 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComplex VAE with Heavy-Tailed Likelihood for Radar Target Detection in Sea Clutter
Jun 09, 2026To address the heavy-tailed, spike-prone nature of sea clutter and the scarcity of labeled target data, an unsupervised complex-valued variational autoencoder (VAE) for maritime radar target detection is proposed. In implementation, each complex baseband slow-time sequence is represented by its in-phase and quadrature components, and the model learns their joint reconstruction from clutter-only data. A Student-\(t\) negative log-likelihood is adopted to capture heavy-tailed reconstruction errors while reducing sensitivity to outliers during clutter learning. In addition, a time-domain amplitude error constraint is introduced to penalize slow-time magnitude mismatch in the reconstruction. At inference, reconstruction deviation is used as the detection statistic, and the decision threshold is set via an empirical quantile estimated from a clutter-only validation set to enforce a constant false-alarm rate (CFAR). Experiments on measured sea-clutter data show that detection performance is consistently improved over MF, AMF, and a real-valued \(β\)-VAE under CFAR constraints.
CC-OCR V2: Benchmarking Large Multimodal Models for Literacy in Real-world Document Processing
May 05, 2026Large Multimodal Models (LMMs) have recently shown strong performance on Optical Character Recognition (OCR) tasks, demonstrating their promising capability in document literacy. However, their effectiveness in real-world applications remains underexplored, as existing benchmarks adopt task scopes misaligned with practical applications and assume homogeneous acquisition conditions. To address this gap, we introduce CC-OCR V2, a comprehensive and challenging OCR benchmark tailored to real-world document processing. CC-OCR V2 focuses on practical enterprise document processing tasks and incorporates hard and corner cases that are critical yet underrepresented in prior benchmarks, covering 5 major OCR-centric tracks: text recognition, document parsing, document grounding, key information extraction, and document question answering, comprising 7,093 high-difficulty samples. Extensive experiments on 14 advanced LMMs reveal that current models fall short of real-world application requirements. Even state-of-the-art LMMs exhibit substantial performance degradation across diverse tasks and scenarios. These findings reveal a significant gap between performance on current benchmarks and effectiveness in real-world applications. We release the full dataset and evaluation toolkit at https://github.com/eioss/CC-OCR-V2.
Subspace Fusion Sensing for Cooperative ISAC
Mar 09, 2026This paper proposes a subspace fusion sensing algorithm for cooperative integrated sensing and communication. First, we stack the received signals from access points (APs) into a third-order tensor and construct the equivalent virtual antenna (EVA) array via tensor unfolding. Then, a data association-free subspace-based fusion sensing algorithm is developed utilizing the EVA arrays from distributed APs. A derivation of Cramer-Rao lower bound (CRLB) is also presented. Finally, simulation results validate the effectiveness of the proposed algorithm compared to traditional techniques.
Neural personal sound zones with flexible bright zone control
Dec 11, 2025Personal sound zone (PSZ) reproduction system, which attempts to create distinct virtual acoustic scenes for different listeners at their respective positions within the same spatial area using one loudspeaker array, is a fundamental technology in the application of virtual reality. For practical applications, the reconstruction targets must be measured on the same fixed receiver array used to record the local room impulse responses (RIRs) from the loudspeaker array to the control points in each PSZ, which makes the system inconvenient and costly for real-world use. In this paper, a 3D convolutional neural network (CNN) designed for PSZ reproduction with flexible control microphone grid and alternative reproduction target is presented, utilizing the virtual target scene as inputs and the PSZ pre-filters as output. Experimental results of the proposed method are compared with the traditional method, demonstrating that the proposed method is able to handle varied reproduction targets on flexible control point grid using only one training session. Furthermore, the proposed method also demonstrates the capability to learn global spatial information from sparse sampling points distributed in PSZs.
A Two-Stage ISAC Framework for Low-Altitude Economy Based on 5G NR Signals
Nov 18, 2025The evolution of next-generation wireless networks has spurred the vigorous development of the low-altitude economy (LAE). To support this emerging field while remaining compatible with existing network architectures, integrated sensing and communication (ISAC) based on 5G New Radio (NR) signals is regarded as a promising solution. However, merely leveraging standard 5G NR signals, such as the Synchronization Signal Block (SSB), presents fundamental limitations in sensing resolution. To address the issue, this paper proposes a two-stage coarse-to-fine sensing framework that utilizes standard 5G NR initial access signals augmented by a custom-designed sparse pilot structure (SPS) for high-precision unmanned aerial vehicles (UAV) sensing. In Stage I, we first fuse information from the SSB, Type\#0-PDCCH, and system information block 1 (SIB1) to ensure the initial target detection. In Stage II, a refined estimation algorithm is introduced to overcome the resolution limitations of these signals. Inspired by the sparse array theory, this stage employs a novel SPS, which is inserted into resource blocks (RBs) within the CORSET\#0 bandwidth. To accurately extract the off-grid range and velocity parameters from these sparse pilots, we develop a corresponding high-resolution algorithm based on the weighted unwrapped phase (WUP) technique and the RELAX-based iterative method. Finally, the density-based spatial clustering of applications with noise (DBSCAN) algorithm is adopted to prune the redundant detections arising from beam overlap. Comprehensive simulation results demonstrate the superior estimation accuracy and computational efficiency of the proposed framework in comparison to other techniques.
OmniParser V2: Structured-Points-of-Thought for Unified Visual Text Parsing and Its Generality to Multimodal Large Language Models
Feb 22, 2025Visually-situated text parsing (VsTP) has recently seen notable advancements, driven by the growing demand for automated document understanding and the emergence of large language models capable of processing document-based questions. While various methods have been proposed to tackle the complexities of VsTP, existing solutions often rely on task-specific architectures and objectives for individual tasks. This leads to modal isolation and complex workflows due to the diversified targets and heterogeneous schemas. In this paper, we introduce OmniParser V2, a universal model that unifies VsTP typical tasks, including text spotting, key information extraction, table recognition, and layout analysis, into a unified framework. Central to our approach is the proposed Structured-Points-of-Thought (SPOT) prompting schemas, which improves model performance across diverse scenarios by leveraging a unified encoder-decoder architecture, objective, and input\&output representation. SPOT eliminates the need for task-specific architectures and loss functions, significantly simplifying the processing pipeline. Our extensive evaluations across four tasks on eight different datasets show that OmniParser V2 achieves state-of-the-art or competitive results in VsTP. Additionally, we explore the integration of SPOT within a multimodal large language model structure, further enhancing text localization and recognition capabilities, thereby confirming the generality of SPOT prompting technique. The code is available at \href{https://github.com/AlibabaResearch/AdvancedLiterateMachinery}{AdvancedLiterateMachinery}.
Qwen2.5-VL Technical Report
Feb 19, 2025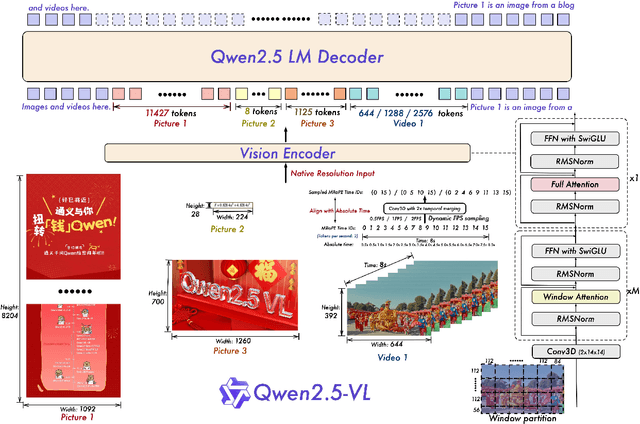
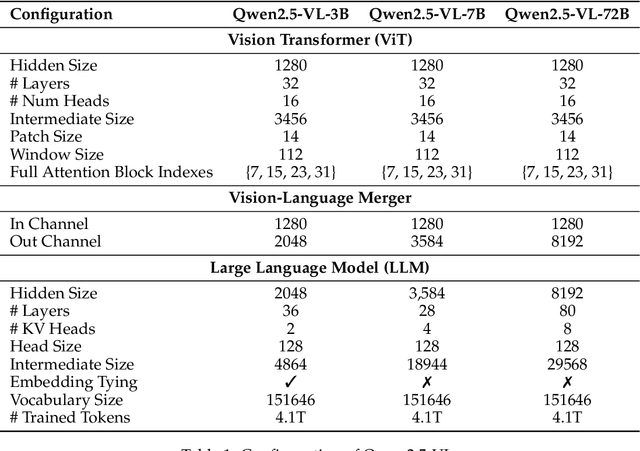
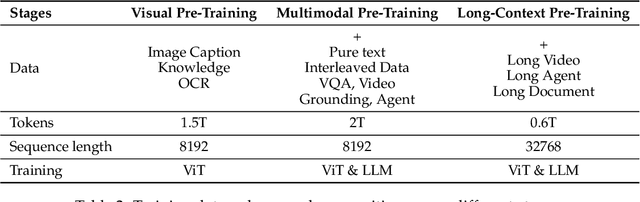
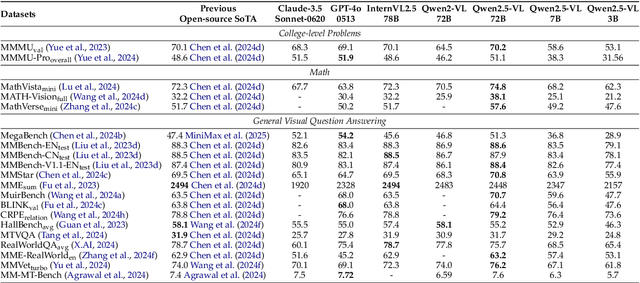
We introduce Qwen2.5-VL, the latest flagship model of Qwen vision-language series, which demonstrates significant advancements in both foundational capabilities and innovative functionalities. Qwen2.5-VL achieves a major leap forward in understanding and interacting with the world through enhanced visual recognition, precise object localization, robust document parsing, and long-video comprehension. A standout feature of Qwen2.5-VL is its ability to localize objects using bounding boxes or points accurately. It provides robust structured data extraction from invoices, forms, and tables, as well as detailed analysis of charts, diagrams, and layouts. To handle complex inputs, Qwen2.5-VL introduces dynamic resolution processing and absolute time encoding, enabling it to process images of varying sizes and videos of extended durations (up to hours) with second-level event localization. This allows the model to natively perceive spatial scales and temporal dynamics without relying on traditional normalization techniques. By training a native dynamic-resolution Vision Transformer (ViT) from scratch and incorporating Window Attention, we reduce computational overhead while maintaining native resolution. As a result, Qwen2.5-VL excels not only in static image and document understanding but also as an interactive visual agent capable of reasoning, tool usage, and task execution in real-world scenarios such as operating computers and mobile devices. Qwen2.5-VL is available in three sizes, addressing diverse use cases from edge AI to high-performance computing. The flagship Qwen2.5-VL-72B model matches state-of-the-art models like GPT-4o and Claude 3.5 Sonnet, particularly excelling in document and diagram understanding. Additionally, Qwen2.5-VL maintains robust linguistic performance, preserving the core language competencies of the Qwen2.5 LLM.
Cooperative ISAC-empowered Low-Altitude Economy
Dec 29, 2024This paper proposes a cooperative integrated sensing and communication (ISAC) scheme for the low-altitude sensing scenario, aiming at estimating the parameters of the unmanned aerial vehicles (UAVs) and enhancing the sensing performance via cooperation. The proposed scheme consists of two stages. In Stage I, we formulate the monostatic parameter estimation problem via using a tensor decomposition model. By leveraging the Vandermonde structure of the factor matrix, a spatial smoothing tensor decomposition scheme is introduced to estimate the UAVs' parameters. To further reduce the computational complexity, we design a reduced-dimensional (RD) angle of arrival (AoA) estimation algorithm based on generalized Rayleigh quotient (GRQ). In Stage II, the positions and true velocities of the UAVs are determined through the data fusion across multiple base stations (BSs). Specifically, we first develop a false removing minimum spanning tree (MST)-based data association method to accurately match the BSs' parameter estimations to the same UAV. Then, a Pareto optimality method and a residual weighting scheme are developed to facilitate the position and velocity estimation, respectively. We further extend our approach to the dual-polarized system. Simulation results validate the effectiveness of the proposed schemes in comparison to the conventional techniques.
CC-OCR: A Comprehensive and Challenging OCR Benchmark for Evaluating Large Multimodal Models in Literacy
Dec 03, 2024Large Multimodal Models (LMMs) have demonstrated impressive performance on recognizing document images with natural language instructions. However, it remains unclear to what extent capabilities in literacy with rich structure and fine-grained visual challenges. The current landscape lacks a comprehensive benchmark to effectively measure the literate capabilities of LMMs. Existing benchmarks are often limited by narrow scenarios and specified tasks. To this end, we introduce CC-OCR, a comprehensive benchmark that possess a diverse range of scenarios, tasks, and challenges. CC-OCR comprises four OCR-centric tracks: multi-scene text reading, multilingual text reading, document parsing, and key information extraction. It includes 39 subsets with 7,058 full annotated images, of which 41% are sourced from real applications, being released for the first time. Furthermore, we evaluate nine prominent LMMs and reveal both the strengths and weaknesses of these models, particularly in text grounding, multi-orientation, and hallucination of repetition. CC-OCR aims to comprehensively evaluate the capabilities of LMMs on OCR-centered tasks, driving advancement in LMMs.
An Event-centric Framework for Predicting Crime Hotspots with Flexible Time Intervals
Nov 02, 2024



Predicting crime hotspots in a city is a complex and critical task with significant societal implications. Numerous spatiotemporal correlations and irregularities pose substantial challenges to this endeavor. Existing methods commonly employ fixed-time granularities and sequence prediction models. However, determining appropriate time granularities is difficult, leading to inaccurate predictions for specific time windows. For example, users might ask: What are the crime hotspots during 12:00-20:00? To address this issue, we introduce FlexiCrime, a novel event-centric framework for predicting crime hotspots with flexible time intervals. FlexiCrime incorporates a continuous-time attention network to capture correlations between crime events, which learns crime context features, representing general crime patterns across time points and locations. Furthermore, we introduce a type-aware spatiotemporal point process that learns crime-evolving features, measuring the risk of specific crime types at a given time and location by considering the frequency of past crime events. The crime context and evolving features together allow us to predict whether an urban area is a crime hotspot given a future time interval. To evaluate FlexiCrime's effectiveness, we conducted experiments using real-world datasets from two cities, covering twelve crime types. The results show that our model outperforms baseline techniques in predicting crime hotspots over flexible time intervals.