 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultiWorld: Scalable Multi-Agent Multi-View Video World Models
Apr 21, 2026Video world models have achieved remarkable success in simulating environmental dynamics in response to actions by users or agents. They are modeled as action-conditioned video generation models that take historical frames and current actions as input to predict future frames. Yet, most existing approaches are limited to single-agent scenarios and fail to capture the complex interactions inherent in real-world multi-agent systems. We present \textbf{MultiWorld}, a unified framework for multi-agent multi-view world modeling that enables accurate control of multiple agents while maintaining multi-view consistency. We introduce the Multi-Agent Condition Module to achieve precise multi-agent controllability, and the Global State Encoder to ensure coherent observations across different views. MultiWorld supports flexible scaling of agent and view counts, and synthesizes different views in parallel for high efficiency. Experiments on multi-player game environments and multi-robot manipulation tasks demonstrate that MultiWorld outperforms baselines in video fidelity, action-following ability, and multi-view consistency. Project page: https://multi-world.github.io/
ComSim: Building Scalable Real-World Robot Data Generation via Compositional Simulation
Apr 13, 2026Recent advancements in foundational models, such as large language models and world models, have greatly enhanced the capabilities of robotics, enabling robots to autonomously perform complex tasks. However, acquiring large-scale, high-quality training data for robotics remains a challenge, as it often requires substantial manual effort and is limited in its coverage of diverse real-world environments. To address this, we propose a novel hybrid approach called Compositional Simulation, which combines classical simulation and neural simulation to generate accurate action-video pairs while maintaining real-world consistency. Our approach utilizes a closed-loop real-sim-real data augmentation pipeline, leveraging a small amount of real-world data to generate diverse, large-scale training datasets that cover a broader spectrum of real-world scenarios. We train a neural simulator to transform classical simulation videos into real-world representations, improving the accuracy of policy models trained in real-world environments. Through extensive experiments, we demonstrate that our method significantly reduces the sim2real domain gap, resulting in higher success rates in real-world policy model training. Our approach offers a scalable solution for generating robust training data and bridging the gap between simulated and real-world robotics.
CineScene: Implicit 3D as Effective Scene Representation for Cinematic Video Generation
Feb 06, 2026Cinematic video production requires control over scene-subject composition and camera movement, but live-action shooting remains costly due to the need for constructing physical sets. To address this, we introduce the task of cinematic video generation with decoupled scene context: given multiple images of a static environment, the goal is to synthesize high-quality videos featuring dynamic subject while preserving the underlying scene consistency and following a user-specified camera trajectory. We present CineScene, a framework that leverages implicit 3D-aware scene representation for cinematic video generation. Our key innovation is a novel context conditioning mechanism that injects 3D-aware features in an implicit way: By encoding scene images into visual representations through VGGT, CineScene injects spatial priors into a pretrained text-to-video generation model by additional context concatenation, enabling camera-controlled video synthesis with consistent scenes and dynamic subjects. To further enhance the model's robustness, we introduce a simple yet effective random-shuffling strategy for the input scene images during training. To address the lack of training data, we construct a scene-decoupled dataset with Unreal Engine 5, containing paired videos of scenes with and without dynamic subjects, panoramic images representing the underlying static scene, along with their camera trajectories. Experiments show that CineScene achieves state-of-the-art performance in scene-consistent cinematic video generation, handling large camera movements and demonstrating generalization across diverse environments.
OmniX: From Unified Panoramic Generation and Perception to Graphics-Ready 3D Scenes
Oct 30, 2025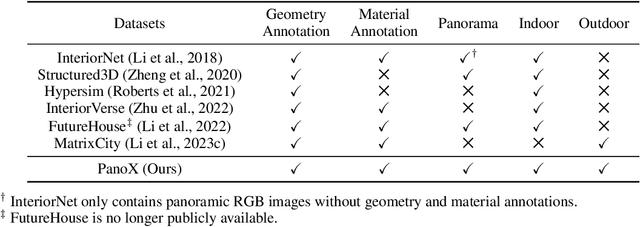
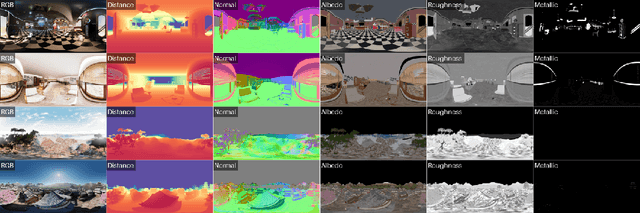
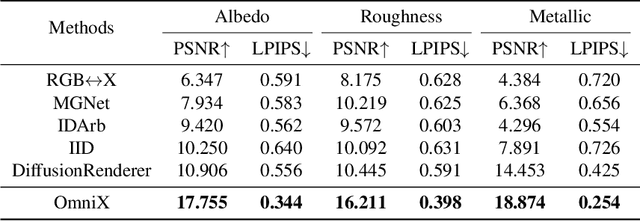
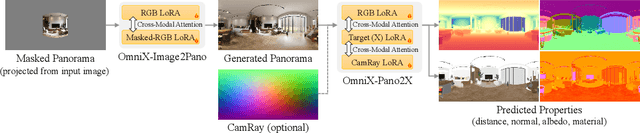
There are two prevalent ways to constructing 3D scenes: procedural generation and 2D lifting. Among them, panorama-based 2D lifting has emerged as a promising technique, leveraging powerful 2D generative priors to produce immersive, realistic, and diverse 3D environments. In this work, we advance this technique to generate graphics-ready 3D scenes suitable for physically based rendering (PBR), relighting, and simulation. Our key insight is to repurpose 2D generative models for panoramic perception of geometry, textures, and PBR materials. Unlike existing 2D lifting approaches that emphasize appearance generation and ignore the perception of intrinsic properties, we present OmniX, a versatile and unified framework. Based on a lightweight and efficient cross-modal adapter structure, OmniX reuses 2D generative priors for a broad range of panoramic vision tasks, including panoramic perception, generation, and completion. Furthermore, we construct a large-scale synthetic panorama dataset containing high-quality multimodal panoramas from diverse indoor and outdoor scenes. Extensive experiments demonstrate the effectiveness of our model in panoramic visual perception and graphics-ready 3D scene generation, opening new possibilities for immersive and physically realistic virtual world generation.
A Survey of Interactive Generative Video
Apr 30, 2025



Interactive Generative Video (IGV) has emerged as a crucial technology in response to the growing demand for high-quality, interactive video content across various domains. In this paper, we define IGV as a technology that combines generative capabilities to produce diverse high-quality video content with interactive features that enable user engagement through control signals and responsive feedback. We survey the current landscape of IGV applications, focusing on three major domains: 1) gaming, where IGV enables infinite exploration in virtual worlds; 2) embodied AI, where IGV serves as a physics-aware environment synthesizer for training agents in multimodal interaction with dynamically evolving scenes; and 3) autonomous driving, where IGV provides closed-loop simulation capabilities for safety-critical testing and validation. To guide future development, we propose a comprehensive framework that decomposes an ideal IGV system into five essential modules: Generation, Control, Memory, Dynamics, and Intelligence. Furthermore, we systematically analyze the technical challenges and future directions in realizing each component for an ideal IGV system, such as achieving real-time generation, enabling open-domain control, maintaining long-term coherence, simulating accurate physics, and integrating causal reasoning. We believe that this systematic analysis will facilitate future research and development in the field of IGV, ultimately advancing the technology toward more sophisticated and practical applications.
Position: Interactive Generative Video as Next-Generation Game Engine
Mar 21, 2025Modern game development faces significant challenges in creativity and cost due to predetermined content in traditional game engines. Recent breakthroughs in video generation models, capable of synthesizing realistic and interactive virtual environments, present an opportunity to revolutionize game creation. In this position paper, we propose Interactive Generative Video (IGV) as the foundation for Generative Game Engines (GGE), enabling unlimited novel content generation in next-generation gaming. GGE leverages IGV's unique strengths in unlimited high-quality content synthesis, physics-aware world modeling, user-controlled interactivity, long-term memory capabilities, and causal reasoning. We present a comprehensive framework detailing GGE's core modules and a hierarchical maturity roadmap (L0-L4) to guide its evolution. Our work charts a new course for game development in the AI era, envisioning a future where AI-powered generative systems fundamentally reshape how games are created and experienced.
GameFactory: Creating New Games with Generative Interactive Videos
Jan 14, 2025



Generative game engines have the potential to revolutionize game development by autonomously creating new content and reducing manual workload. However, existing video-based game generation methods fail to address the critical challenge of scene generalization, limiting their applicability to existing games with fixed styles and scenes. In this paper, we present GameFactory, a framework focused on exploring scene generalization in game video generation. To enable the creation of entirely new and diverse games, we leverage pre-trained video diffusion models trained on open-domain video data. To bridge the domain gap between open-domain priors and small-scale game dataset, we propose a multi-phase training strategy that decouples game style learning from action control, preserving open-domain generalization while achieving action controllability. Using Minecraft as our data source, we release GF-Minecraft, a high-quality and diversity action-annotated video dataset for research. Furthermore, we extend our framework to enable autoregressive action-controllable game video generation, allowing the production of unlimited-length interactive game videos. Experimental results demonstrate that GameFactory effectively generates open-domain, diverse, and action-controllable game videos, representing a significant step forward in AI-driven game generation. Our dataset and project page are publicly available at \url{https://vvictoryuki.github.io/gamefactory/}.
WorldSimBench: Towards Video Generation Models as World Simulators
Oct 23, 2024



Recent advancements in predictive models have demonstrated exceptional capabilities in predicting the future state of objects and scenes. However, the lack of categorization based on inherent characteristics continues to hinder the progress of predictive model development. Additionally, existing benchmarks are unable to effectively evaluate higher-capability, highly embodied predictive models from an embodied perspective. In this work, we classify the functionalities of predictive models into a hierarchy and take the first step in evaluating World Simulators by proposing a dual evaluation framework called WorldSimBench. WorldSimBench includes Explicit Perceptual Evaluation and Implicit Manipulative Evaluation, encompassing human preference assessments from the visual perspective and action-level evaluations in embodied tasks, covering three representative embodied scenarios: Open-Ended Embodied Environment, Autonomous, Driving, and Robot Manipulation. In the Explicit Perceptual Evaluation, we introduce the HF-Embodied Dataset, a video assessment dataset based on fine-grained human feedback, which we use to train a Human Preference Evaluator that aligns with human perception and explicitly assesses the visual fidelity of World Simulators. In the Implicit Manipulative Evaluation, we assess the video-action consistency of World Simulators by evaluating whether the generated situation-aware video can be accurately translated into the correct control signals in dynamic environments. Our comprehensive evaluation offers key insights that can drive further innovation in video generation models, positioning World Simulators as a pivotal advancement toward embodied artificial intelligence.
Diffusion-Based Hierarchical Image Steganography
May 19, 2024



This paper introduces Hierarchical Image Steganography, a novel method that enhances the security and capacity of embedding multiple images into a single container using diffusion models. HIS assigns varying levels of robustness to images based on their importance, ensuring enhanced protection against manipulation. It adaptively exploits the robustness of the Diffusion Model alongside the reversibility of the Flow Model. The integration of Embed-Flow and Enhance-Flow improves embedding efficiency and image recovery quality, respectively, setting HIS apart from conventional multi-image steganography techniques. This innovative structure can autonomously generate a container image, thereby securely and efficiently concealing multiple images and text. Rigorous subjective and objective evaluations underscore our advantage in analytical resistance, robustness, and capacity, illustrating its expansive applicability in content safeguarding and privacy fortification.
V2A-Mark: Versatile Deep Visual-Audio Watermarking for Manipulation Localization and Copyright Protection
Apr 25, 2024



AI-generated video has revolutionized short video production, filmmaking, and personalized media, making video local editing an essential tool. However, this progress also blurs the line between reality and fiction, posing challenges in multimedia forensics. To solve this urgent issue, V2A-Mark is proposed to address the limitations of current video tampering forensics, such as poor generalizability, singular function, and single modality focus. Combining the fragility of video-into-video steganography with deep robust watermarking, our method can embed invisible visual-audio localization watermarks and copyright watermarks into the original video frames and audio, enabling precise manipulation localization and copyright protection. We also design a temporal alignment and fusion module and degradation prompt learning to enhance the localization accuracy and decoding robustness. Meanwhile, we introduce a sample-level audio localization method and a cross-modal copyright extraction mechanism to couple the information of audio and video frames. The effectiveness of V2A-Mark has been verified on a visual-audio tampering dataset, emphasizing its superiority in localization precision and copyright accuracy, crucial for the sustainable development of video editing in the AIGC video era.