 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCOMPASS: Cognitive MCTS-Guided Process Alignment for Safe Search Agents
May 29, 2026LLM-powered search agents enable multi-step reasoning and tool use. However, these capabilities introduce retrieval-induced safety degradation, as harmful intents may decompose into seemingly innocuous sub-queries that lead to unsafe outcomes. Existing alignment methods struggle to capture sparse safety signals and fail to supervise diverse violations across multi-step interactions. We propose COMPASS, a Cognitive MCTS-Guided Process Alignment framework designed to achieve robust safety alignment throughout the agent workflow while preserving general utility. COMPASS integrates cognitive tree exploration (CTE) to efficiently synthesize stealthy attack trajectories, and introspective step-wise alignment (ISA) to isolate risky intermediate actions for fine-grained process supervision. Empirical results show that COMPASS achieves a favorable safety-utility trade-off while requiring substantially less training data.
Flying Hand: End-Effector-Centric Framework for Versatile Aerial Manipulation Teleoperation and Policy Learning
Apr 14, 2025Aerial manipulation has recently attracted increasing interest from both industry and academia. Previous approaches have demonstrated success in various specific tasks. However, their hardware design and control frameworks are often tightly coupled with task specifications, limiting the development of cross-task and cross-platform algorithms. Inspired by the success of robot learning in tabletop manipulation, we propose a unified aerial manipulation framework with an end-effector-centric interface that decouples high-level platform-agnostic decision-making from task-agnostic low-level control. Our framework consists of a fully-actuated hexarotor with a 4-DoF robotic arm, an end-effector-centric whole-body model predictive controller, and a high-level policy. The high-precision end-effector controller enables efficient and intuitive aerial teleoperation for versatile tasks and facilitates the development of imitation learning policies. Real-world experiments show that the proposed framework significantly improves end-effector tracking accuracy, and can handle multiple aerial teleoperation and imitation learning tasks, including writing, peg-in-hole, pick and place, changing light bulbs, etc. We believe the proposed framework provides one way to standardize and unify aerial manipulation into the general manipulation community and to advance the field. Project website: https://lecar-lab.github.io/flying_hand/.
Joint Similarity Item Exploration and Overlapped User Guidance for Multi-Modal Cross-Domain Recommendation
Feb 22, 2025Cross-Domain Recommendation (CDR) has been widely investigated for solving long-standing data sparsity problem via knowledge sharing across domains. In this paper, we focus on the Multi-Modal Cross-Domain Recommendation (MMCDR) problem where different items have multi-modal information while few users are overlapped across domains. MMCDR is particularly challenging in two aspects: fully exploiting diverse multi-modal information within each domain and leveraging useful knowledge transfer across domains. However, previous methods fail to cluster items with similar characteristics while filtering out inherit noises within different modalities, hurdling the model performance. What is worse, conventional CDR models primarily rely on overlapped users for domain adaptation, making them ill-equipped to handle scenarios where the majority of users are non-overlapped. To fill this gap, we propose Joint Similarity Item Exploration and Overlapped User Guidance (SIEOUG) for solving the MMCDR problem. SIEOUG first proposes similarity item exploration module, which not only obtains pair-wise and group-wise item-item graph knowledge, but also reduces irrelevant noise for multi-modal modeling. Then SIEOUG proposes user-item collaborative filtering module to aggregate user/item embeddings with the attention mechanism for collaborative filtering. Finally SIEOUG proposes overlapped user guidance module with optimal user matching for knowledge sharing across domains. Our empirical study on Amazon dataset with several different tasks demonstrates that SIEOUG significantly outperforms the state-of-the-art models under the MMCDR setting.
FOOGD: Federated Collaboration for Both Out-of-distribution Generalization and Detection
Oct 15, 2024



Federated learning (FL) is a promising machine learning paradigm that collaborates with client models to capture global knowledge. However, deploying FL models in real-world scenarios remains unreliable due to the coexistence of in-distribution data and unexpected out-of-distribution (OOD) data, such as covariate-shift and semantic-shift data. Current FL researches typically address either covariate-shift data through OOD generalization or semantic-shift data via OOD detection, overlooking the simultaneous occurrence of various OOD shifts. In this work, we propose FOOGD, a method that estimates the probability density of each client and obtains reliable global distribution as guidance for the subsequent FL process. Firstly, SM3D in FOOGD estimates score model for arbitrary distributions without prior constraints, and detects semantic-shift data powerfully. Then SAG in FOOGD provides invariant yet diverse knowledge for both local covariate-shift generalization and client performance generalization. In empirical validations, FOOGD significantly enjoys three main advantages: (1) reliably estimating non-normalized decentralized distributions, (2) detecting semantic shift data via score values, and (3) generalizing to covariate-shift data by regularizing feature extractor. The prejoct is open in https://github.com/XeniaLLL/FOOGD-main.git.
Executing Arithmetic: Fine-Tuning Large Language Models as Turing Machines
Oct 10, 2024



Large Language Models (LLMs) have demonstrated remarkable capabilities across a wide range of natural language processing and reasoning tasks. However, their performance in the foundational domain of arithmetic remains unsatisfactory. When dealing with arithmetic tasks, LLMs often memorize specific examples rather than learning the underlying computational logic, limiting their ability to generalize to new problems. In this paper, we propose a Composable Arithmetic Execution Framework (CAEF) that enables LLMs to learn to execute step-by-step computations by emulating Turing Machines, thereby gaining a genuine understanding of computational logic. Moreover, the proposed framework is highly scalable, allowing composing learned operators to significantly reduce the difficulty of learning complex operators. In our evaluation, CAEF achieves nearly 100% accuracy across seven common mathematical operations on the LLaMA 3.1-8B model, effectively supporting computations involving operands with up to 100 digits, a level where GPT-4o falls short noticeably in some settings.
Flying Calligrapher: Contact-Aware Motion and Force Planning and Control for Aerial Manipulation
Jul 08, 2024



Aerial manipulation has gained interest in completing high-altitude tasks that are challenging for human workers, such as contact inspection and defect detection, etc. Previous research has focused on maintaining static contact points or forces. This letter addresses a more general and dynamic task: simultaneously tracking time-varying contact force in the surface normal direction and motion trajectories on tangential surfaces. We propose a pipeline that includes a contact-aware trajectory planner to generate dynamically feasible trajectories, and a hybrid motion-force controller to track such trajectories. We demonstrate the approach in an aerial calligraphy task using a novel sponge pen design as the end-effector, whose stroke width is proportional to the contact force. Additionally, we develop a touchscreen interface for flexible user input. Experiments show our method can effectively draw diverse letters, achieving an IoU of 0.59 and an end-effector position (force) tracking RMSE of 2.9 cm (0.7 N). Website: https://xiaofeng-guo.github.io/flying-calligrapher/
SubT-MRS: A Subterranean, Multi-Robot, Multi-Spectral and Multi-Degraded Dataset for Robust SLAM
Aug 02, 2023



In recent years, significant progress has been made in the field of simultaneous localization and mapping (SLAM) research. However, current state-of-the-art solutions still struggle with limited accuracy and robustness in real-world applications. One major reason is the lack of datasets that fully capture the conditions faced by robots in the wild. To address this problem, we present SubT-MRS, an extremely challenging real-world dataset designed to push the limits of SLAM and perception algorithms. SubT-MRS is a multi-modal, multi-robot dataset collected mainly from subterranean environments having multi-degraded conditions including structureless corridors, varying lighting conditions, and perceptual obscurants such as smoke and dust. Furthermore, the dataset packages information from a diverse range of time-synchronized sensors, including LiDAR, visual cameras, thermal cameras, and IMUs captured using varied vehicular motions like aerial, legged, and wheeled, to support research in sensor fusion, which is essential for achieving accurate and robust robotic perception in complex environments. To evaluate the accuracy of SLAM systems, we also provide a dense 3D model with sub-centimeter-level accuracy, as well as accurate 6DoF ground truth. Our benchmarking approach includes several state-of-the-art methods to demonstrate the challenges our datasets introduce, particularly in the case of multi-degraded environments.
PyPose: A Library for Robot Learning with Physics-based Optimization
Sep 30, 2022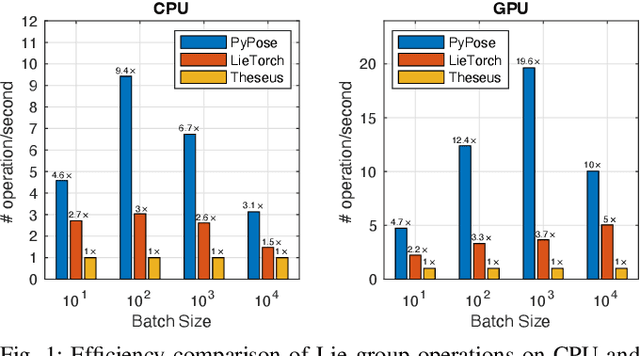
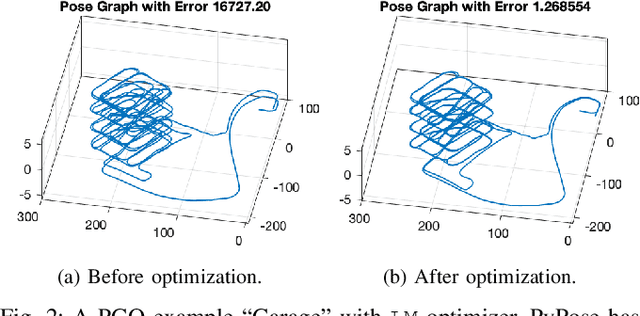
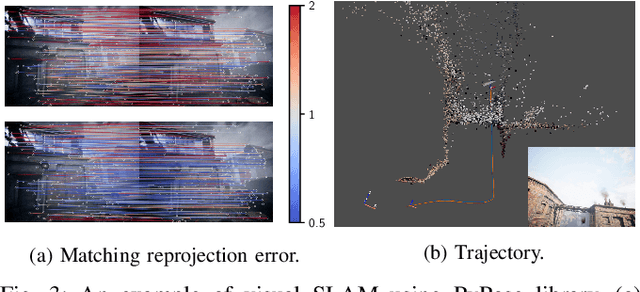
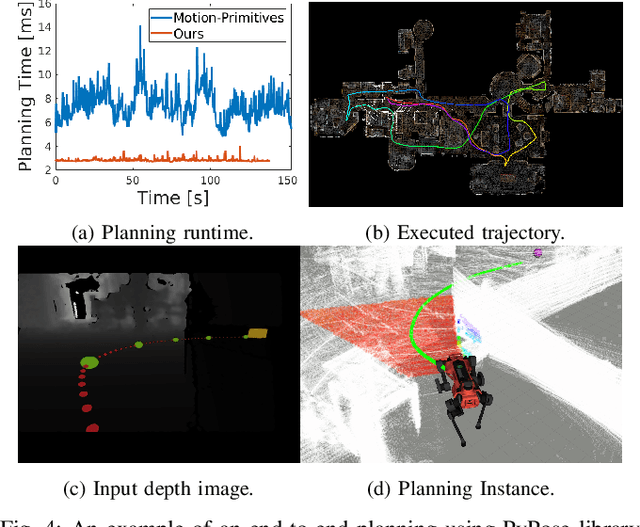
Deep learning has had remarkable success in robotic perception, but its data-centric nature suffers when it comes to generalizing to ever-changing environments. By contrast, physics-based optimization generalizes better, but it does not perform as well in complicated tasks due to the lack of high-level semantic information and the reliance on manual parametric tuning. To take advantage of these two complementary worlds, we present PyPose: a robotics-oriented, PyTorch-based library that combines deep perceptual models with physics-based optimization techniques. Our design goal for PyPose is to make it user-friendly, efficient, and interpretable with a tidy and well-organized architecture. Using an imperative style interface, it can be easily integrated into real-world robotic applications. Besides, it supports parallel computing of any order gradients of Lie groups and Lie algebras and $2^{\text{nd}}$-order optimizers, such as trust region methods. Experiments show that PyPose achieves 3-20$\times$ speedup in computation compared to state-of-the-art libraries. To boost future research, we provide concrete examples across several fields of robotics, including SLAM, inertial navigation, planning, and control.