 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePRoID: Predicted Rate of Information Delivery in Multi-Robot Exploration and Relaying
Apr 12, 2026We address Multi-Robot Exploration and Relaying (MRER): a team of robots must explore an unknown environment and deliver acquired information to a fixed base station within a mission time limit. The central challenge is deciding when each robot should stop exploring and relay: this depends on what the robot is likely to find ahead, what information it uniquely holds, and whether immediate or future delivery is more valuable. Prior approaches either ignore the reporting requirement entirely or rely on fixed-schedule relay strategies that cannot adapt to environment structure, team composition, or mission progress. We introduce PRoID (Predicted Rate of Information Delivery), a relay criterion that uses learned map prediction to estimate each robot's future information gain along its planned path, accounting for what teammates are already relaying. PRoID triggers relay when immediate return yields higher information delivery per unit time. We further propose PRoID-Safe, a failure-aware extension that incorporates robot survival probability into the relay criterion, naturally biasing decisions toward earlier relay as failure risk grows. We evaluate on real-world indoor floor plan datasets and show that PRoID and PRoID-Safe outperform fixed-schedule baselines, with stronger relative gains in failure scenarios.
Demonstrating ViSafe: Vision-enabled Safety for High-speed Detect and Avoid
May 08, 2025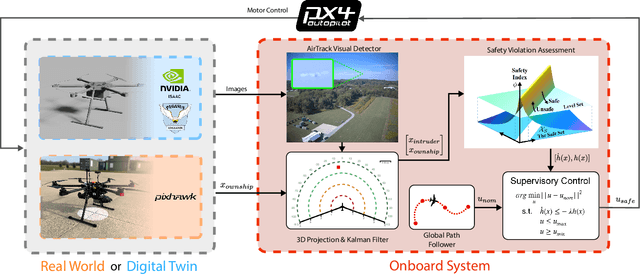
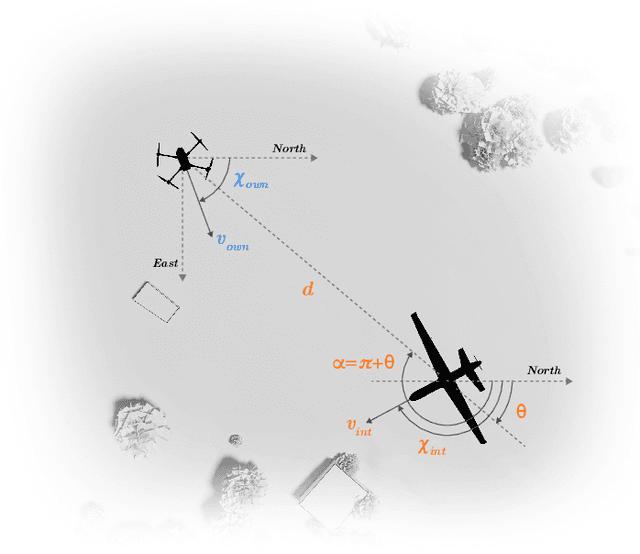
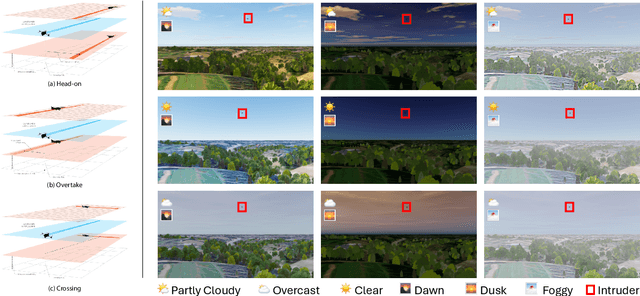
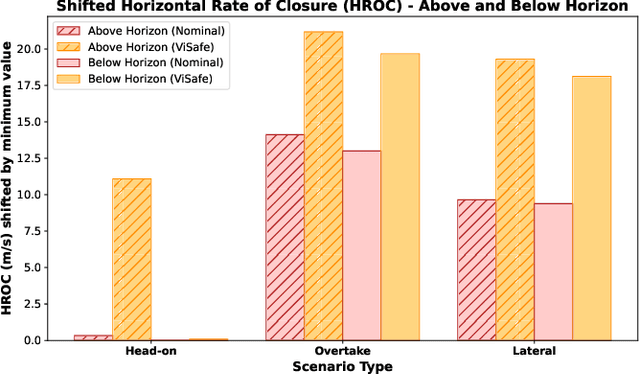
Assured safe-separation is essential for achieving seamless high-density operation of airborne vehicles in a shared airspace. To equip resource-constrained aerial systems with this safety-critical capability, we present ViSafe, a high-speed vision-only airborne collision avoidance system. ViSafe offers a full-stack solution to the Detect and Avoid (DAA) problem by tightly integrating a learning-based edge-AI framework with a custom multi-camera hardware prototype designed under SWaP-C constraints. By leveraging perceptual input-focused control barrier functions (CBF) to design, encode, and enforce safety thresholds, ViSafe can provide provably safe runtime guarantees for self-separation in high-speed aerial operations. We evaluate ViSafe's performance through an extensive test campaign involving both simulated digital twins and real-world flight scenarios. By independently varying agent types, closure rates, interaction geometries, and environmental conditions (e.g., weather and lighting), we demonstrate that ViSafe consistently ensures self-separation across diverse scenarios. In first-of-its-kind real-world high-speed collision avoidance tests with closure rates reaching 144 km/h, ViSafe sets a new benchmark for vision-only autonomous collision avoidance, establishing a new standard for safety in high-speed aerial navigation.
PIPE Planner: Pathwise Information Gain with Map Predictions for Indoor Robot Exploration
Mar 10, 2025



Autonomous exploration in unknown environments requires estimating the information gain of an action to guide planning decisions. While prior approaches often compute information gain at discrete waypoints, pathwise integration offers a more comprehensive estimation but is often computationally challenging or infeasible and prone to overestimation. In this work, we propose the Pathwise Information Gain with Map Prediction for Exploration (PIPE) planner, which integrates cumulative sensor coverage along planned trajectories while leveraging map prediction to mitigate overestimation. To enable efficient pathwise coverage computation, we introduce a method to efficiently calculate the expected observation mask along the planned path, significantly reducing computational overhead. We validate PIPE on real-world floorplan datasets, demonstrating its superior performance over state-of-the-art baselines. Our results highlight the benefits of integrating predictive mapping with pathwise information gain for efficient and informed exploration.
MapExRL: Human-Inspired Indoor Exploration with Predicted Environment Context and Reinforcement Learning
Mar 03, 2025



Path planning for robotic exploration is challenging, requiring reasoning over unknown spaces and anticipating future observations. Efficient exploration requires selecting budget-constrained paths that maximize information gain. Despite advances in autonomous exploration, existing algorithms still fall short of human performance, particularly in structured environments where predictive cues exist but are underutilized. Guided by insights from our user study, we introduce MapExRL, which improves robot exploration efficiency in structured indoor environments by enabling longer-horizon planning through reinforcement learning (RL) and global map predictions. Unlike many RL-based exploration methods that use motion primitives as the action space, our approach leverages frontiers for more efficient model learning and longer horizon reasoning. Our framework generates global map predictions from the observed map, which our policy utilizes, along with the prediction uncertainty, estimated sensor coverage, frontier distance, and remaining distance budget, to assess the strategic long-term value of frontiers. By leveraging multiple frontier scoring methods and additional context, our policy makes more informed decisions at each stage of the exploration. We evaluate our framework on a real-world indoor map dataset, achieving up to an 18.8% improvement over the strongest state-of-the-art baseline, with even greater gains compared to conventional frontier-based algorithms.
IA-TIGRIS: An Incremental and Adaptive Sampling-Based Planner for Online Informative Path Planning
Feb 21, 2025



Planning paths that maximize information gain for robotic platforms has wide-ranging applications and significant potential impact. To effectively adapt to real-time data collection, informative path planning must be computed online and be responsive to new observations. In this work, we present IA-TIGRIS, an incremental and adaptive sampling-based informative path planner that can be run efficiently with onboard computation. Our approach leverages past planning efforts through incremental refinement while continuously adapting to updated world beliefs. We additionally present detailed implementation and optimization insights to facilitate real-world deployment, along with an array of reward functions tailored to specific missions and behaviors. Extensive simulation results demonstrate IA-TIGRIS generates higher-quality paths compared to baseline methods. We validate our planner on two distinct hardware platforms: a hexarotor UAV and a fixed-wing UAV, each having unique motion models and configuration spaces. Our results show up to a 41% improvement in information gain compared to baseline methods, suggesting significant potential for deployment in real-world applications.
Informative Sensor Planning for a Single-Axis Gimbaled Camera on a Fixed-Wing UAV
Jul 06, 2024



Uncrewed Aerial Vehicles (UAVs) are a leading choice of platforms for a variety of information-gathering applications. Sensor planning can enhance the efficiency and success of these types of missions when coupled with a higher-level informative path-planning algorithm. This paper aims to address these data acquisition challenges by developing an informative non-myopic sensor planning framework for a single-axis gimbal coupled with an informative path planner to maximize information gain over a prior information map. This is done by finding reduced sensor sweep bounds over a planning horizon such that regions of higher confidence are prioritized. This novel sensor planning framework is evaluated against a predefined sensor sweep and no sensor planning baselines as well as validated in two simulation environments. In our results, we observe an improvement in the performance by 21.88% and 13.34% for the no sensor planning and predefined sensor sweep baselines respectively.
$\textit{UniSaT}$: Unified-Objective Belief Model and Planner to Search for and Track Multiple Objects
May 25, 2024



The problem of path planning for autonomously searching and tracking multiple objects is important to reconnaissance, surveillance, and many other data-gathering applications. Due to the inherent competing objectives of searching for new objects while maintaining tracks for found objects, most current approaches rely on multi-objective planning methods, leaving it up to the user to tune parameters to balance between the two objectives, usually based on heuristics or trial and error. In this paper, we introduce $\textit{UniSaT}$ ($\textit{Unified Search and Track}$), a unified-objective formulation for the search and track problem based on Random Finite Sets (RFS). This is done by modeling both the unknown and known objects through a combined generalized labeled multi-Bernoulli (GLMB) filter. For the unseen objects, we can leverage both cardinality and spatial prior distributions, which means $\textit{UniSaT}$ does not rely on knowing the exact count of the expected number of objects in the space. The planner maximizes the mutual information of this unified belief model, creating balanced search and tracking behaviors. We demonstrate our work in a simulated environment and show both qualitative results as well as quantitative improvements over a multi-objective method.
TartanAviation: Image, Speech, and ADS-B Trajectory Datasets for Terminal Airspace Operations
Mar 05, 2024



We introduce TartanAviation, an open-source multi-modal dataset focused on terminal-area airspace operations. TartanAviation provides a holistic view of the airport environment by concurrently collecting image, speech, and ADS-B trajectory data using setups installed inside airport boundaries. The datasets were collected at both towered and non-towered airfields across multiple months to capture diversity in aircraft operations, seasons, aircraft types, and weather conditions. In total, TartanAviation provides 3.1M images, 3374 hours of Air Traffic Control speech data, and 661 days of ADS-B trajectory data. The data was filtered, processed, and validated to create a curated dataset. In addition to the dataset, we also open-source the code-base used to collect and pre-process the dataset, further enhancing accessibility and usability. We believe this dataset has many potential use cases and would be particularly vital in allowing AI and machine learning technologies to be integrated into air traffic control systems and advance the adoption of autonomous aircraft in the airspace.
Aerial Field Robotics
Jan 19, 2024Aerial field robotics research represents the domain of study that aims to equip unmanned aerial vehicles - and as it pertains to this chapter, specifically Micro Aerial Vehicles (MAVs)- with the ability to operate in real-life environments that present challenges to safe navigation. We present the key elements of autonomy for MAVs that are resilient to collisions and sensing degradation, while operating under constrained computational resources. We overview aspects of the state of the art, outline bottlenecks to resilient navigation autonomy, and overview the field-readiness of MAVs. We conclude with notable contributions and discuss considerations for future research that are essential for resilience in aerial robotics.
WIT-UAS: A Wildland-fire Infrared Thermal Dataset to Detect Crew Assets From Aerial Views
Dec 14, 2023



We present the Wildland-fire Infrared Thermal (WIT-UAS) dataset for long-wave infrared sensing of crew and vehicle assets amidst prescribed wildland fire environments. While such a dataset is crucial for safety monitoring in wildland fire applications, to the authors' awareness, no such dataset focusing on assets near fire is publicly available. Presumably, this is due to the barrier to entry of collaborating with fire management personnel. We present two related data subsets: WIT-UAS-ROS consists of full ROS bag files containing sensor and robot data of UAS flight over the fire, and WIT-UAS-Image contains hand-labeled long-wave infrared (LWIR) images extracted from WIT-UAS-ROS. Our dataset is the first to focus on asset detection in a wildland fire environment. We show that thermal detection models trained without fire data frequently detect false positives by classifying fire as people. By adding our dataset to training, we show that the false positive rate is reduced significantly. Yet asset detection in wildland fire environments is still significantly more challenging than detection in urban environments, due to dense obscuring trees, greater heat variation, and overbearing thermal signal of the fire. We publicize this dataset to encourage the community to study more advanced models to tackle this challenging environment. The dataset, code and pretrained models are available at \url{https://github.com/castacks/WIT-UAS-Dataset}.