 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFreeFix: Boosting 3D Gaussian Splatting via Fine-Tuning-Free Diffusion Models
Jan 28, 2026Neural Radiance Fields and 3D Gaussian Splatting have advanced novel view synthesis, yet still rely on dense inputs and often degrade at extrapolated views. Recent approaches leverage generative models, such as diffusion models, to provide additional supervision, but face a trade-off between generalization and fidelity: fine-tuning diffusion models for artifact removal improves fidelity but risks overfitting, while fine-tuning-free methods preserve generalization but often yield lower fidelity. We introduce FreeFix, a fine-tuning-free approach that pushes the boundary of this trade-off by enhancing extrapolated rendering with pretrained image diffusion models. We present an interleaved 2D-3D refinement strategy, showing that image diffusion models can be leveraged for consistent refinement without relying on costly video diffusion models. Furthermore, we take a closer look at the guidance signal for 2D refinement and propose a per-pixel confidence mask to identify uncertain regions for targeted improvement. Experiments across multiple datasets show that FreeFix improves multi-frame consistency and achieves performance comparable to or surpassing fine-tuning-based methods, while retaining strong generalization ability.
STEP3-VL-10B Technical Report
Jan 15, 2026We present STEP3-VL-10B, a lightweight open-source foundation model designed to redefine the trade-off between compact efficiency and frontier-level multimodal intelligence. STEP3-VL-10B is realized through two strategic shifts: first, a unified, fully unfrozen pre-training strategy on 1.2T multimodal tokens that integrates a language-aligned Perception Encoder with a Qwen3-8B decoder to establish intrinsic vision-language synergy; and second, a scaled post-training pipeline featuring over 1k iterations of reinforcement learning. Crucially, we implement Parallel Coordinated Reasoning (PaCoRe) to scale test-time compute, allocating resources to scalable perceptual reasoning that explores and synthesizes diverse visual hypotheses. Consequently, despite its compact 10B footprint, STEP3-VL-10B rivals or surpasses models 10$\times$-20$\times$ larger (e.g., GLM-4.6V-106B, Qwen3-VL-235B) and top-tier proprietary flagships like Gemini 2.5 Pro and Seed-1.5-VL. Delivering best-in-class performance, it records 92.2% on MMBench and 80.11% on MMMU, while excelling in complex reasoning with 94.43% on AIME2025 and 75.95% on MathVision. We release the full model suite to provide the community with a powerful, efficient, and reproducible baseline.
PaCoRe: Learning to Scale Test-Time Compute with Parallel Coordinated Reasoning
Jan 09, 2026We introduce Parallel Coordinated Reasoning (PaCoRe), a training-and-inference framework designed to overcome a central limitation of contemporary language models: their inability to scale test-time compute (TTC) far beyond sequential reasoning under a fixed context window. PaCoRe departs from the traditional sequential paradigm by driving TTC through massive parallel exploration coordinated via a message-passing architecture in multiple rounds. Each round launches many parallel reasoning trajectories, compacts their findings into context-bounded messages, and synthesizes these messages to guide the next round and ultimately produce the final answer. Trained end-to-end with large-scale, outcome-based reinforcement learning, the model masters the synthesis abilities required by PaCoRe and scales to multi-million-token effective TTC without exceeding context limits. The approach yields strong improvements across diverse domains, and notably pushes reasoning beyond frontier systems in mathematics: an 8B model reaches 94.5% on HMMT 2025, surpassing GPT-5's 93.2% by scaling effective TTC to roughly two million tokens. We open-source model checkpoints, training data, and the full inference pipeline to accelerate follow-up work.
Feature-based Inversion of 2.5D Controlled Source Electromagnetic Data using Generative Priors
Jan 05, 2026In this study, we investigate feature-based 2.5D controlled source marine electromagnetic (mCSEM) data inversion using generative priors. Two-and-half dimensional modeling using finite difference method (FDM) is adopted to compute the response of horizontal electric dipole (HED) excitation. Rather than using a neural network to approximate the entire inverse mapping in a black-box manner, we adopt a plug-andplay strategy in which a variational autoencoder (VAE) is used solely to learn prior information on conductivity distributions. During the inversion process, the conductivity model is iteratively updated using the Gauss Newton method, while the model space is constrained by projections onto the learned VAE decoder. This framework preserves explicit control over data misfit and enables flexible adaptation to different survey configurations. Numerical and field experiments demonstrate that the proposed approach effectively incorporates prior information, improves reconstruction accuracy, and exhibits good generalization performance.
Hazard-Responsive Digital Twin for Climate-Driven Urban Resilience and Equity
Oct 27, 2025Compounding climate hazards, such as wildfire-induced outages and urban heatwaves, challenge the stability and equity of cities. We present a Hazard-Responsive Digital Twin (H-RDT) that combines physics-informed neural network modeling, multimodal data fusion, and equity-aware risk analytics for urban-scale response. In a synthetic district with diverse building archetypes and populations, a simulated wildfire-outage-heatwave cascade shows that H-RDT maintains stable indoor temperature predictions (approximately 31 to 33 C) under partial sensor loss, reproducing outage-driven surges and recovery. The reinforcement learning based fusion module adaptively reweights IoT, UAV, and satellite inputs to sustain spatiotemporal coverage, while the equity-adjusted mapping isolates high-vulnerability clusters (schools, clinics, low-income housing). Prospective interventions, such as preemptive cooling-center activation and microgrid sharing, reduce population-weighted thermal risk by 11 to 13 percent, shrink the 95th-percentile (tail) risk by 7 to 17 percent, and cut overheating hours by up to 9 percent. Beyond the synthetic demonstration, the framework establishes a transferable foundation for real-city implementation, linking physical hazard modeling with social equity and decision intelligence. The H-RDT advances digital urban resilience toward adaptive, learning-based, and equity-centered decision support for climate adaptation.
Does Multimodality Improve Recommender Systems as Expected? A Critical Analysis and Future Directions
Aug 07, 2025



Multimodal recommendation systems are increasingly popular for their potential to improve performance by integrating diverse data types. However, the actual benefits of this integration remain unclear, raising questions about when and how it truly enhances recommendations. In this paper, we propose a structured evaluation framework to systematically assess multimodal recommendations across four dimensions: Comparative Efficiency, Recommendation Tasks, Recommendation Stages, and Multimodal Data Integration. We benchmark a set of reproducible multimodal models against strong traditional baselines and evaluate their performance on different platforms. Our findings show that multimodal data is particularly beneficial in sparse interaction scenarios and during the recall stage of recommendation pipelines. We also observe that the importance of each modality is task-specific, where text features are more useful in e-commerce and visual features are more effective in short-video recommendations. Additionally, we explore different integration strategies and model sizes, finding that Ensemble-Based Learning outperforms Fusion-Based Learning, and that larger models do not necessarily deliver better results. To deepen our understanding, we include case studies and review findings from other recommendation domains. Our work provides practical insights for building efficient and effective multimodal recommendation systems, emphasizing the need for thoughtful modality selection, integration strategies, and model design.
Step-Audio 2 Technical Report
Jul 24, 2025
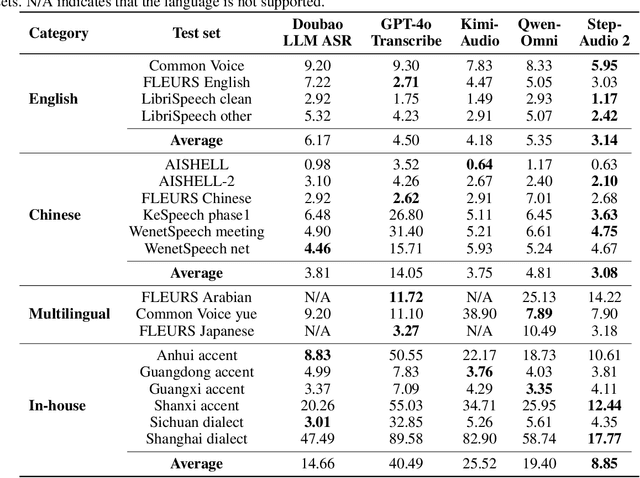

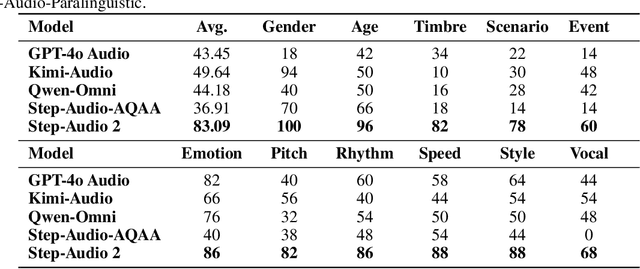
This paper presents Step-Audio 2, an end-to-end multi-modal large language model designed for industry-strength audio understanding and speech conversation. By integrating a latent audio encoder and reasoning-centric reinforcement learning (RL), Step-Audio 2 achieves promising performance in automatic speech recognition (ASR) and audio understanding. To facilitate genuine end-to-end speech conversation, Step-Audio 2 incorporates the generation of discrete audio tokens into language modeling, significantly enhancing its responsiveness to paralinguistic information such as speaking styles and emotions. To effectively leverage the rich textual and acoustic knowledge in real-world data, Step-Audio 2 integrates retrieval-augmented generation (RAG) and is able to call external tools such as web search to mitigate hallucination and audio search to switch timbres. Trained on millions of hours of speech and audio data, Step-Audio 2 delivers intelligence and expressiveness across diverse conversational scenarios. Evaluation results demonstrate that Step-Audio 2 achieves state-of-the-art performance on various audio understanding and conversational benchmarks compared to other open-source and commercial solutions. Please visit https://github.com/stepfun-ai/Step-Audio2 for more information.
Towards Depth Foundation Model: Recent Trends in Vision-Based Depth Estimation
Jul 15, 2025Depth estimation is a fundamental task in 3D computer vision, crucial for applications such as 3D reconstruction, free-viewpoint rendering, robotics, autonomous driving, and AR/VR technologies. Traditional methods relying on hardware sensors like LiDAR are often limited by high costs, low resolution, and environmental sensitivity, limiting their applicability in real-world scenarios. Recent advances in vision-based methods offer a promising alternative, yet they face challenges in generalization and stability due to either the low-capacity model architectures or the reliance on domain-specific and small-scale datasets. The emergence of scaling laws and foundation models in other domains has inspired the development of "depth foundation models": deep neural networks trained on large datasets with strong zero-shot generalization capabilities. This paper surveys the evolution of deep learning architectures and paradigms for depth estimation across the monocular, stereo, multi-view, and monocular video settings. We explore the potential of these models to address existing challenges and provide a comprehensive overview of large-scale datasets that can facilitate their development. By identifying key architectures and training strategies, we aim to highlight the path towards robust depth foundation models, offering insights into their future research and applications.
Step-Audio-AQAA: a Fully End-to-End Expressive Large Audio Language Model
Jun 10, 2025



Large Audio-Language Models (LALMs) have significantly advanced intelligent human-computer interaction, yet their reliance on text-based outputs limits their ability to generate natural speech responses directly, hindering seamless audio interactions. To address this, we introduce Step-Audio-AQAA, a fully end-to-end LALM designed for Audio Query-Audio Answer (AQAA) tasks. The model integrates a dual-codebook audio tokenizer for linguistic and semantic feature extraction, a 130-billion-parameter backbone LLM and a neural vocoder for high-fidelity speech synthesis. Our post-training approach employs interleaved token-output of text and audio to enhance semantic coherence and combines Direct Preference Optimization (DPO) with model merge to improve performance. Evaluations on the StepEval-Audio-360 benchmark demonstrate that Step-Audio-AQAA excels especially in speech control, outperforming the state-of-art LALMs in key areas. This work contributes a promising solution for end-to-end LALMs and highlights the critical role of token-based vocoder in enhancing overall performance for AQAA tasks.
Segmenting France Across Four Centuries
May 30, 2025Historical maps offer an invaluable perspective into territory evolution across past centuries--long before satellite or remote sensing technologies existed. Deep learning methods have shown promising results in segmenting historical maps, but publicly available datasets typically focus on a single map type or period, require extensive and costly annotations, and are not suited for nationwide, long-term analyses. In this paper, we introduce a new dataset of historical maps tailored for analyzing large-scale, long-term land use and land cover evolution with limited annotations. Spanning metropolitan France (548,305 km^2), our dataset contains three map collections from the 18th, 19th, and 20th centuries. We provide both comprehensive modern labels and 22,878 km^2 of manually annotated historical labels for the 18th and 19th century maps. Our dataset illustrates the complexity of the segmentation task, featuring stylistic inconsistencies, interpretive ambiguities, and significant landscape changes (e.g., marshlands disappearing in favor of forests). We assess the difficulty of these challenges by benchmarking three approaches: a fully-supervised model trained with historical labels, and two weakly-supervised models that rely only on modern annotations. The latter either use the modern labels directly or first perform image-to-image translation to address the stylistic gap between historical and contemporary maps. Finally, we discuss how these methods can support long-term environment monitoring, offering insights into centuries of landscape transformation. Our official project repository is publicly available at https://github.com/Archiel19/FRAx4.git.