 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRainDiff: End-to-end Precipitation Nowcasting Via Token-wise Attention Diffusion
Oct 16, 2025Precipitation nowcasting, predicting future radar echo sequences from current observations, is a critical yet challenging task due to the inherently chaotic and tightly coupled spatio-temporal dynamics of the atmosphere. While recent advances in diffusion-based models attempt to capture both large-scale motion and fine-grained stochastic variability, they often suffer from scalability issues: latent-space approaches require a separately trained autoencoder, adding complexity and limiting generalization, while pixel-space approaches are computationally intensive and often omit attention mechanisms, reducing their ability to model long-range spatio-temporal dependencies. To address these limitations, we propose a Token-wise Attention integrated into not only the U-Net diffusion model but also the spatio-temporal encoder that dynamically captures multi-scale spatial interactions and temporal evolution. Unlike prior approaches, our method natively integrates attention into the architecture without incurring the high resource cost typical of pixel-space diffusion, thereby eliminating the need for separate latent modules. Our extensive experiments and visual evaluations across diverse datasets demonstrate that the proposed method significantly outperforms state-of-the-art approaches, yielding superior local fidelity, generalization, and robustness in complex precipitation forecasting scenarios.
MATRIX: Multimodal Agent Tuning for Robust Tool-Use Reasoning
Oct 09, 2025Vision language models (VLMs) are increasingly deployed as controllers with access to external tools for complex reasoning and decision-making, yet their effectiveness remains limited by the scarcity of high-quality multimodal trajectories and the cost of manual annotation. We address this challenge with a vision-centric agent tuning framework that automatically synthesizes multimodal trajectories, generates step-wise preference pairs, and trains a VLM controller for robust tool-use reasoning. Our pipeline first constructs M-TRACE, a large-scale dataset of 28.5K multimodal tasks with 177K verified trajectories, enabling imitation-based trajectory tuning. Building on this, we develop MATRIX Agent, a controller finetuned on M-TRACE for step-wise tool reasoning. To achieve finer alignment, we further introduce Pref-X, a set of 11K automatically generated preference pairs, and optimize MATRIX on it via step-wise preference learning. Across three benchmarks, Agent-X, GTA, and GAIA, MATRIX consistently surpasses both open- and closed-source VLMs, demonstrating scalable and effective multimodal tool use. Our data and code is avaliable at https://github.com/mbzuai-oryx/MATRIX.
How Good are Foundation Models in Step-by-Step Embodied Reasoning?
Sep 18, 2025



Embodied agents operating in the physical world must make decisions that are not only effective but also safe, spatially coherent, and grounded in context. While recent advances in large multimodal models (LMMs) have shown promising capabilities in visual understanding and language generation, their ability to perform structured reasoning for real-world embodied tasks remains underexplored. In this work, we aim to understand how well foundation models can perform step-by-step reasoning in embodied environments. To this end, we propose the Foundation Model Embodied Reasoning (FoMER) benchmark, designed to evaluate the reasoning capabilities of LMMs in complex embodied decision-making scenarios. Our benchmark spans a diverse set of tasks that require agents to interpret multimodal observations, reason about physical constraints and safety, and generate valid next actions in natural language. We present (i) a large-scale, curated suite of embodied reasoning tasks, (ii) a novel evaluation framework that disentangles perceptual grounding from action reasoning, and (iii) empirical analysis of several leading LMMs under this setting. Our benchmark includes over 1.1k samples with detailed step-by-step reasoning across 10 tasks and 8 embodiments, covering three different robot types. Our results highlight both the potential and current limitations of LMMs in embodied reasoning, pointing towards key challenges and opportunities for future research in robot intelligence. Our data and code will be made publicly available.
Beyond Simple Edits: Composed Video Retrieval with Dense Modifications
Aug 19, 2025Composed video retrieval is a challenging task that strives to retrieve a target video based on a query video and a textual description detailing specific modifications. Standard retrieval frameworks typically struggle to handle the complexity of fine-grained compositional queries and variations in temporal understanding limiting their retrieval ability in the fine-grained setting. To address this issue, we introduce a novel dataset that captures both fine-grained and composed actions across diverse video segments, enabling more detailed compositional changes in retrieved video content. The proposed dataset, named Dense-WebVid-CoVR, consists of 1.6 million samples with dense modification text that is around seven times more than its existing counterpart. We further develop a new model that integrates visual and textual information through Cross-Attention (CA) fusion using grounded text encoder, enabling precise alignment between dense query modifications and target videos. The proposed model achieves state-of-the-art results surpassing existing methods on all metrics. Notably, it achieves 71.3\% Recall@1 in visual+text setting and outperforms the state-of-the-art by 3.4\%, highlighting its efficacy in terms of leveraging detailed video descriptions and dense modification texts. Our proposed dataset, code, and model are available at :https://github.com/OmkarThawakar/BSE-CoVR
Hierarchical Visual Prompt Learning for Continual Video Instance Segmentation
Aug 12, 2025
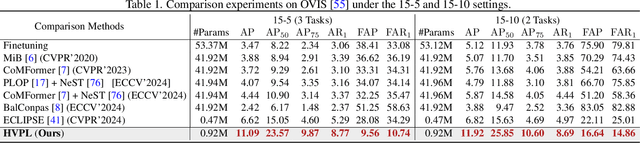


Video instance segmentation (VIS) has gained significant attention for its capability in tracking and segmenting object instances across video frames. However, most of the existing VIS approaches unrealistically assume that the categories of object instances remain fixed over time. Moreover, they experience catastrophic forgetting of old classes when required to continuously learn object instances belonging to new categories. To resolve these challenges, we develop a novel Hierarchical Visual Prompt Learning (HVPL) model that overcomes catastrophic forgetting of previous categories from both frame-level and video-level perspectives. Specifically, to mitigate forgetting at the frame level, we devise a task-specific frame prompt and an orthogonal gradient correction (OGC) module. The OGC module helps the frame prompt encode task-specific global instance information for new classes in each individual frame by projecting its gradients onto the orthogonal feature space of old classes. Furthermore, to address forgetting at the video level, we design a task-specific video prompt and a video context decoder. This decoder first embeds structural inter-class relationships across frames into the frame prompt features, and then propagates task-specific global video contexts from the frame prompt features to the video prompt. Through rigorous comparisons, our HVPL model proves to be more effective than baseline approaches. The code is available at https://github.com/JiahuaDong/HVPL.
RAGNet: Large-scale Reasoning-based Affordance Segmentation Benchmark towards General Grasping
Jul 31, 2025



General robotic grasping systems require accurate object affordance perception in diverse open-world scenarios following human instructions. However, current studies suffer from the problem of lacking reasoning-based large-scale affordance prediction data, leading to considerable concern about open-world effectiveness. To address this limitation, we build a large-scale grasping-oriented affordance segmentation benchmark with human-like instructions, named RAGNet. It contains 273k images, 180 categories, and 26k reasoning instructions. The images cover diverse embodied data domains, such as wild, robot, ego-centric, and even simulation data. They are carefully annotated with an affordance map, while the difficulty of language instructions is largely increased by removing their category name and only providing functional descriptions. Furthermore, we propose a comprehensive affordance-based grasping framework, named AffordanceNet, which consists of a VLM pre-trained on our massive affordance data and a grasping network that conditions an affordance map to grasp the target. Extensive experiments on affordance segmentation benchmarks and real-robot manipulation tasks show that our model has a powerful open-world generalization ability. Our data and code is available at https://github.com/wudongming97/AffordanceNet.
AI in Agriculture: A Survey of Deep Learning Techniques for Crops, Fisheries and Livestock
Jul 29, 2025



Crops, fisheries and livestock form the backbone of global food production, essential to feed the ever-growing global population. However, these sectors face considerable challenges, including climate variability, resource limitations, and the need for sustainable management. Addressing these issues requires efficient, accurate, and scalable technological solutions, highlighting the importance of artificial intelligence (AI). This survey presents a systematic and thorough review of more than 200 research works covering conventional machine learning approaches, advanced deep learning techniques (e.g., vision transformers), and recent vision-language foundation models (e.g., CLIP) in the agriculture domain, focusing on diverse tasks such as crop disease detection, livestock health management, and aquatic species monitoring. We further cover major implementation challenges such as data variability and experimental aspects: datasets, performance evaluation metrics, and geographical focus. We finish the survey by discussing potential open research directions emphasizing the need for multimodal data integration, efficient edge-device deployment, and domain-adaptable AI models for diverse farming environments. Rapid growth of evolving developments in this field can be actively tracked on our project page: https://github.com/umair1221/AI-in-Agriculture
TAViS: Text-bridged Audio-Visual Segmentation with Foundation Models
Jun 13, 2025Audio-Visual Segmentation (AVS) faces a fundamental challenge of effectively aligning audio and visual modalities. While recent approaches leverage foundation models to address data scarcity, they often rely on single-modality knowledge or combine foundation models in an off-the-shelf manner, failing to address the cross-modal alignment challenge. In this paper, we present TAViS, a novel framework that \textbf{couples} the knowledge of multimodal foundation models (ImageBind) for cross-modal alignment and a segmentation foundation model (SAM2) for precise segmentation. However, effectively combining these models poses two key challenges: the difficulty in transferring the knowledge between SAM2 and ImageBind due to their different feature spaces, and the insufficiency of using only segmentation loss for supervision. To address these challenges, we introduce a text-bridged design with two key components: (1) a text-bridged hybrid prompting mechanism where pseudo text provides class prototype information while retaining modality-specific details from both audio and visual inputs, and (2) an alignment supervision strategy that leverages text as a bridge to align shared semantic concepts within audio-visual modalities. Our approach achieves superior performance on single-source, multi-source, semantic datasets, and excels in zero-shot settings.
A Culturally-diverse Multilingual Multimodal Video Benchmark & Model
Jun 08, 2025Large multimodal models (LMMs) have recently gained attention due to their effectiveness to understand and generate descriptions of visual content. Most existing LMMs are in English language. While few recent works explore multilingual image LMMs, to the best of our knowledge, moving beyond the English language for cultural and linguistic inclusivity is yet to be investigated in the context of video LMMs. In pursuit of more inclusive video LMMs, we introduce a multilingual Video LMM benchmark, named ViMUL-Bench, to evaluate Video LMMs across 14 languages, including both low- and high-resource languages: English, Chinese, Spanish, French, German, Hindi, Arabic, Russian, Bengali, Urdu, Sinhala, Tamil, Swedish, and Japanese. Our ViMUL-Bench is designed to rigorously test video LMMs across 15 categories including eight culturally diverse categories, ranging from lifestyles and festivals to foods and rituals and from local landmarks to prominent cultural personalities. ViMUL-Bench comprises both open-ended (short and long-form) and multiple-choice questions spanning various video durations (short, medium, and long) with 8k samples that are manually verified by native language speakers. In addition, we also introduce a machine translated multilingual video training set comprising 1.2 million samples and develop a simple multilingual video LMM, named ViMUL, that is shown to provide a better tradeoff between high-and low-resource languages for video understanding. We hope our ViMUL-Bench and multilingual video LMM along with a large-scale multilingual video training set will help ease future research in developing cultural and linguistic inclusive multilingual video LMMs. Our proposed benchmark, video LMM and training data will be publicly released at https://mbzuai-oryx.github.io/ViMUL/.
TerraFM: A Scalable Foundation Model for Unified Multisensor Earth Observation
Jun 06, 2025Modern Earth observation (EO) increasingly leverages deep learning to harness the scale and diversity of satellite imagery across sensors and regions. While recent foundation models have demonstrated promising generalization across EO tasks, many remain limited by the scale, geographical coverage, and spectral diversity of their training data, factors critical for learning globally transferable representations. In this work, we introduce TerraFM, a scalable self-supervised learning model that leverages globally distributed Sentinel-1 and Sentinel-2 imagery, combined with large spatial tiles and land-cover aware sampling to enrich spatial and semantic coverage. By treating sensing modalities as natural augmentations in our self-supervised approach, we unify radar and optical inputs via modality-specific patch embeddings and adaptive cross-attention fusion. Our training strategy integrates local-global contrastive learning and introduces a dual-centering mechanism that incorporates class-frequency-aware regularization to address long-tailed distributions in land cover.TerraFM achieves strong generalization on both classification and segmentation tasks, outperforming prior models on GEO-Bench and Copernicus-Bench. Our code and pretrained models are publicly available at: https://github.com/mbzuai-oryx/TerraFM .