 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAccelerated Policy Learning with Parallel Differentiable Simulation
Apr 14, 2022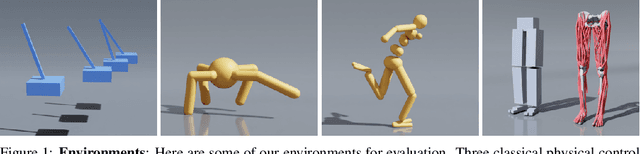
Deep reinforcement learning can generate complex control policies, but requires large amounts of training data to work effectively. Recent work has attempted to address this issue by leveraging differentiable simulators. However, inherent problems such as local minima and exploding/vanishing numerical gradients prevent these methods from being generally applied to control tasks with complex contact-rich dynamics, such as humanoid locomotion in classical RL benchmarks. In this work we present a high-performance differentiable simulator and a new policy learning algorithm (SHAC) that can effectively leverage simulation gradients, even in the presence of non-smoothness. Our learning algorithm alleviates problems with local minima through a smooth critic function, avoids vanishing/exploding gradients through a truncated learning window, and allows many physical environments to be run in parallel. We evaluate our method on classical RL control tasks, and show substantial improvements in sample efficiency and wall-clock time over state-of-the-art RL and differentiable simulation-based algorithms. In addition, we demonstrate the scalability of our method by applying it to the challenging high-dimensional problem of muscle-actuated locomotion with a large action space, achieving a greater than 17x reduction in training time over the best-performing established RL algorithm.
Adaptive Model Predictive Control by Learning Classifiers
Apr 05, 2022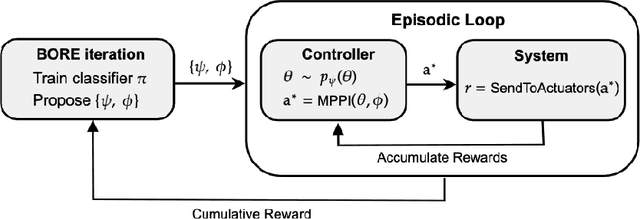

Stochastic model predictive control has been a successful and robust control framework for many robotics tasks where the system dynamics model is slightly inaccurate or in the presence of environment disturbances. Despite the successes, it is still unclear how to best adjust control parameters to the current task in the presence of model parameter uncertainty and heteroscedastic noise. In this paper, we propose an adaptive MPC variant that automatically estimates control and model parameters by leveraging ideas from Bayesian optimisation (BO) and the classical expected improvement acquisition function. We leverage recent results showing that BO can be reformulated via density ratio estimation, which can be efficiently approximated by simply learning a classifier. This is then integrated into a model predictive path integral control framework yielding robust controllers for a variety of challenging robotics tasks. We demonstrate the approach on classical control problems under model uncertainty and robotics manipulation tasks.
DiSECt: A Differentiable Simulator for Parameter Inference and Control in Robotic Cutting
Mar 19, 2022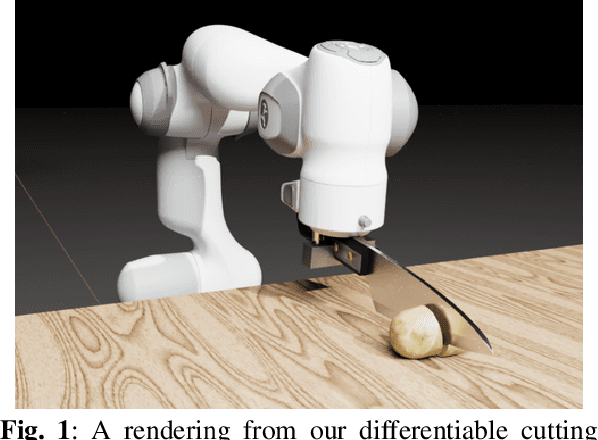
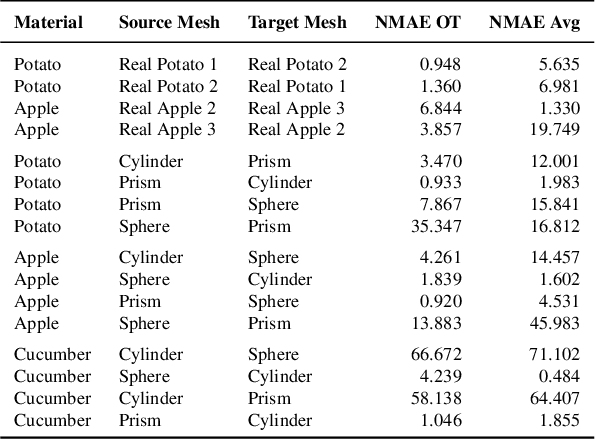
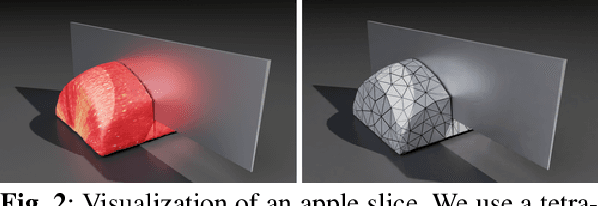
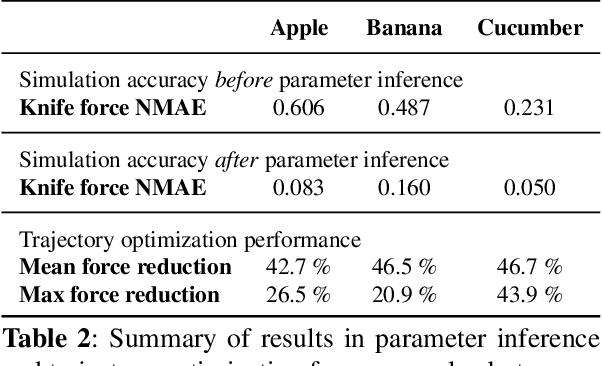
Robotic cutting of soft materials is critical for applications such as food processing, household automation, and surgical manipulation. As in other areas of robotics, simulators can facilitate controller verification, policy learning, and dataset generation. Moreover, differentiable simulators can enable gradient-based optimization, which is invaluable for calibrating simulation parameters and optimizing controllers. In this work, we present DiSECt: the first differentiable simulator for cutting soft materials. The simulator augments the finite element method (FEM) with a continuous contact model based on signed distance fields (SDF), as well as a continuous damage model that inserts springs on opposite sides of the cutting plane and allows them to weaken until zero stiffness, enabling crack formation. Through various experiments, we evaluate the performance of the simulator. We first show that the simulator can be calibrated to match resultant forces and deformation fields from a state-of-the-art commercial solver and real-world cutting datasets, with generality across cutting velocities and object instances. We then show that Bayesian inference can be performed efficiently by leveraging the differentiability of the simulator, estimating posteriors over hundreds of parameters in a fraction of the time of derivative-free methods. Next, we illustrate that control parameters in the simulation can be optimized to minimize cutting forces via lateral slicing motions. Finally, we conduct experiments on a real robot arm equipped with a slicing knife to infer simulation parameters from force measurements. By optimizing the slicing motion of the knife, we show on fruit cutting scenarios that the average knife force can be reduced by more than 40% compared to a vertical cutting motion. We publish code and additional materials on our project website at https://diff-cutting-sim.github.io.
Bayesian Optimisation for Robust Model Predictive Control under Model Parameter Uncertainty
Mar 02, 2022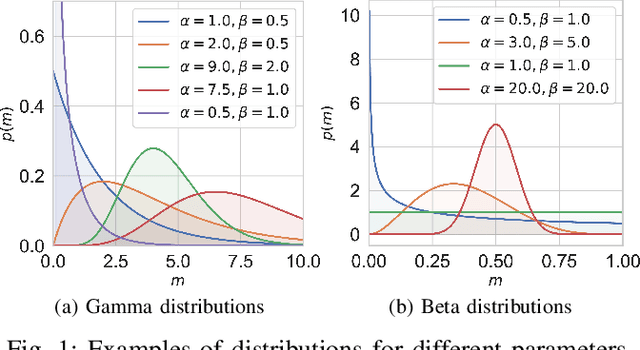
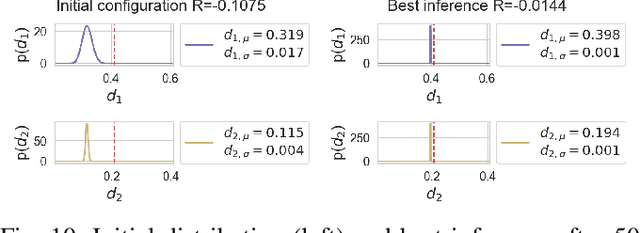
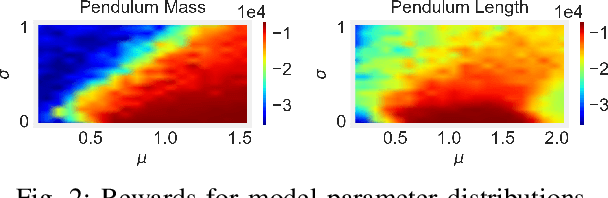

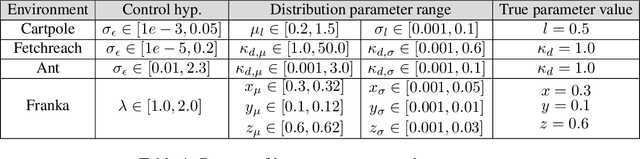
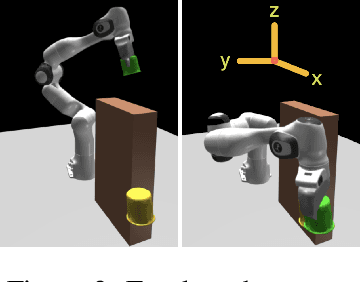
We propose an adaptive optimisation approach for tuning stochastic model predictive control (MPC) hyper-parameters while jointly estimating probability distributions of the transition model parameters based on performance rewards. In particular, we develop a Bayesian optimisation (BO) algorithm with a heteroscedastic noise model to deal with varying noise across the MPC hyper-parameter and dynamics model parameter spaces. Typical homoscedastic noise models are unrealistic for tuning MPC since stochastic controllers are inherently noisy, and the level of noise is affected by their hyper-parameter settings. We evaluate the proposed optimisation algorithm in simulated control and robotics tasks where we jointly infer control and dynamics parameters. Experimental results demonstrate that our approach leads to higher cumulative rewards and more stable controllers.
L4KDE: Learning for KinoDynamic Tree Expansion
Mar 02, 2022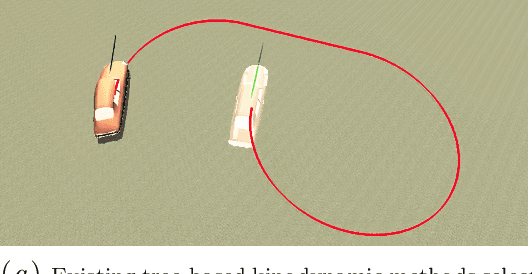
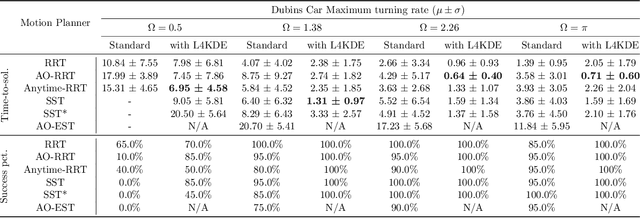
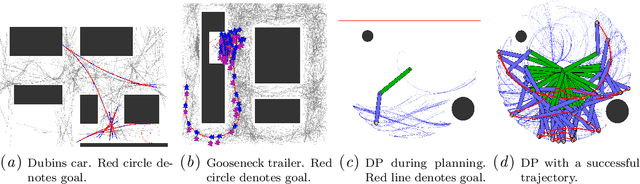
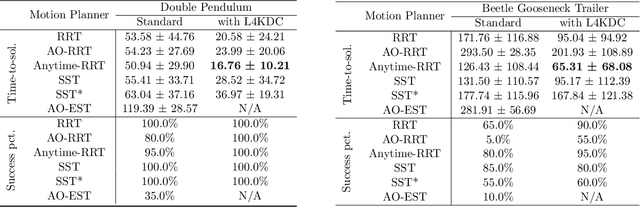
We present the Learning for KinoDynamic Tree Expansion (L4KDE) method for kinodynamic planning. Tree-based planning approaches, such as rapidly exploring random tree (RRT), are the dominant approach to finding globally optimal plans in continuous state-space motion planning. Central to these approaches is tree-expansion, the procedure in which new nodes are added into an ever-expanding tree. We study the kinodynamic variants of tree-based planning, where we have known system dynamics and kinematic constraints. In the interest of quickly selecting nodes to connect newly sampled coordinates, existing methods typically cannot optimise to find nodes which have low cost to transition to sampled coordinates. Instead they use metrics like Euclidean distance between coordinates as a heuristic for selecting candidate nodes to connect to the search tree. We propose L4KDE to address this issue. L4KDE uses a neural network to predict transition costs between queried states, which can be efficiently computed in batch, providing much higher quality estimates of transition cost compared to commonly used heuristics while maintaining almost-surely asymptotic optimality guarantee. We empirically demonstrate the significant performance improvement provided by L4KDE on a variety of challenging system dynamics, with the ability to generalise across different instances of the same model class, and in conjunction with a suite of modern tree-based motion planners.
Stein Particle Filter for Nonlinear, Non-Gaussian State Estimation
Feb 09, 2022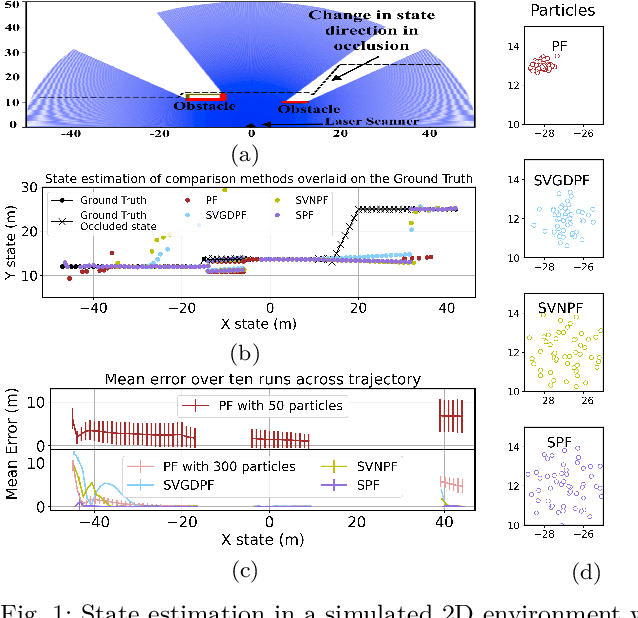
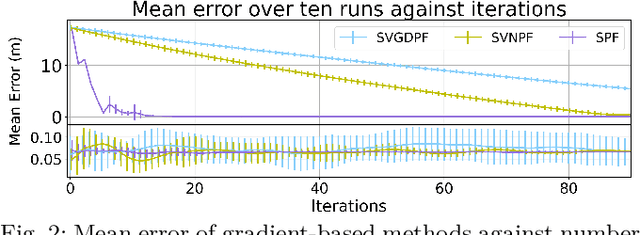
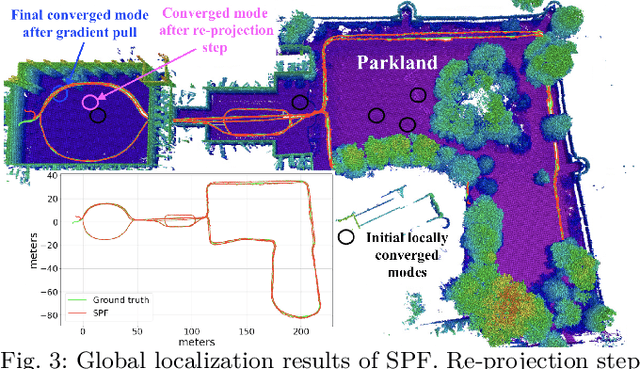
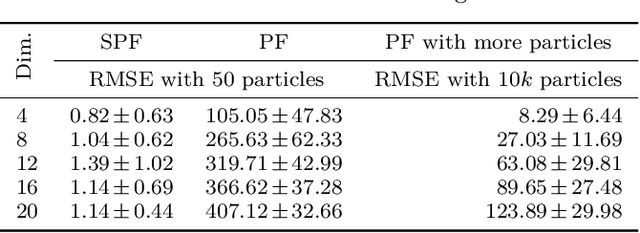
Estimation of a dynamical system's latent state subject to sensor noise and model inaccuracies remains a critical yet difficult problem in robotics. While Kalman filters provide the optimal solution in the least squared sense for linear and Gaussian noise problems, the general nonlinear and non-Gaussian noise case is significantly more complicated, typically relying on sampling strategies that are limited to low-dimensional state spaces. In this paper we devise a general inference procedure for filtering of nonlinear, non-Gaussian dynamical systems that exploits the differentiability of both the update and prediction models to scale to higher dimensional spaces. Our method, Stein particle filter, can be seen as a deterministic flow of particles, embedded in a reproducing kernel Hilbert space, from an initial state to the desirable posterior. The particles evolve jointly to conform to a posterior approximation while interacting with each other through a repulsive force. We evaluate the method in simulation and in complex localization tasks while comparing it to sequential Monte Carlo solutions.
* 8 pages, 3 figures, Robotics and Automation Letters
A Bayesian Treatment of Real-to-Sim for Deformable Object Manipulation
Dec 09, 2021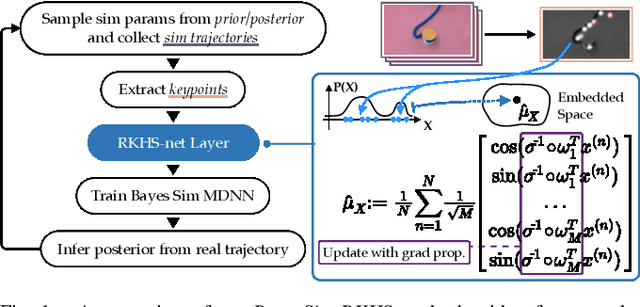
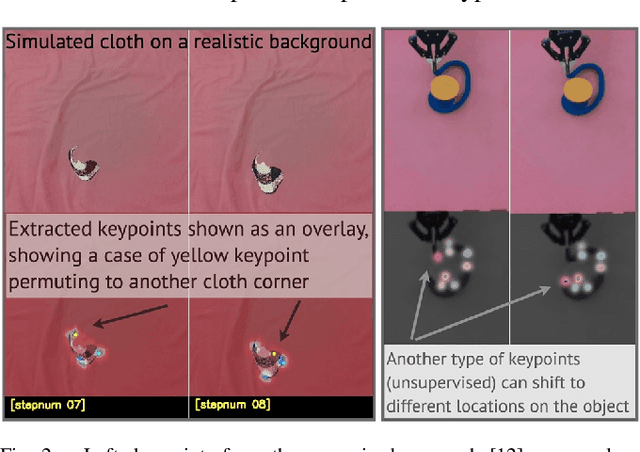
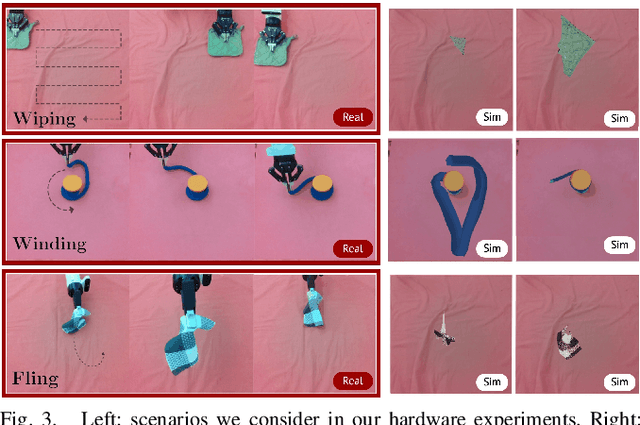
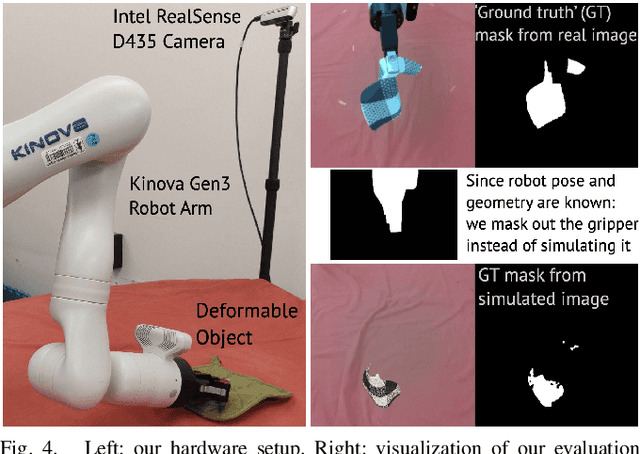
Deformable object manipulation remains a challenging task in robotics research. Conventional techniques for parameter inference and state estimation typically rely on a precise definition of the state space and its dynamics. While this is appropriate for rigid objects and robot states, it is challenging to define the state space of a deformable object and how it evolves in time. In this work, we pose the problem of inferring physical parameters of deformable objects as a probabilistic inference task defined with a simulator. We propose a novel methodology for extracting state information from image sequences via a technique to represent the state of a deformable object as a distribution embedding. This allows to incorporate noisy state observations directly into modern Bayesian simulation-based inference tools in a principled manner. Our experiments confirm that we can estimate posterior distributions of physical properties, such as elasticity, friction and scale of highly deformable objects, such as cloth and ropes. Overall, our method addresses the real-to-sim problem probabilistically and helps to better represent the evolution of the state of deformable objects.
Robot Learning from Randomized Simulations: A Review
Nov 01, 2021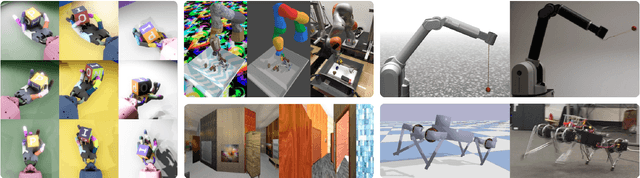

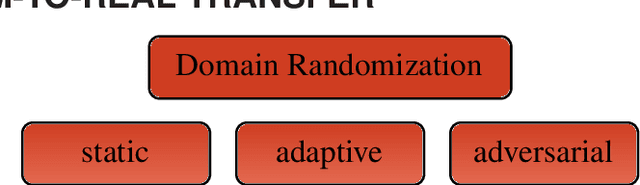
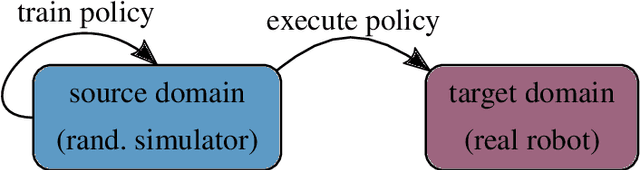
The rise of deep learning has caused a paradigm shift in robotics research, favoring methods that require large amounts of data. It is prohibitively expensive to generate such data sets on a physical platform. Therefore, state-of-the-art approaches learn in simulation where data generation is fast as well as inexpensive and subsequently transfer the knowledge to the real robot (sim-to-real). Despite becoming increasingly realistic, all simulators are by construction based on models, hence inevitably imperfect. This raises the question of how simulators can be modified to facilitate learning robot control policies and overcome the mismatch between simulation and reality, often called the 'reality gap'. We provide a comprehensive review of sim-to-real research for robotics, focusing on a technique named 'domain randomization' which is a method for learning from randomized simulations.
Rapid Replanning in Consecutive Pick-and-Place Tasks with Lazy Experience Graph
Sep 21, 2021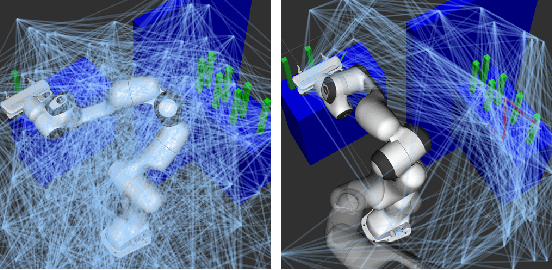
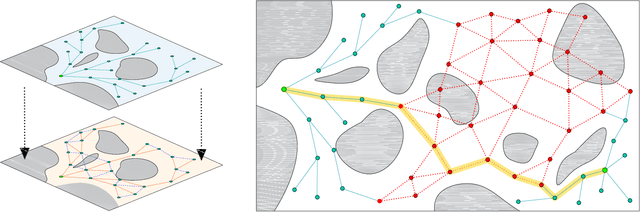
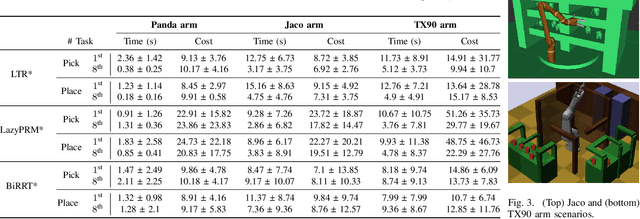
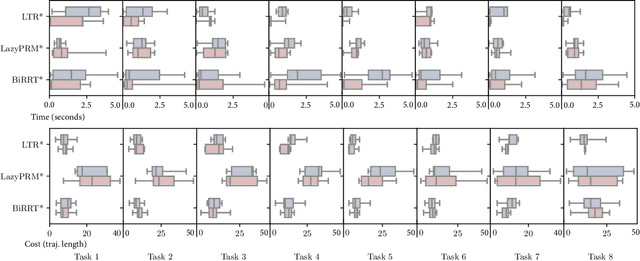
In an environment where a manipulator needs to execute multiple pick-and-place tasks, the act of object manoeuvre will change the underlying configuration space, which in turn affects all subsequent tasks. Previously free configurations might now be occupied by the newly placed objects, and previously occupied space might now open up new paths. We propose Lazy Tree-based Replanner (LTR*) -- a novel hybrid planner that inherits the rapid planning nature of existing anytime incremental sampling-based planners, and at the same time allows subsequent tasks to leverage prior experience via a lazy experience graph. Previous experience is summarised in a lazy graph structure, and LTR* is formulated such that it is robust and beneficial regardless of the extent of changes in the workspace. Our hybrid approach attains a faster speed in obtaining an initial solution than existing roadmap-based planners and often with a lower cost in trajectory length. Subsequent tasks can utilise the lazy experience graph to speed up finding a solution and take advantage of the optimised graph to minimise the cost objective. We provide rigorous proofs of probabilistic completeness and asymptotic optimal guarantees. Experimentally, we show that in repeated pick-and-place tasks, LTR* attains a high gain in performance when planning for subsequent tasks.
Probabilistic Inference of Simulation Parameters via Parallel Differentiable Simulation
Sep 18, 2021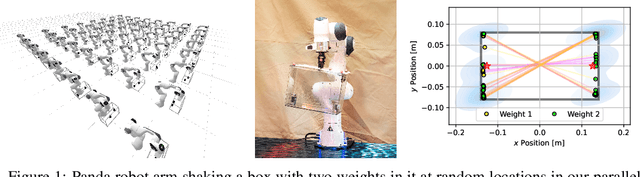

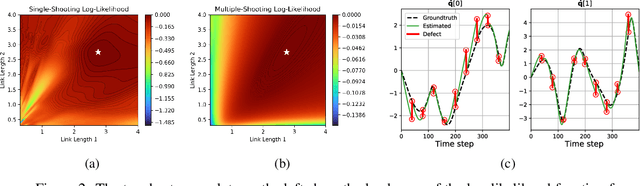
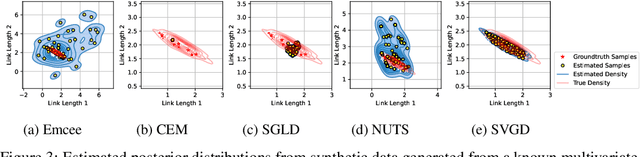
To accurately reproduce measurements from the real world, simulators need to have an adequate model of the physical system and require the parameters of the model be identified. We address the latter problem of estimating parameters through a Bayesian inference approach that approximates a posterior distribution over simulation parameters given real sensor measurements. By extending the commonly used Gaussian likelihood model for trajectories via the multiple-shooting formulation, our chosen particle-based inference algorithm Stein Variational Gradient Descent is able to identify highly nonlinear, underactuated systems. We leverage GPU code generation and differentiable simulation to evaluate the likelihood and its gradient for many particles in parallel. Our algorithm infers non-parametric distributions over simulation parameters more accurately than comparable baselines and handles constraints over parameters efficiently through gradient-based optimization. We evaluate estimation performance on several physical experiments. On an underactuated mechanism where a 7-DOF robot arm excites an object with an unknown mass configuration, we demonstrate how our inference technique can identify symmetries between the parameters and provide highly accurate predictions. Project website: https://uscresl.github.io/prob-diff-sim