 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Data-Driven Approach to Synthesizing Dynamics-Aware Trajectories for Underactuated Robotic Systems
Jul 25, 2023



We consider joint trajectory generation and tracking control for under-actuated robotic systems. A common solution is to use a layered control architecture, where the top layer uses a simplified model of system dynamics for trajectory generation, and the low layer ensures approximate tracking of this trajectory via feedback control. While such layered control architectures are standard and work well in practice, selecting the simplified model used for trajectory generation typically relies on engineering intuition and experience. In this paper, we propose an alternative data-driven approach to dynamics-aware trajectory generation. We show that a suitable augmented Lagrangian reformulation of a global nonlinear optimal control problem results in a layered decomposition of the overall problem into trajectory planning and feedback control layers. Crucially, the resulting trajectory optimization is dynamics-aware, in that, it is modified with a tracking penalty regularizer encoding the dynamic feasibility of the generated trajectory. We show that this tracking penalty regularizer can be learned from system rollouts for independently-designed low layer feedback control policies, and instantiate our framework in the context of a unicycle and a quadrotor control problem in simulation. Further, we show that our approach handles the sim-to-real gap through experiments on the quadrotor hardware platform without any additional training. For both the synthetic unicycle example and the quadrotor system, our framework shows significant improvements in both computation time and dynamic feasibility in simulation and hardware experiments.
SEER: Safe Efficient Exploration for Aerial Robots using Learning to Predict Information Gain
Sep 22, 2022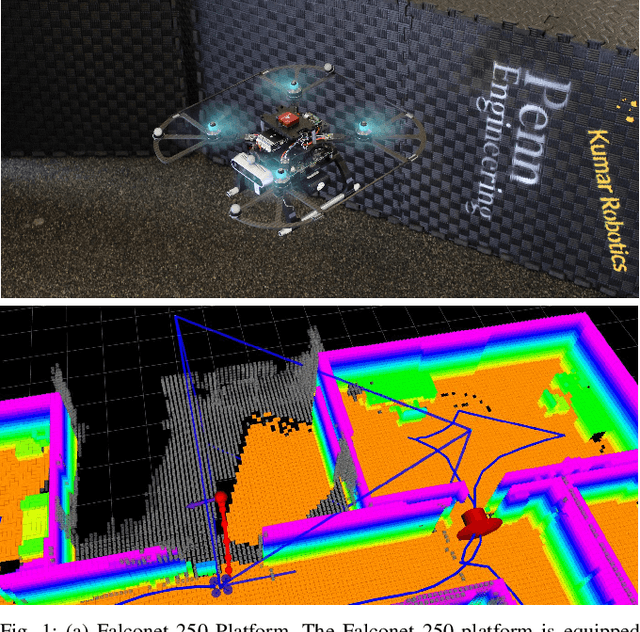
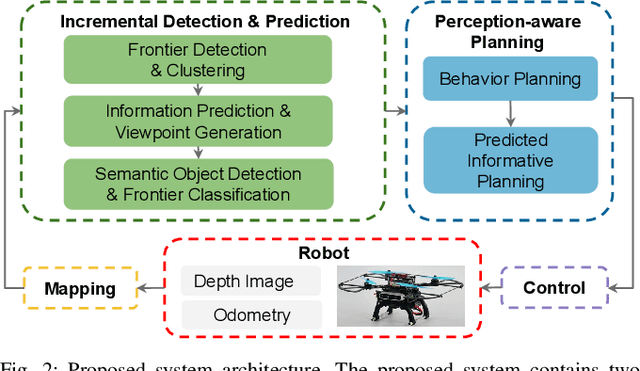
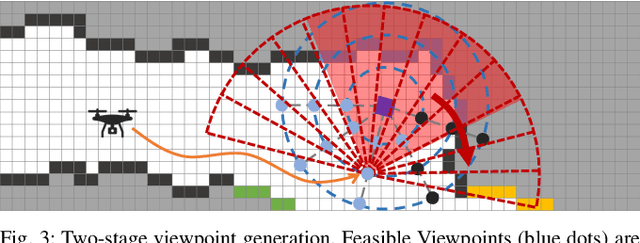
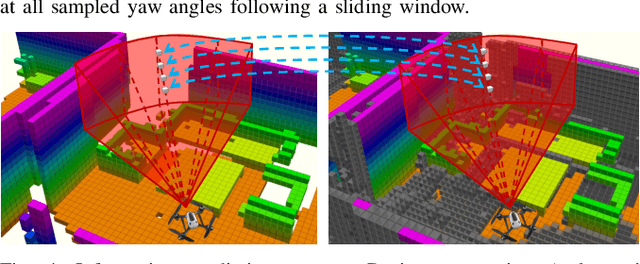
We address the problem of efficient 3-D exploration in indoor environments for micro aerial vehicles with limited sensing capabilities and payload/power constraints. We develop an indoor exploration framework that uses learning to predict the occupancy of unseen areas, extracts semantic features, samples viewpoints to predict information gains for different exploration goals, and plans informative trajectories to enable safe and smart exploration. Extensive experimentation in simulated and real-world environments shows the proposed approach outperforms the state-of-the-art exploration framework by 24% in terms of the total path length in a structured indoor environment and with a higher success rate during exploration.
Design and Deployment of an Autonomous Unmanned Ground Vehicle for Urban Firefighting Scenarios
Jul 08, 2021
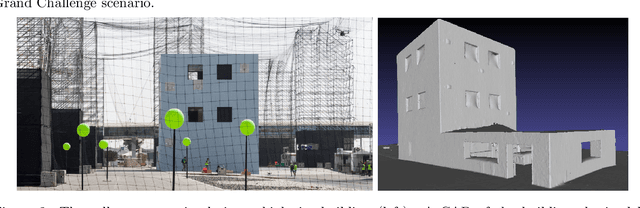
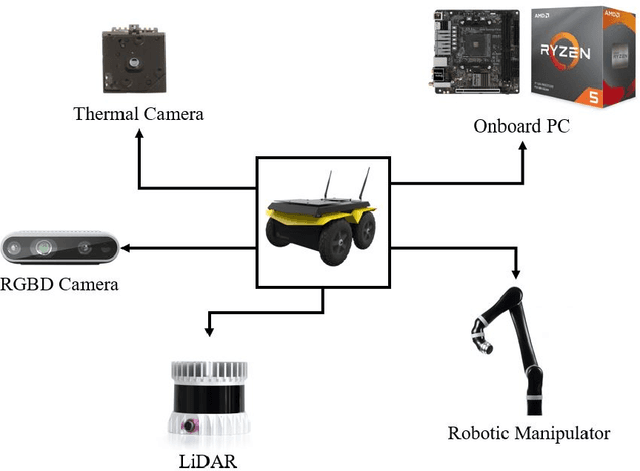
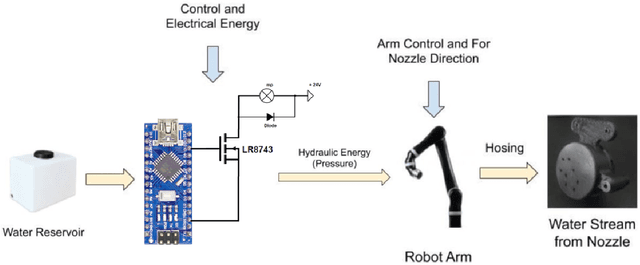
Autonomous mobile robots have the potential to solve missions that are either too complex or dangerous to be accomplished by humans. In this paper, we address the design and autonomous deployment of a ground vehicle equipped with a robotic arm for urban firefighting scenarios. We describe the hardware design and algorithm approaches for autonomous navigation, planning, fire source identification and abatement in unstructured urban scenarios. The approach employs on-board sensors for autonomous navigation and thermal camera information for source identification. A custom electro{mechanical pump is responsible to eject water for fire abatement. The proposed approach is validated through several experiments, where we show the ability to identify and abate a sample heat source in a building. The whole system was developed and deployed during the Mohamed Bin Zayed International Robotics Challenge (MBZIRC) 2020, for Challenge No. 3 Fire Fighting Inside a High-Rise Building and during the Grand Challenge where our approach scored the highest number of points among all UGV solutions and was instrumental to win the first place.
Mobile Manipulator for Autonomous Localization, Grasping and Precise Placement of Construction Material in a Semi-structured Environment
Nov 16, 2020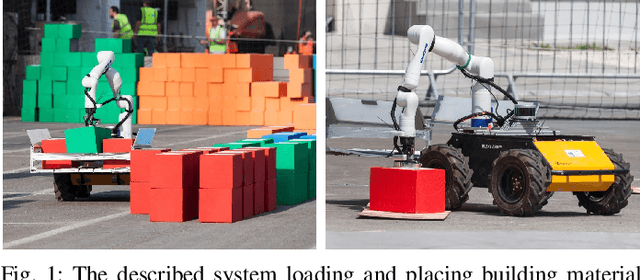
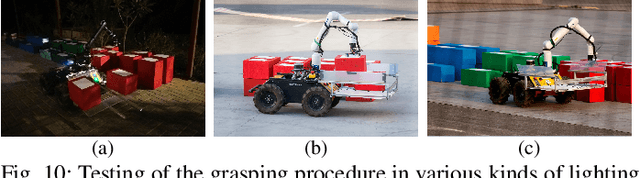
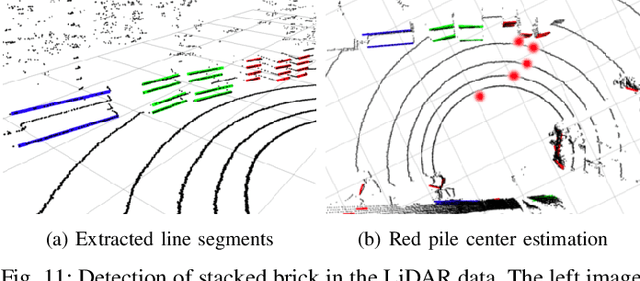
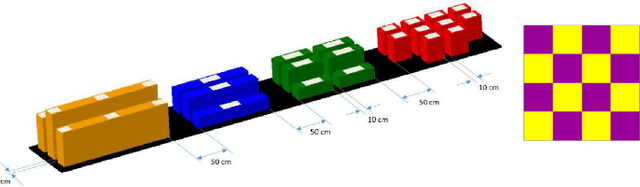
Mobile manipulators have the potential to revolutionize modern agriculture, logistics and manufacturing. In this work, we present the design of a ground-based mobile manipulator for automated structure assembly. The proposed system is capable of autonomous localization, grasping, transportation and deployment of construction material in a semi-structured environment. Special effort was put into making the system invariant to lighting changes, and not reliant on external positioning systems. Therefore, the presented system is self-contained and capable of operating in outdoor and indoor conditions alike. Finally, we present means to extend the perceptive radius of the vehicle by using it in cooperation with an autonomous drone, which provides aerial reconnaissance. Performance of the proposed system has been evaluated in a series of experiments conducted in real-world conditions.
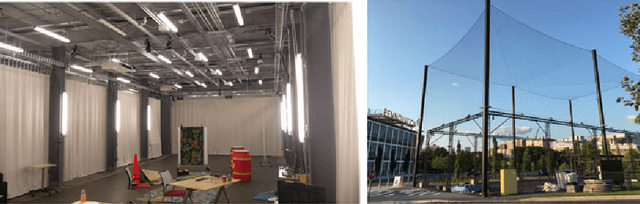
PennSyn2Real: Training Object Recognition Models without Human Labeling
Oct 16, 2020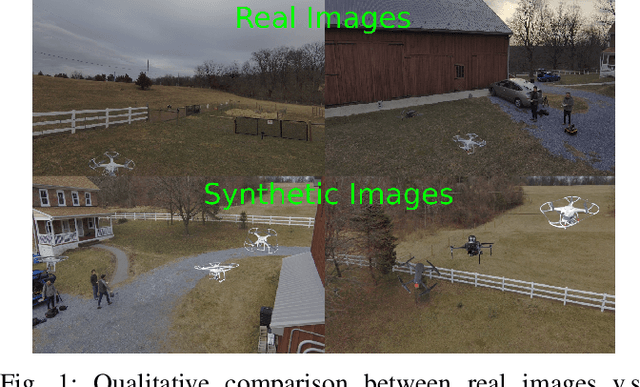

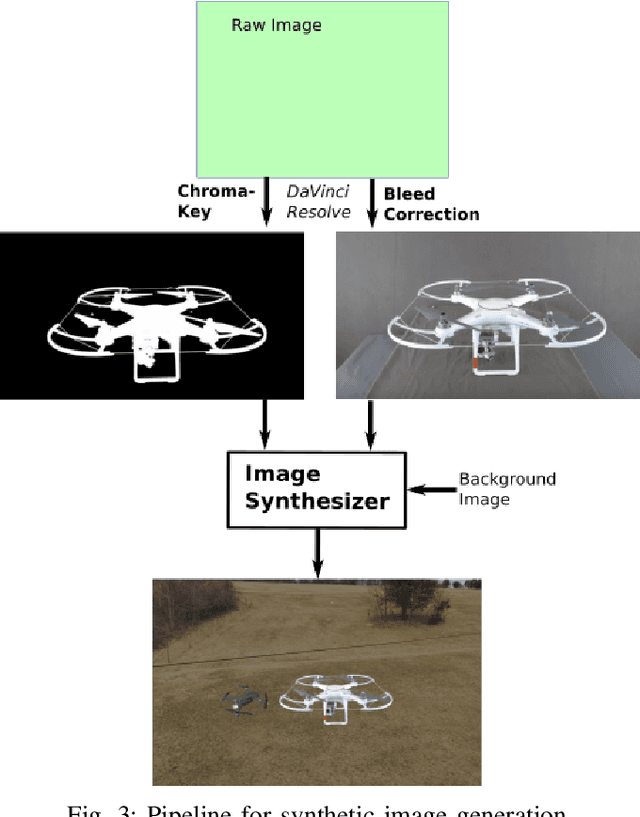
Scalable training data generation is a critical problem in deep learning. We propose PennSyn2Real - a photo-realistic synthetic dataset consisting of more than 100,000 4K images of more than 20 types of micro aerial vehicles (MAVs). The dataset can be used to generate arbitrary numbers of training images for high-level computer vision tasks such as MAV detection and classification. Our data generation framework bootstraps chroma-keying, a mature cinematography technique with a motion tracking system, providing artifact-free and curated annotated images where object orientations and lighting are controlled. This framework is easy to set up and can be applied to a broad range of objects, reducing the gap between synthetic and real-world data. We show that synthetic data generated using this framework can be directly used to train CNN models for common object recognition tasks such as detection and segmentation. We demonstrate competitive performance in comparison with training using only real images. Furthermore, bootstrapping the generated synthetic data in few-shot learning can significantly improve the overall performance, reducing the number of required training data samples to achieve the desired accuracy.
Nuclear Environments Inspection with Micro Aerial Vehicles: Algorithms and Experiments
Mar 14, 2019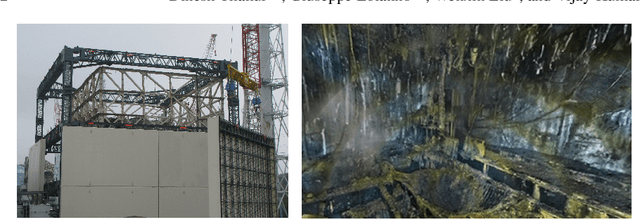
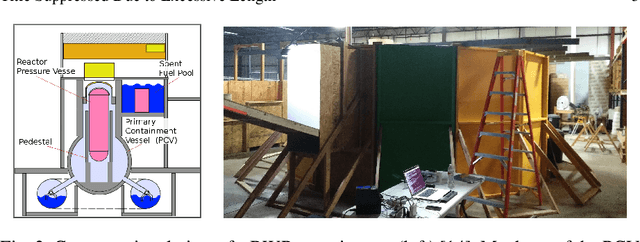
In this work, we address the estimation, planning, control and mapping problems to allow a small quadrotor to autonomously inspect the interior of hazardous damaged nuclear sites. These algorithms run onboard on a computationally limited CPU. We investigate the effect of varying illumination on the system performance. To the best of our knowledge, this is the first fully autonomous system of this size and scale applied to inspect the interior of a full scale mock-up of a Primary Containment Vessel (PCV). The proposed solution opens up new ways to inspect nuclear reactors and to support nuclear decommissioning, which is well known to be a dangerous, long and tedious process. Experimental results with varying illumination conditions show the ability to navigate a full scale mock-up PCV pedestal and create a map of the environment, while concurrently avoiding obstacles.
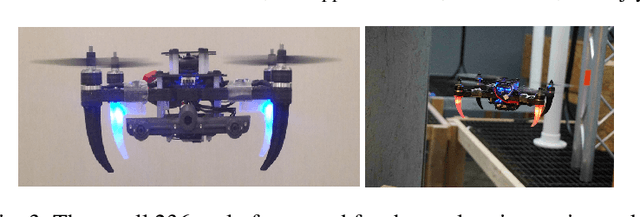
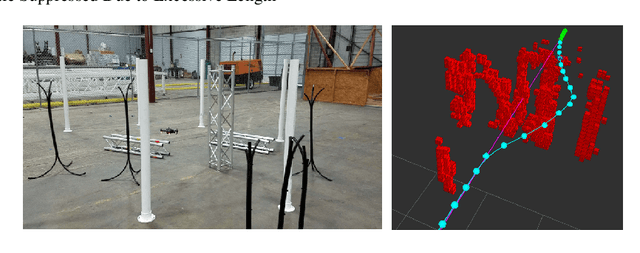
Resilient Active Information Gathering with Mobile Robots
Sep 02, 2018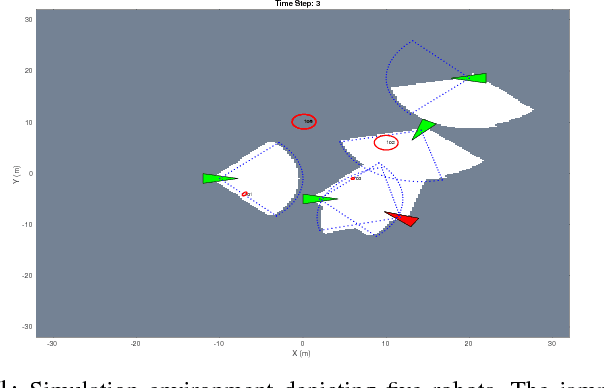
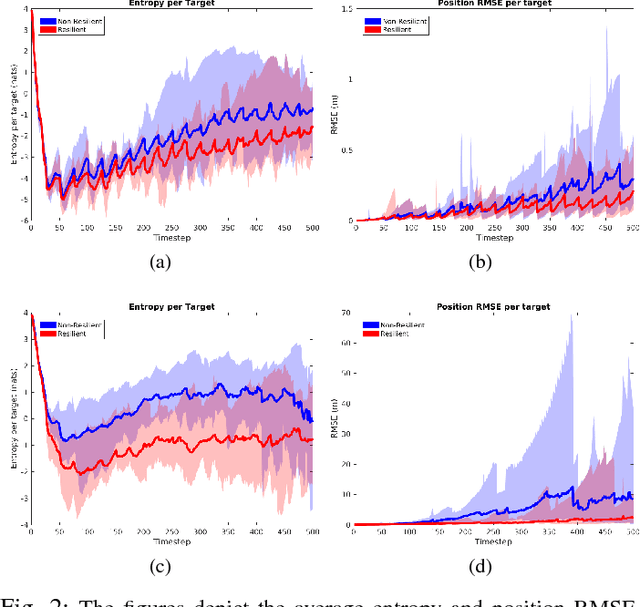
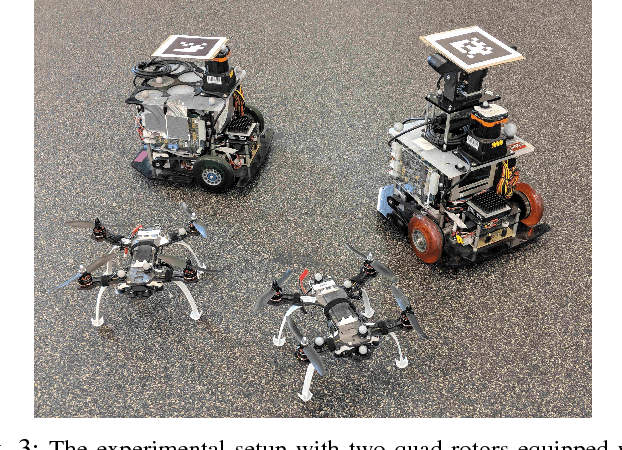
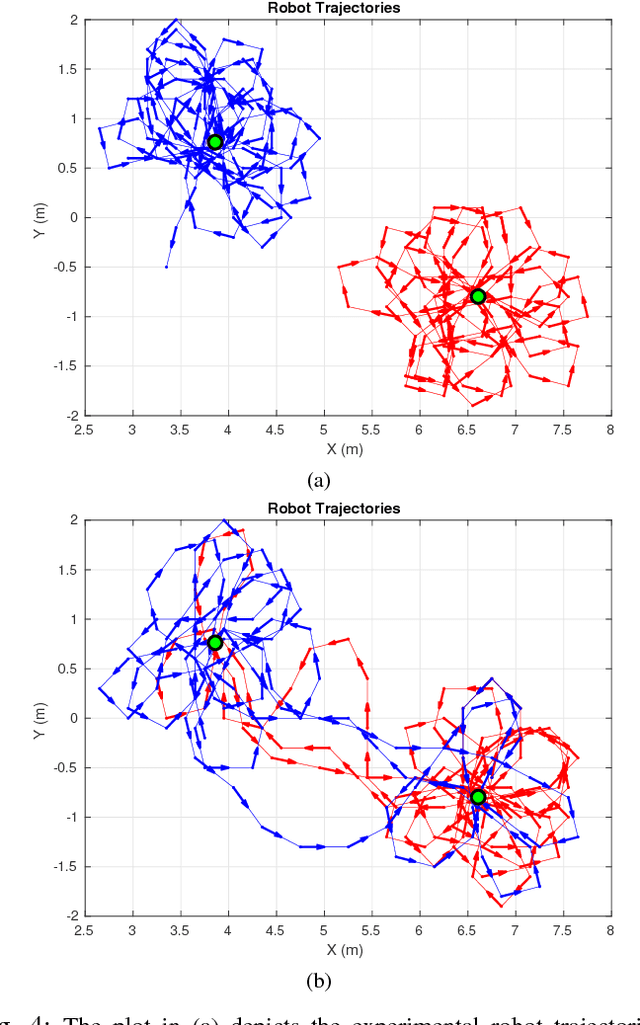
Applications of safety, security, and rescue in robotics, such as multi-robot target tracking, involve the execution of information acquisition tasks by teams of mobile robots. However, in failure-prone or adversarial environments, robots get attacked, their communication channels get jammed, and their sensors may fail, resulting in the withdrawal of robots from the collective task, and consequently the inability of the remaining active robots to coordinate with each other. As a result, traditional design paradigms become insufficient and, in contrast, resilient designs against system-wide failures and attacks become important. In general, resilient design problems are hard, and even though they often involve objective functions that are monotone or submodular, scalable approximation algorithms for their solution have been hitherto unknown. In this paper, we provide the first algorithm, enabling the following capabilities: minimal communication, i.e., the algorithm is executed by the robots based only on minimal communication between them; system-wide resiliency, i.e., the algorithm is valid for any number of denial-of-service attacks and failures; and provable approximation performance, i.e., the algorithm ensures for all monotone (and not necessarily submodular) objective functions a solution that is finitely close to the optimal. We quantify our algorithm's approximation performance using a notion of curvature for monotone set functions. We support our theoretical analyses with simulated and real-world experiments, by considering an active information gathering scenario, namely, multi-robot target tracking.
The Multi Vehicle Stereo Event Camera Dataset: An Event Camera Dataset for 3D Perception
Feb 19, 2018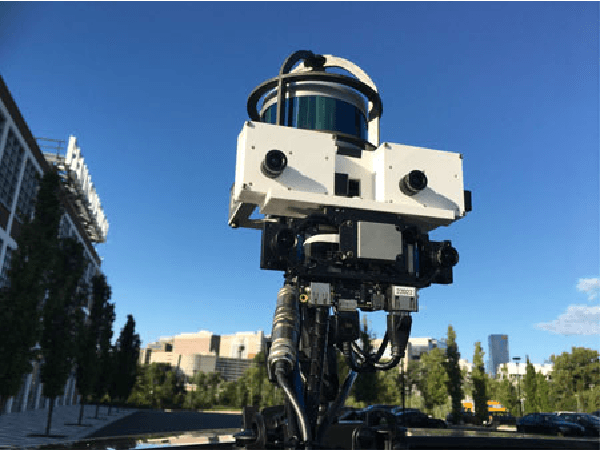
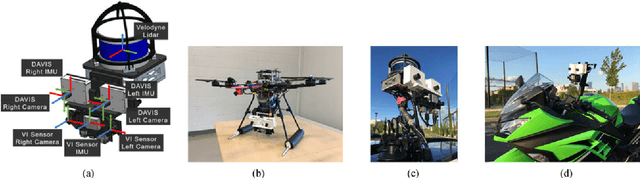
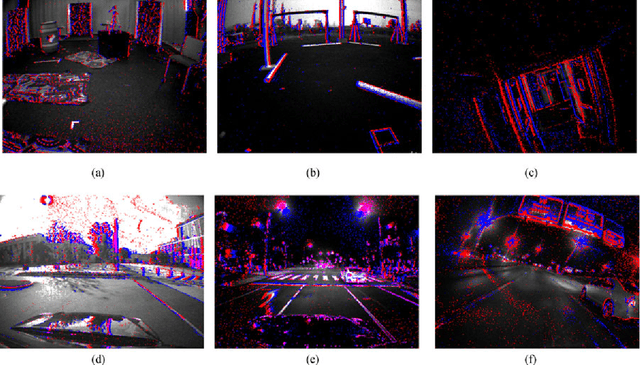
Event based cameras are a new passive sensing modality with a number of benefits over traditional cameras, including extremely low latency, asynchronous data acquisition, high dynamic range and very low power consumption. There has been a lot of recent interest and development in applying algorithms to use the events to perform a variety of 3D perception tasks, such as feature tracking, visual odometry, and stereo depth estimation. However, there currently lacks the wealth of labeled data that exists for traditional cameras to be used for both testing and development. In this paper, we present a large dataset with a synchronized stereo pair event based camera system, carried on a handheld rig, flown by a hexacopter, driven on top of a car and mounted on a motorcycle, in a variety of different illumination levels and environments. From each camera, we provide the event stream, grayscale images and IMU readings. In addition, we utilize a combination of IMU, a rigidly mounted lidar system, indoor and outdoor motion capture and GPS to provide accurate pose and depth images for each camera at up to 100Hz. For comparison, we also provide synchronized grayscale images and IMU readings from a frame based stereo camera system.