 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRemote Sensing Image Super-Resolution for Imbalanced Textures: A Texture-Aware Diffusion Framework
Apr 15, 2026Generative diffusion priors have recently achieved state-of-the-art performance in natural image super-resolution, demonstrating a powerful capability to synthesize photorealistic details. However, their direct application to remote sensing image super-resolution (RSISR) reveals significant shortcomings. Unlike natural images, remote sensing images exhibit a unique texture distribution where ground objects are globally stochastic yet locally clustered, leading to highly imbalanced textures. This imbalance severely hinders the model's spatial perception. To address this, we propose TexADiff, a novel framework that begins by estimating a Relative Texture Density Map (RTDM) to represent the texture distribution. TexADiff then leverages this RTDM in three synergistic ways: as an explicit spatial conditioning to guide the diffusion process, as a loss modulation term to prioritize texture-rich regions, and as a dynamic adapter for the sampling schedule. These modifications are designed to endow the model with explicit texture-aware capabilities. Experiments demonstrate that TexADiff achieves superior or competitive quantitative metrics. Furthermore, qualitative results show that our model generates faithful high-frequency details while effectively suppressing texture hallucinations. This improved reconstruction quality also results in significant gains in downstream task performance. The source code of our method can be found at https://github.com/ZezFuture/TexAdiff.
Complementary Reinforcement Learning
Mar 18, 2026Reinforcement Learning (RL) has emerged as a powerful paradigm for training LLM-based agents, yet remains limited by low sample efficiency, stemming not only from sparse outcome feedback but also from the agent's inability to leverage prior experience across episodes. While augmenting agents with historical experience offers a promising remedy, existing approaches suffer from a critical weakness: the experience distilled from history is either stored statically or fail to coevolve with the improving actor, causing a progressive misalignment between the experience and the actor's evolving capability that diminishes its utility over the course of training. Inspired by complementary learning systems in neuroscience, we present Complementary RL to achieve seamless co-evolution of an experience extractor and a policy actor within the RL optimization loop. Specifically, the actor is optimized via sparse outcome-based rewards, while the experience extractor is optimized according to whether its distilled experiences demonstrably contribute to the actor's success, thereby evolving its experience management strategy in lockstep with the actor's growing capabilities. Empirically, Complementary RL outperforms outcome-based agentic RL baselines that do not learn from experience, achieving 10% performance improvement in single-task scenarios and exhibits robust scalability in multi-task settings. These results establish Complementary RL as a paradigm for efficient experience-driven agent learning.
When Does Sparsity Mitigate the Curse of Depth in LLMs
Mar 16, 2026Recent work has demonstrated the curse of depth in large language models (LLMs), where later layers contribute less to learning and representation than earlier layers. Such under-utilization is linked to the accumulated growth of variance in Pre-Layer Normalization, which can push deep blocks toward near-identity behavior. In this paper, we demonstrate that, sparsity, beyond enabling efficiency, acts as a regulator of variance propagation and thereby improves depth utilization. Our investigation covers two sources of sparsity: (i) implicit sparsity, which emerges from training and data conditions, including weight sparsity induced by weight decay and attention sparsity induced by long context inputs; and (ii) explicit sparsity, which is enforced by architectural design, including key/value-sharing sparsity in Grouped-Query Attention and expert-activation sparsity in Mixtureof-Experts. Our claim is thoroughly supported by controlled depth-scaling experiments and targeted layer effectiveness interventions. Across settings, we observe a consistent relationship: sparsity improves layer utilization by reducing output variance and promoting functional differentiation. We eventually distill our findings into a practical rule-of-thumb recipe for training deptheffective LLMs, yielding a notable 4.6% accuracy improvement on downstream tasks. Our results reveal sparsity, arising naturally from standard design choices, as a key yet previously overlooked mechanism for effective depth scaling in LLMs. Code is available at https://github.com/pUmpKin-Co/SparsityAndCoD.
Why Diffusion Language Models Struggle with Truly Parallel (Non-Autoregressive) Decoding?
Feb 26, 2026Diffusion Language Models (DLMs) are often advertised as enabling parallel token generation, yet practical fast DLMs frequently converge to left-to-right, autoregressive (AR)-like decoding dynamics. In contrast, genuinely non-AR generation is promising because it removes AR's sequential bottleneck, better exploiting parallel hardware to reduce synchronization/communication overhead and improve latency scaling with output length. We argue that a primary driver of AR-like decoding is a mismatch between DLM objectives and the highly sequential structure of widely used training data, including standard pretraining corpora and long chain-of-thought (CoT) supervision. Motivated by this diagnosis, we propose NAP (Non-Autoregressive Parallel DLMs), a proof-of-concept, data-centric approach that better aligns supervision with non-AR parallel decoding. NAP curates examples as multiple independent reasoning trajectories and couples them with a parallel-forced decoding strategy that encourages multi-token parallel updates. Across math reasoning benchmarks, NAP yields stronger performance under parallel decoding than DLMs trained on standard long CoT data, with gains growing as parallelism increases. Our results suggest that revisiting data and supervision is a principled direction for mitigating AR-like behavior and moving toward genuinely non-autoregressive parallel generation in DLMs. Our code is available at https://github.com/pixeli99/NAP.
Let It Flow: Agentic Crafting on Rock and Roll, Building the ROME Model within an Open Agentic Learning Ecosystem
Dec 31, 2025Agentic crafting requires LLMs to operate in real-world environments over multiple turns by taking actions, observing outcomes, and iteratively refining artifacts. Despite its importance, the open-source community lacks a principled, end-to-end ecosystem to streamline agent development. We introduce the Agentic Learning Ecosystem (ALE), a foundational infrastructure that optimizes the production pipeline for agent LLMs. ALE consists of three components: ROLL, a post-training framework for weight optimization; ROCK, a sandbox environment manager for trajectory generation; and iFlow CLI, an agent framework for efficient context engineering. We release ROME (ROME is Obviously an Agentic Model), an open-source agent grounded by ALE and trained on over one million trajectories. Our approach includes data composition protocols for synthesizing complex behaviors and a novel policy optimization algorithm, Interaction-based Policy Alignment (IPA), which assigns credit over semantic interaction chunks rather than individual tokens to improve long-horizon training stability. Empirically, we evaluate ROME within a structured setting and introduce Terminal Bench Pro, a benchmark with improved scale and contamination control. ROME demonstrates strong performance across benchmarks like SWE-bench Verified and Terminal Bench, proving the effectiveness of the ALE infrastructure.
RollArt: Scaling Agentic RL Training via Disaggregated Infrastructure
Dec 27, 2025Agentic Reinforcement Learning (RL) enables Large Language Models (LLMs) to perform autonomous decision-making and long-term planning. Unlike standard LLM post-training, agentic RL workloads are highly heterogeneous, combining compute-intensive prefill phases, bandwidth-bound decoding, and stateful, CPU-heavy environment simulations. We argue that efficient agentic RL training requires disaggregated infrastructure to leverage specialized, best-fit hardware. However, naive disaggregation introduces substantial synchronization overhead and resource underutilization due to the complex dependencies between stages. We present RollArc, a distributed system designed to maximize throughput for multi-task agentic RL on disaggregated infrastructure. RollArc is built on three core principles: (1) hardware-affinity workload mapping, which routes compute-bound and bandwidth-bound tasks to bestfit GPU devices, (2) fine-grained asynchrony, which manages execution at the trajectory level to mitigate resource bubbles, and (3) statefulness-aware computation, which offloads stateless components (e.g., reward models) to serverless infrastructure for elastic scaling. Our results demonstrate that RollArc effectively improves training throughput and achieves 1.35-2.05\(\times\) end-to-end training time reduction compared to monolithic and synchronous baselines. We also evaluate RollArc by training a hundreds-of-billions-parameter MoE model for Qoder product on an Alibaba cluster with more than 3,000 GPUs, further demonstrating RollArc scalability and robustness. The code is available at https://github.com/alibaba/ROLL.
FarSLIP: Discovering Effective CLIP Adaptation for Fine-Grained Remote Sensing Understanding
Nov 18, 2025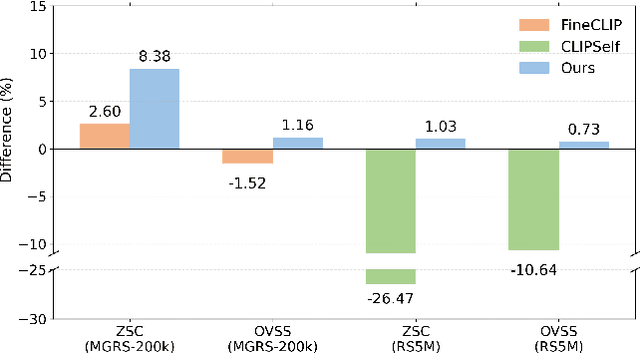
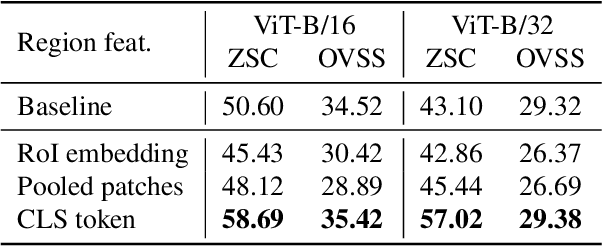
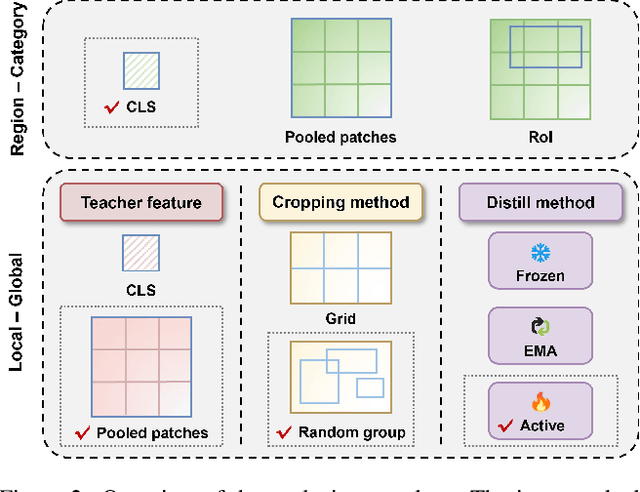
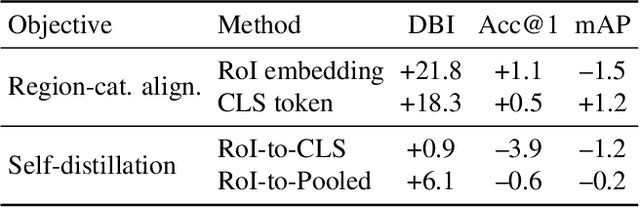
As CLIP's global alignment limits its ability to capture fine-grained details, recent efforts have focused on enhancing its region-text alignment. However, current remote sensing (RS)-specific CLIP variants still inherit this limited spatial awareness. We identify two key limitations behind this: (1) current RS image-text datasets generate global captions from object-level labels, leaving the original object-level supervision underutilized; (2) despite the success of region-text alignment methods in general domain, their direct application to RS data often leads to performance degradation. To address these, we construct the first multi-granularity RS image-text dataset, MGRS-200k, featuring rich object-level textual supervision for RS region-category alignment. We further investigate existing fine-grained CLIP tuning strategies and find that current explicit region-text alignment methods, whether in a direct or indirect way, underperform due to severe degradation of CLIP's semantic coherence. Building on these, we propose FarSLIP, a Fine-grained Aligned RS Language-Image Pretraining framework. Rather than the commonly used patch-to-CLS self-distillation, FarSLIP employs patch-to-patch distillation to align local and global visual cues, which improves feature discriminability while preserving semantic coherence. Additionally, to effectively utilize region-text supervision, it employs simple CLS token-based region-category alignment rather than explicit patch-level alignment, further enhancing spatial awareness. FarSLIP features improved fine-grained vision-language alignment in RS domain and sets a new state of the art not only on RS open-vocabulary semantic segmentation, but also on image-level tasks such as zero-shot classification and image-text retrieval. Our dataset, code, and models are available at https://github.com/NJU-LHRS/FarSLIP.
Diffusion Language Models Know the Answer Before Decoding
Aug 27, 2025



Diffusion language models (DLMs) have recently emerged as an alternative to autoregressive approaches, offering parallel sequence generation and flexible token orders. However, their inference remains slower than that of autoregressive models, primarily due to the cost of bidirectional attention and the large number of refinement steps required for high quality outputs. In this work, we highlight and leverage an overlooked property of DLMs early answer convergence: in many cases, the correct answer can be internally identified by half steps before the final decoding step, both under semi-autoregressive and random remasking schedules. For example, on GSM8K and MMLU, up to 97% and 99% of instances, respectively, can be decoded correctly using only half of the refinement steps. Building on this observation, we introduce Prophet, a training-free fast decoding paradigm that enables early commit decoding. Specifically, Prophet dynamically decides whether to continue refinement or to go "all-in" (i.e., decode all remaining tokens in one step), using the confidence gap between the top-2 prediction candidates as the criterion. It integrates seamlessly into existing DLM implementations, incurs negligible overhead, and requires no additional training. Empirical evaluations of LLaDA-8B and Dream-7B across multiple tasks show that Prophet reduces the number of decoding steps by up to 3.4x while preserving high generation quality. These results recast DLM decoding as a problem of when to stop sampling, and demonstrate that early decode convergence provides a simple yet powerful mechanism for accelerating DLM inference, complementary to existing speedup techniques. Our code is publicly available at https://github.com/pixeli99/Prophet.
StreamAdapter: Efficient Test Time Adaptation from Contextual Streams
Nov 14, 2024



In-context learning (ICL) allows large language models (LLMs) to adapt to new tasks directly from the given demonstrations without requiring gradient updates. While recent advances have expanded context windows to accommodate more demonstrations, this approach increases inference costs without necessarily improving performance. To mitigate these issues, We propose StreamAdapter, a novel approach that directly updates model parameters from context at test time, eliminating the need for explicit in-context demonstrations. StreamAdapter employs context mapping and weight absorption mechanisms to dynamically transform ICL demonstrations into parameter updates with minimal additional parameters. By reducing reliance on numerous in-context examples, StreamAdapter significantly reduce inference costs and allows for efficient inference with constant time complexity, regardless of demonstration count. Extensive experiments across diverse tasks and model architectures demonstrate that StreamAdapter achieves comparable or superior adaptation capability to ICL while requiring significantly fewer demonstrations. The superior task adaptation and context encoding capabilities of StreamAdapter on both language understanding and generation tasks provides a new perspective for adapting LLMs at test time using context, allowing for more efficient adaptation across scenarios and more cost-effective inference
LHRS-Bot-Nova: Improved Multimodal Large Language Model for Remote Sensing Vision-Language Interpretation
Nov 14, 2024



Automatically and rapidly understanding Earth's surface is fundamental to our grasp of the living environment and informed decision-making. This underscores the need for a unified system with comprehensive capabilities in analyzing Earth's surface to address a wide range of human needs. The emergence of multimodal large language models (MLLMs) has great potential in boosting the efficiency and convenience of intelligent Earth observation. These models can engage in human-like conversations, serve as unified platforms for understanding images, follow diverse instructions, and provide insightful feedbacks. In this study, we introduce LHRS-Bot-Nova, an MLLM specialized in understanding remote sensing (RS) images, designed to expertly perform a wide range of RS understanding tasks aligned with human instructions. LHRS-Bot-Nova features an enhanced vision encoder and a novel bridge layer, enabling efficient visual compression and better language-vision alignment. To further enhance RS-oriented vision-language alignment, we propose a large-scale RS image-caption dataset, generated through feature-guided image recaptioning. Additionally, we introduce an instruction dataset specifically designed to improve spatial recognition abilities. Extensive experiments demonstrate superior performance of LHRS-Bot-Nova across various RS image understanding tasks. We also evaluate different MLLM performances in complex RS perception and instruction following using a complicated multi-choice question evaluation benchmark, providing a reliable guide for future model selection and improvement. Data, code, and models will be available at https://github.com/NJU-LHRS/LHRS-Bot.