 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Image": models, code, and papers
PLADE-Net: Towards Pixel-Level Accuracy for Self-Supervised Single-View Depth Estimation with Neural Positional Encoding and Distilled Matting Loss
Mar 12, 2021
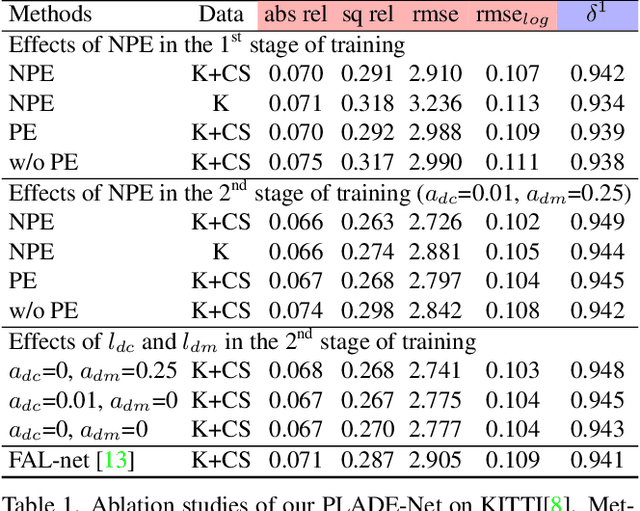
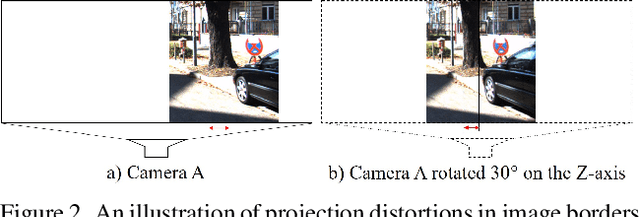
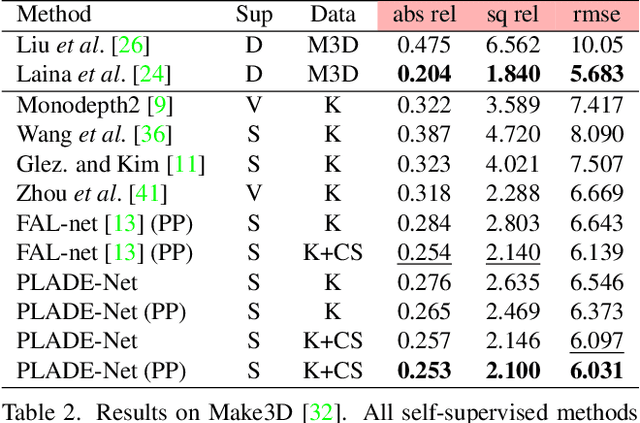
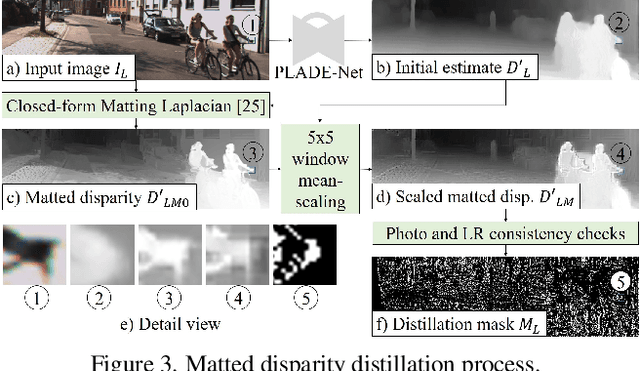
In this paper, we propose a self-supervised single-view pixel-level accurate depth estimation network, called PLADE-Net. The PLADE-Net is the first work that shows unprecedented accuracy levels, exceeding 95\% in terms of the $\delta^1$ metric on the challenging KITTI dataset. Our PLADE-Net is based on a new network architecture with neural positional encoding and a novel loss function that borrows from the closed-form solution of the matting Laplacian to learn pixel-level accurate depth estimation from stereo images. Neural positional encoding allows our PLADE-Net to obtain more consistent depth estimates by letting the network reason about location-specific image properties such as lens and projection distortions. Our novel distilled matting Laplacian loss allows our network to predict sharp depths at object boundaries and more consistent depths in highly homogeneous regions. Our proposed method outperforms all previous self-supervised single-view depth estimation methods by a large margin on the challenging KITTI dataset, with unprecedented levels of accuracy. Furthermore, our PLADE-Net, naively extended for stereo inputs, outperforms the most recent self-supervised stereo methods, even without any advanced blocks like 1D correlations, 3D convolutions, or spatial pyramid pooling. We present extensive ablation studies and experiments that support our method's effectiveness on the KITTI, CityScapes, and Make3D datasets.
Searching for Alignment in Face Recognition
Feb 10, 2021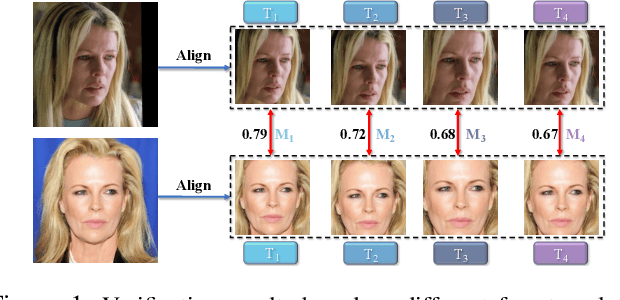
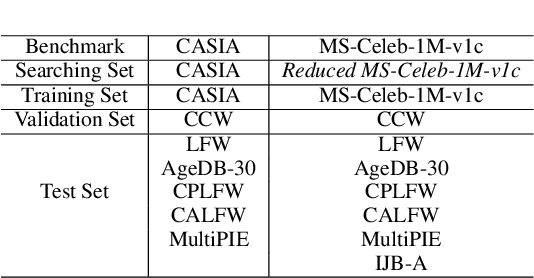
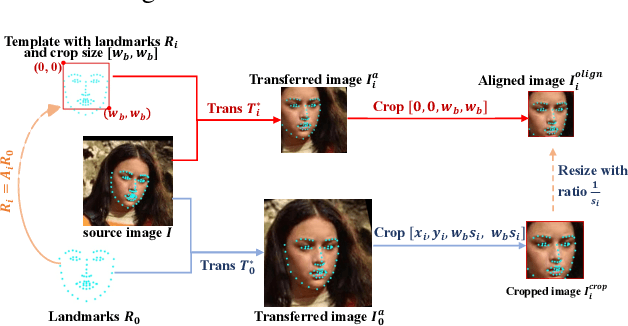
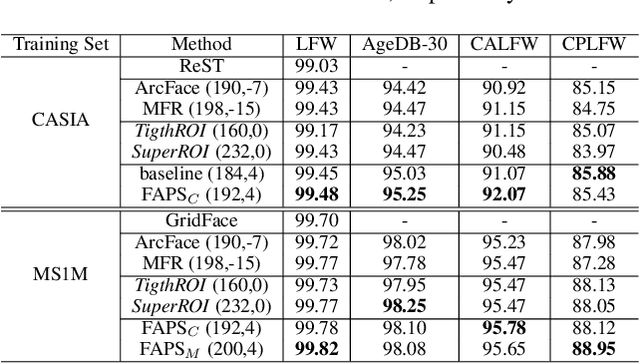
A standard pipeline of current face recognition frameworks consists of four individual steps: locating a face with a rough bounding box and several fiducial landmarks, aligning the face image using a pre-defined template, extracting representations and comparing. Among them, face detection, landmark detection and representation learning have long been studied and a lot of works have been proposed. As an essential step with a significant impact on recognition performance, the alignment step has attracted little attention. In this paper, we first explore and highlight the effects of different alignment templates on face recognition. Then, for the first time, we try to search for the optimal template automatically. We construct a well-defined searching space by decomposing the template searching into the crop size and vertical shift, and propose an efficient method Face Alignment Policy Search (FAPS). Besides, a well-designed benchmark is proposed to evaluate the searched policy. Experiments on our proposed benchmark validate the effectiveness of our method to improve face recognition performance.
Dynamic Neural Networks: A Survey
Feb 10, 2021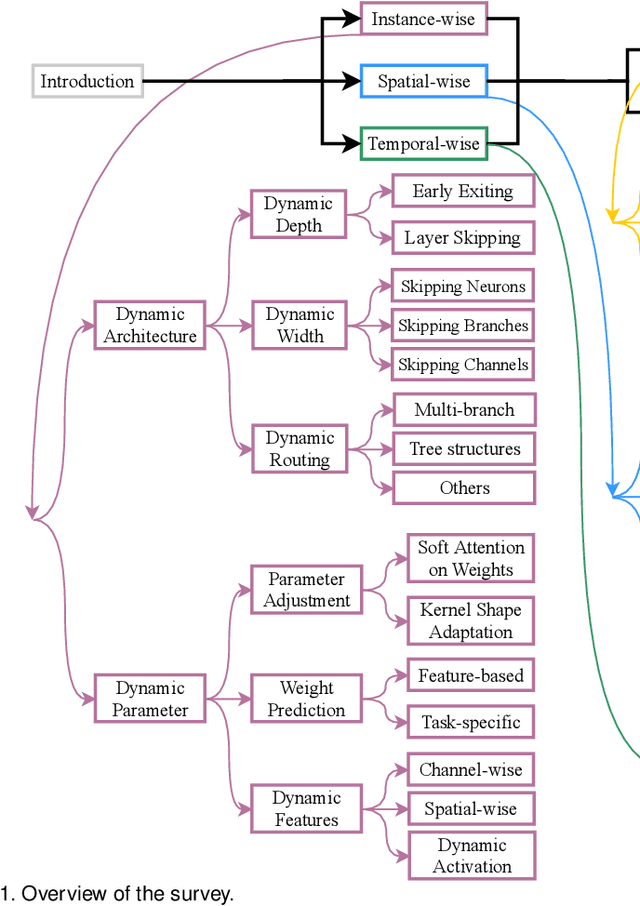
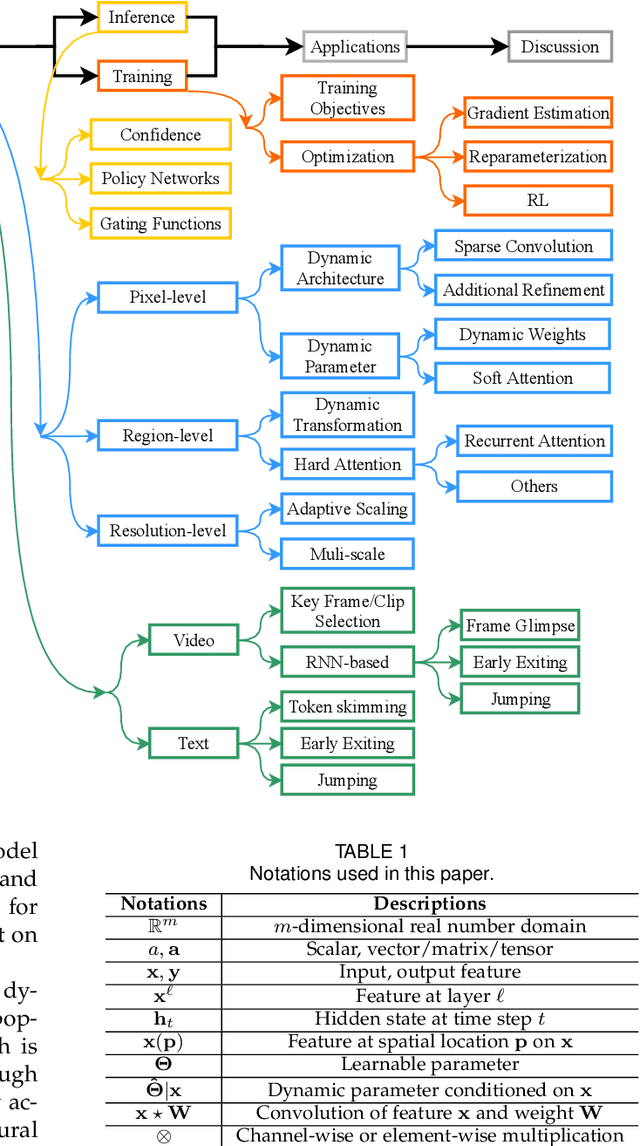
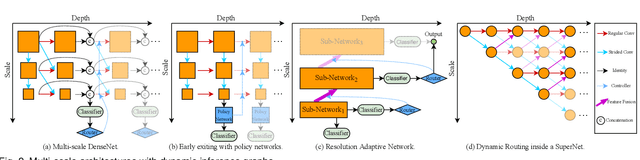

Dynamic neural network is an emerging research topic in deep learning. Compared to static models which have fixed computational graphs and parameters at the inference stage, dynamic networks can adapt their structures or parameters to different inputs, leading to notable advantages in terms of accuracy, computational efficiency, adaptiveness, etc. In this survey, we comprehensively review this rapidly developing area by dividing dynamic networks into three main categories: 1) instance-wise dynamic models that process each instance with data-dependent architectures or parameters; 2) spatial-wise dynamic networks that conduct adaptive computation with respect to different spatial locations of image data and 3) temporal-wise dynamic models that perform adaptive inference along the temporal dimension for sequential data such as videos and texts. The important research problems of dynamic networks, e.g., architecture design, decision making scheme, optimization technique and applications, are reviewed systematically. Finally, we discuss the open problems in this field together with interesting future research directions.
CariMe: Unpaired Caricature Generation with Multiple Exaggerations
Oct 01, 2020



Caricature generation aims to translate real photos into caricatures with artistic styles and shape exaggerations while maintaining the identity of the subject. Different from the generic image-to-image translation, drawing a caricature automatically is a more challenging task due to the existence of various spacial deformations. Previous caricature generation methods are obsessed with predicting definite image warping from a given photo while ignoring the intrinsic representation and distribution for exaggerations in caricatures. This limits their ability on diverse exaggeration generation. In this paper, we generalize the caricature generation problem from instance-level warping prediction to distribution-level deformation modeling. Based on this assumption, we present the first exploration for unpaired CARIcature generation with Multiple Exaggerations (CariMe). Technically, we propose a Multi-exaggeration Warper network to learn the distribution-level mapping from photo to facial exaggerations. This makes it possible to generate diverse and reasonable exaggerations from randomly sampled warp codes given one input photo. To better represent the facial exaggeration and produce fine-grained warping, a deformation-field-based warping method is also proposed, which helps us to capture more detailed exaggerations than other point-based warping methods. Experiments and two perceptual studies prove the superiority of our method comparing with other state-of-the-art methods, showing the improvement of our work on caricature generation.
Face Morphing Attack Generation & Detection: A Comprehensive Survey
Nov 03, 2020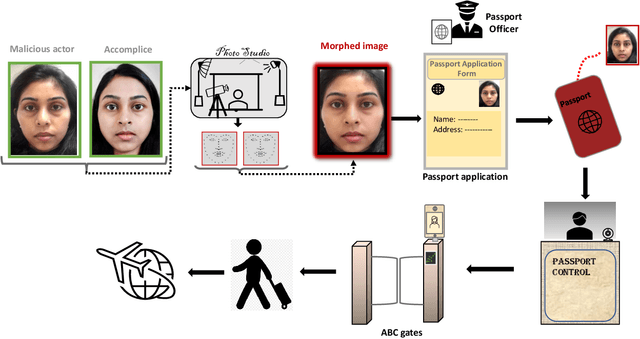
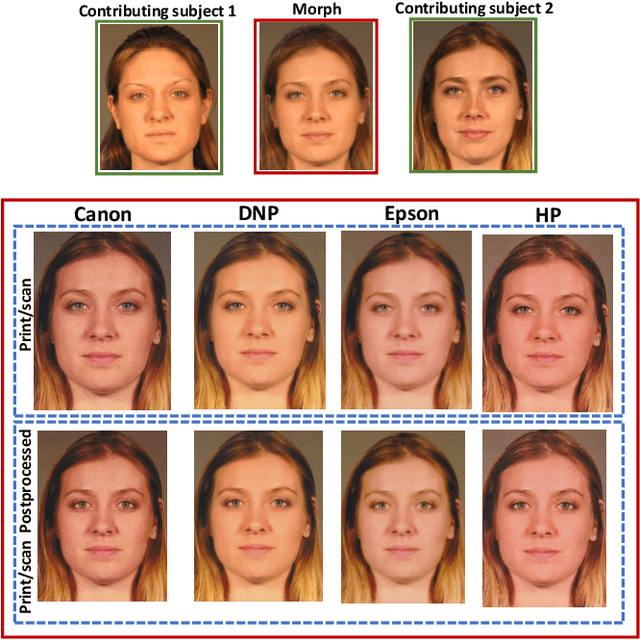
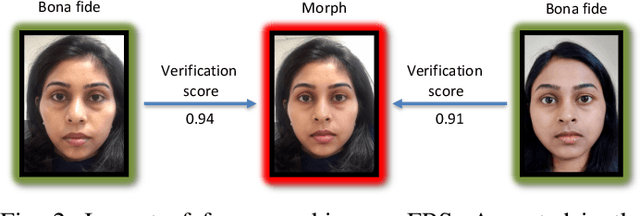
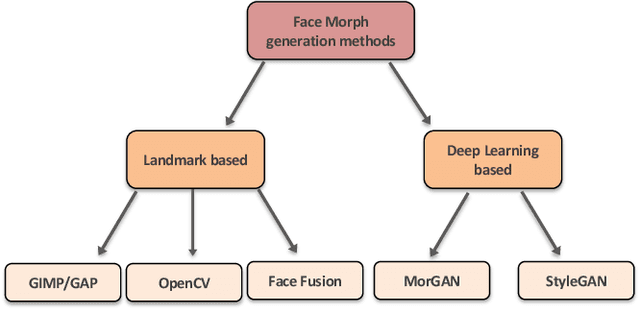
The vulnerability of Face Recognition System (FRS) to various kind of attacks (both direct and in-direct attacks) and face morphing attacks has received a great interest from the biometric community. The goal of a morphing attack is to subvert the FRS at Automatic Border Control (ABC) gates by presenting the Electronic Machine Readable Travel Document (eMRTD) or e-passport that is obtained based on the morphed face image. Since the application process for the e-passport in the majority countries requires a passport photo to be presented by the applicant, a malicious actor and the accomplice can generate the morphed face image and to obtain the e-passport. An e-passport with a morphed face images can be used by both the malicious actor and the accomplice to cross the border as the morphed face image can be verified against both of them. This can result in a significant threat as a malicious actor can cross the border without revealing the track of his/her criminal background while the details of accomplice are recorded in the log of the access control system. This survey aims to present a systematic overview of the progress made in the area of face morphing in terms of both morph generation and morph detection. In this paper, we describe and illustrate various aspects of face morphing attacks, including different techniques for generating morphed face images but also the state-of-the-art regarding Morph Attack Detection (MAD) algorithms based on a stringent taxonomy and finally the availability of public databases, which allow to benchmark new MAD algorithms in a reproducible manner. The outcomes of competitions/benchmarking, vulnerability assessments and performance evaluation metrics are also provided in a comprehensive manner. Furthermore, we discuss the open challenges and potential future works that need to be addressed in this evolving field of biometrics.
3D Human Mesh Regression with Dense Correspondence
Jun 10, 2020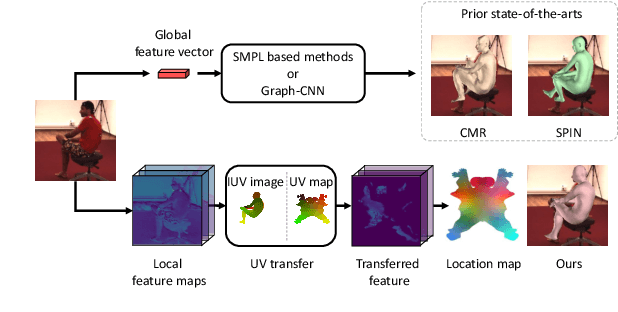
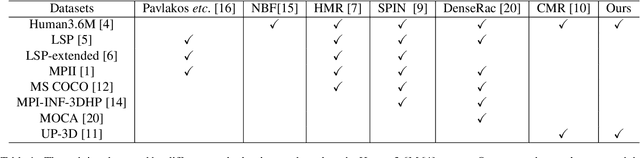
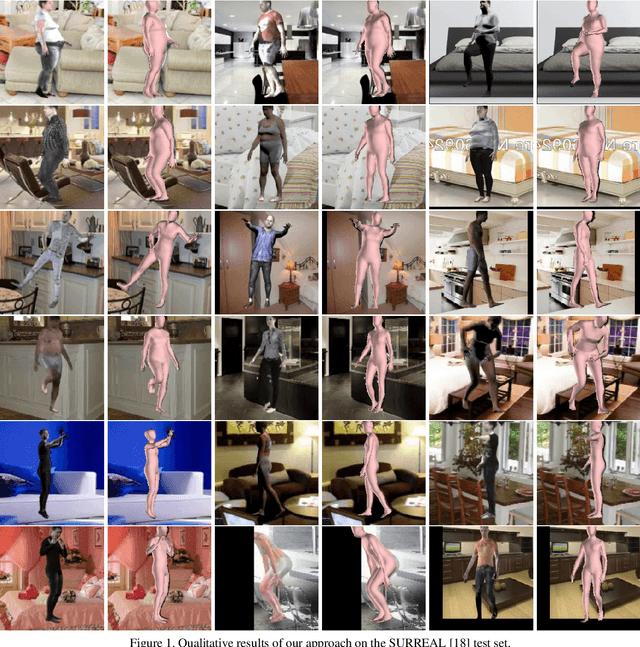
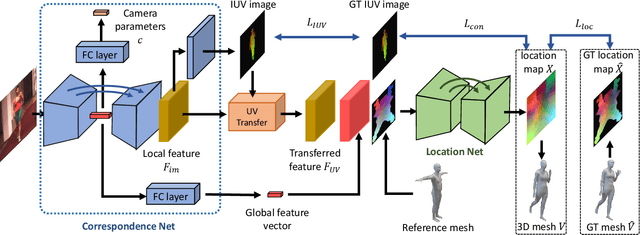
Estimating 3D mesh of the human body from a single 2D image is an important task with many applications such as augmented reality and Human-Robot interaction. However, prior works reconstructed 3D mesh from global image feature extracted by using convolutional neural network (CNN), where the dense correspondences between the mesh surface and the image pixels are missing, leading to suboptimal solution. This paper proposes a model-free 3D human mesh estimation framework, named DecoMR, which explicitly establishes the dense correspondence between the mesh and the local image features in the UV space (i.e. a 2D space used for texture mapping of 3D mesh). DecoMR first predicts pixel-to-surface dense correspondence map (i.e., IUV image), with which we transfer local features from the image space to the UV space. Then the transferred local image features are processed in the UV space to regress a location map, which is well aligned with transferred features. Finally we reconstruct 3D human mesh from the regressed location map with a predefined mapping function. We also observe that the existing discontinuous UV map are unfriendly to the learning of network. Therefore, we propose a novel UV map that maintains most of the neighboring relations on the original mesh surface. Experiments demonstrate that our proposed local feature alignment and continuous UV map outperforms existing 3D mesh based methods on multiple public benchmarks. Code will be made available at https://github.com/zengwang430521/DecoMR
Picture-to-Amount (PITA): Predicting Relative Ingredient Amounts from Food Images
Oct 17, 2020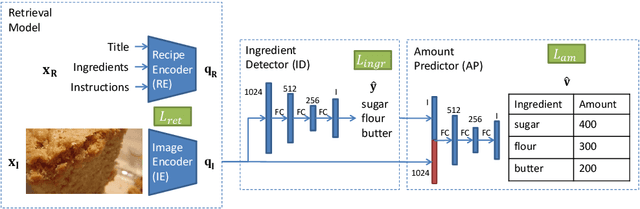
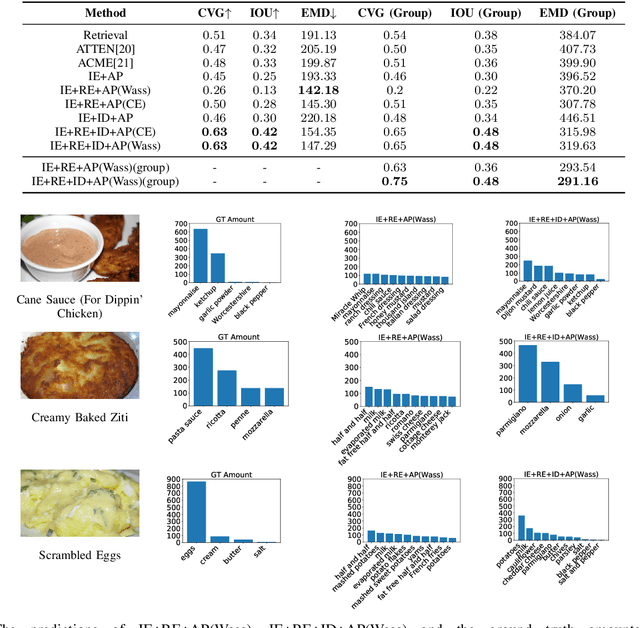

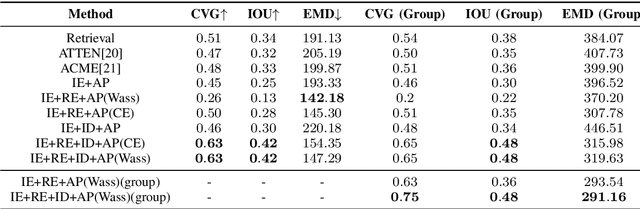
Increased awareness of the impact of food consumption on health and lifestyle today has given rise to novel data-driven food analysis systems. Although these systems may recognize the ingredients, a detailed analysis of their amounts in the meal, which is paramount for estimating the correct nutrition, is usually ignored. In this paper, we study the novel and challenging problem of predicting the relative amount of each ingredient from a food image. We propose PITA, the Picture-to-Amount deep learning architecture to solve the problem. More specifically, we predict the ingredient amounts using a domain-driven Wasserstein loss from image-to-recipe cross-modal embeddings learned to align the two views of food data. Experiments on a dataset of recipes collected from the Internet show the model generates promising results and improves the baselines on this challenging task. A demo of our system and our data is availableat: foodai.cs.rutgers.edu.
PlaneRCNN: 3D Plane Detection and Reconstruction from a Single Image
Jan 08, 2019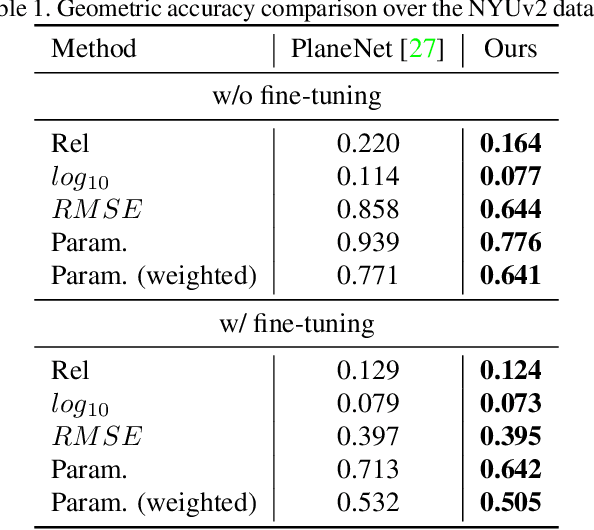
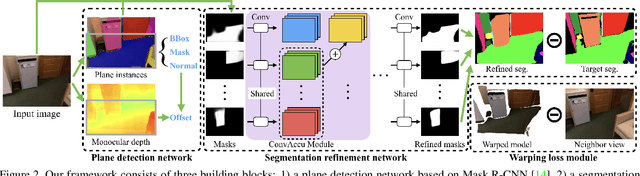
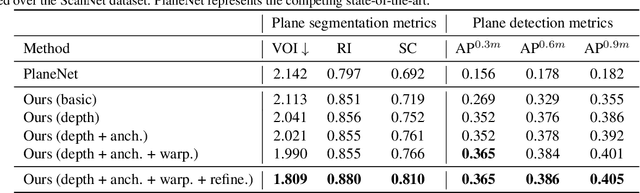
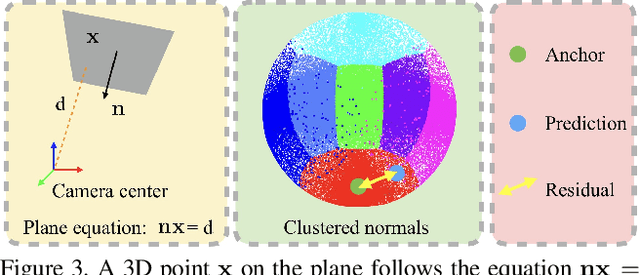
This paper proposes a deep neural architecture, PlaneRCNN, that detects and reconstructs piecewise planar surfaces from a single RGB image. PlaneRCNN employs a variant of Mask R-CNN to detect planes with their plane parameters and segmentation masks. PlaneRCNN then jointly refines all the segmentation masks with a novel loss enforcing the consistency with a nearby view during training. The paper also presents a new benchmark with more fine-grained plane segmentations in the ground-truth, in which, PlaneRCNN outperforms existing state-of-the-art methods with significant margins in the plane detection, segmentation, and reconstruction metrics. PlaneRCNN makes an important step towards robust plane extraction, which would have an immediate impact on a wide range of applications including Robotics, Augmented Reality, and Virtual Reality.
LiDAR-based Recurrent 3D Semantic Segmentation with Temporal Memory Alignment
Mar 03, 2021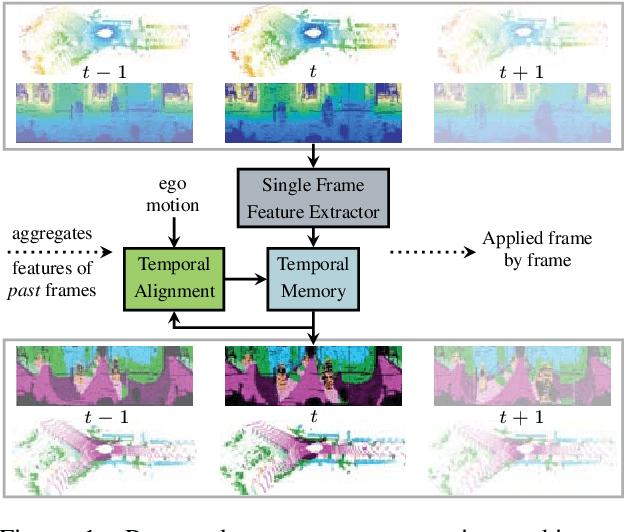
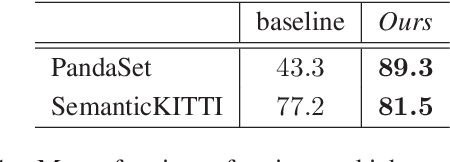
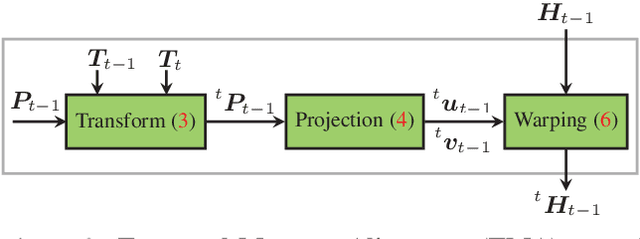
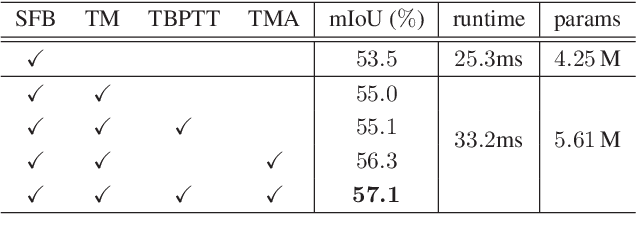
Understanding and interpreting a 3d environment is a key challenge for autonomous vehicles. Semantic segmentation of 3d point clouds combines 3d information with semantics and thereby provides a valuable contribution to this task. In many real-world applications, point clouds are generated by lidar sensors in a consecutive fashion. Working with a time series instead of single and independent frames enables the exploitation of temporal information. We therefore propose a recurrent segmentation architecture (RNN), which takes a single range image frame as input and exploits recursively aggregated temporal information. An alignment strategy, which we call Temporal Memory Alignment, uses ego motion to temporally align the memory between consecutive frames in feature space. A Residual Network and ConvGRU are investigated for the memory update. We demonstrate the benefits of the presented approach on two large-scale datasets and compare it to several stateof-the-art methods. Our approach ranks first on the SemanticKITTI multiple scan benchmark and achieves state-of-the-art performance on the single scan benchmark. In addition, the evaluation shows that the exploitation of temporal information significantly improves segmentation results compared to a single frame approach.
Contrastive Self-supervised Neural Architecture Search
Feb 21, 2021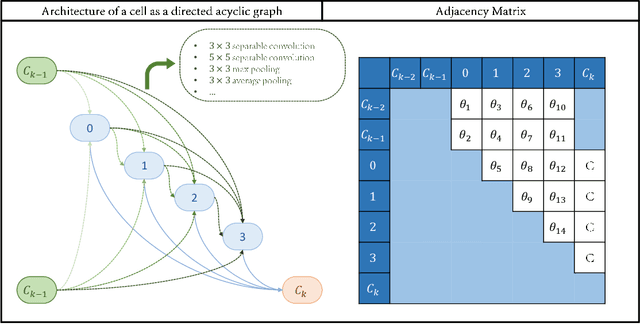
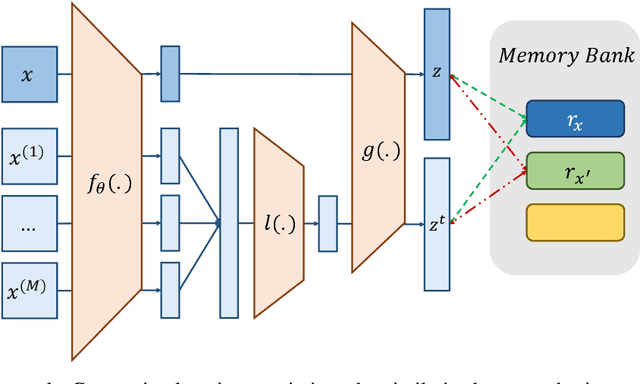
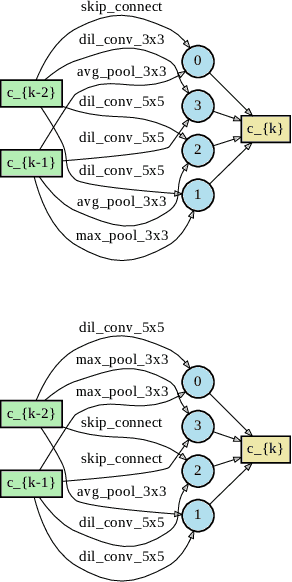
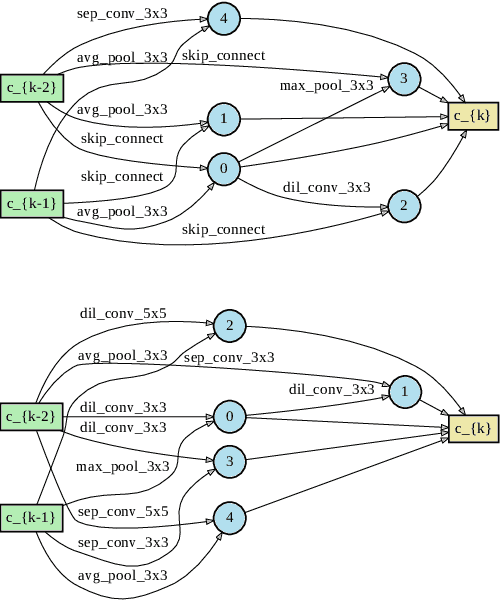
This paper proposes a novel cell-based neural architecture search algorithm (NAS), which completely alleviates the expensive costs of data labeling inherited from supervised learning. Our algorithm capitalizes on the effectiveness of self-supervised learning for image representations, which is an increasingly crucial topic of computer vision. First, using only a small amount of unlabeled train data under contrastive self-supervised learning allow us to search on a more extensive search space, discovering better neural architectures without surging the computational resources. Second, we entirely relieve the cost for labeled data (by contrastive loss) in the search stage without compromising architectures' final performance in the evaluation phase. Finally, we tackle the inherent discrete search space of the NAS problem by sequential model-based optimization via the tree-parzen estimator (SMBO-TPE), enabling us to reduce the computational expense response surface significantly. An extensive number of experiments empirically show that our search algorithm can achieve state-of-the-art results with better efficiency in data labeling cost, searching time, and accuracy in final validation.