 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOmni-RRM: Advancing Omni Reward Modeling via Automatic Rubric-Grounded Preference Synthesis
Jan 31, 2026Multimodal large language models (MLLMs) have shown remarkable capabilities, yet their performance is often capped by the coarse nature of existing alignment techniques. A critical bottleneck remains the lack of effective reward models (RMs): existing RMs are predominantly vision-centric, return opaque scalar scores, and rely on costly human annotations. We introduce \textbf{Omni-RRM}, the first open-source rubric-grounded reward model that produces structured, multi-dimension preference judgments with dimension-wise justifications across \textbf{text, image, video, and audio}. At the core of our approach is \textbf{Omni-Preference}, a large-scale dataset built via a fully automated pipeline: we synthesize candidate response pairs by contrasting models of different capabilities, and use strong teacher models to \emph{reconcile and filter} preferences while providing a modality-aware \emph{rubric-grounded rationale} for each pair. This eliminates the need for human-labeled training preferences. Omni-RRM is trained in two stages: supervised fine-tuning to learn the rubric-grounded outputs, followed by reinforcement learning (GRPO) to sharpen discrimination on difficult, low-contrast pairs. Comprehensive evaluations show that Omni-RRM achieves state-of-the-art accuracy on video (80.2\% on ShareGPT-V) and audio (66.8\% on Audio-HH-RLHF) benchmarks, and substantially outperforms existing open-source RMs on image tasks, with a 17.7\% absolute gain over its base model on overall accuracy. Omni-RRM also improves downstream performance via Best-of-$N$ selection and transfers to text-only preference benchmarks. Our data, code, and models are available at https://anonymous.4open.science/r/Omni-RRM-CC08.
MiniCPM4: Ultra-Efficient LLMs on End Devices
Jun 09, 2025



This paper introduces MiniCPM4, a highly efficient large language model (LLM) designed explicitly for end-side devices. We achieve this efficiency through systematic innovation in four key dimensions: model architecture, training data, training algorithms, and inference systems. Specifically, in terms of model architecture, we propose InfLLM v2, a trainable sparse attention mechanism that accelerates both prefilling and decoding phases for long-context processing. Regarding training data, we propose UltraClean, an efficient and accurate pre-training data filtering and generation strategy, and UltraChat v2, a comprehensive supervised fine-tuning dataset. These datasets enable satisfactory model performance to be achieved using just 8 trillion training tokens. Regarding training algorithms, we propose ModelTunnel v2 for efficient pre-training strategy search, and improve existing post-training methods by introducing chunk-wise rollout for load-balanced reinforcement learning and data-efficient tenary LLM, BitCPM. Regarding inference systems, we propose CPM.cu that integrates sparse attention, model quantization, and speculative sampling to achieve efficient prefilling and decoding. To meet diverse on-device requirements, MiniCPM4 is available in two versions, with 0.5B and 8B parameters, respectively. Sufficient evaluation results show that MiniCPM4 outperforms open-source models of similar size across multiple benchmarks, highlighting both its efficiency and effectiveness. Notably, MiniCPM4-8B demonstrates significant speed improvements over Qwen3-8B when processing long sequences. Through further adaptation, MiniCPM4 successfully powers diverse applications, including trustworthy survey generation and tool use with model context protocol, clearly showcasing its broad usability.
A Survey on Efficient Inference for Large Language Models
Apr 22, 2024Large Language Models (LLMs) have attracted extensive attention due to their remarkable performance across various tasks. However, the substantial computational and memory requirements of LLM inference pose challenges for deployment in resource-constrained scenarios. Efforts within the field have been directed towards developing techniques aimed at enhancing the efficiency of LLM inference. This paper presents a comprehensive survey of the existing literature on efficient LLM inference. We start by analyzing the primary causes of the inefficient LLM inference, i.e., the large model size, the quadratic-complexity attention operation, and the auto-regressive decoding approach. Then, we introduce a comprehensive taxonomy that organizes the current literature into data-level, model-level, and system-level optimization. Moreover, the paper includes comparative experiments on representative methods within critical sub-fields to provide quantitative insights. Last but not least, we provide some knowledge summary and discuss future research directions.
Skeleton-of-Thought: Large Language Models Can Do Parallel Decoding
Jul 28, 2023This work aims at decreasing the end-to-end generation latency of large language models (LLMs). One of the major causes of the high generation latency is the sequential decoding approach adopted by almost all state-of-the-art LLMs. In this work, motivated by the thinking and writing process of humans, we propose "Skeleton-of-Thought" (SoT), which guides LLMs to first generate the skeleton of the answer, and then conducts parallel API calls or batched decoding to complete the contents of each skeleton point in parallel. Not only does SoT provide considerable speed-up (up to 2.39x across 11 different LLMs), but it can also potentially improve the answer quality on several question categories in terms of diversity and relevance. SoT is an initial attempt at data-centric optimization for efficiency, and reveal the potential of pushing LLMs to think more like a human for answer quality.
Dynamic Ensemble of Low-fidelity Experts: Mitigating NAS "Cold-Start"
Feb 02, 2023Predictor-based Neural Architecture Search (NAS) employs an architecture performance predictor to improve the sample efficiency. However, predictor-based NAS suffers from the severe ``cold-start'' problem, since a large amount of architecture-performance data is required to get a working predictor. In this paper, we focus on exploiting information in cheaper-to-obtain performance estimations (i.e., low-fidelity information) to mitigate the large data requirements of predictor training. Despite the intuitiveness of this idea, we observe that using inappropriate low-fidelity information even damages the prediction ability and different search spaces have different preferences for low-fidelity information types. To solve the problem and better fuse beneficial information provided by different types of low-fidelity information, we propose a novel dynamic ensemble predictor framework that comprises two steps. In the first step, we train different sub-predictors on different types of available low-fidelity information to extract beneficial knowledge as low-fidelity experts. In the second step, we learn a gating network to dynamically output a set of weighting coefficients conditioned on each input neural architecture, which will be used to combine the predictions of different low-fidelity experts in a weighted sum. The overall predictor is optimized on a small set of actual architecture-performance data to fuse the knowledge from different low-fidelity experts to make the final prediction. We conduct extensive experiments across five search spaces with different architecture encoders under various experimental settings. Our method can easily be incorporated into existing predictor-based NAS frameworks to discover better architectures.
CLOSE: Curriculum Learning On the Sharing Extent Towards Better One-shot NAS
Jul 16, 2022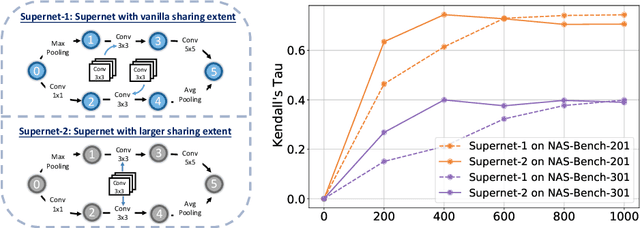
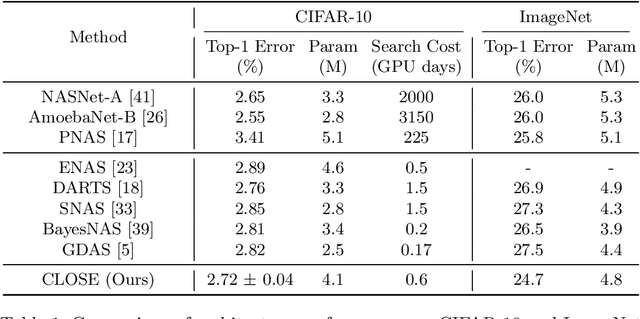
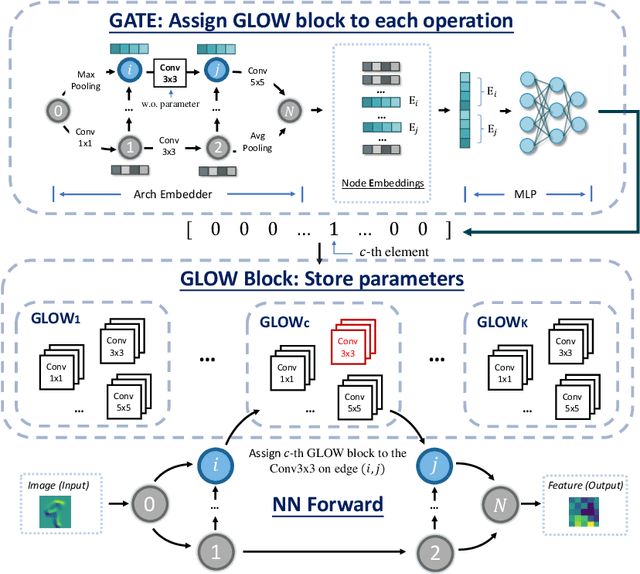

One-shot Neural Architecture Search (NAS) has been widely used to discover architectures due to its efficiency. However, previous studies reveal that one-shot performance estimations of architectures might not be well correlated with their performances in stand-alone training because of the excessive sharing of operation parameters (i.e., large sharing extent) between architectures. Thus, recent methods construct even more over-parameterized supernets to reduce the sharing extent. But these improved methods introduce a large number of extra parameters and thus cause an undesirable trade-off between the training costs and the ranking quality. To alleviate the above issues, we propose to apply Curriculum Learning On Sharing Extent (CLOSE) to train the supernet both efficiently and effectively. Specifically, we train the supernet with a large sharing extent (an easier curriculum) at the beginning and gradually decrease the sharing extent of the supernet (a harder curriculum). To support this training strategy, we design a novel supernet (CLOSENet) that decouples the parameters from operations to realize a flexible sharing scheme and adjustable sharing extent. Extensive experiments demonstrate that CLOSE can obtain a better ranking quality across different computational budget constraints than other one-shot supernets, and is able to discover superior architectures when combined with various search strategies. Code is available at https://github.com/walkerning/aw_nas.
A Surgery of the Neural Architecture Evaluators
Aug 12, 2020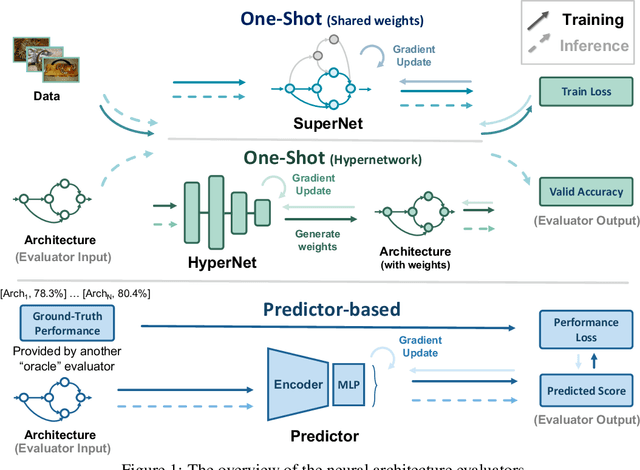
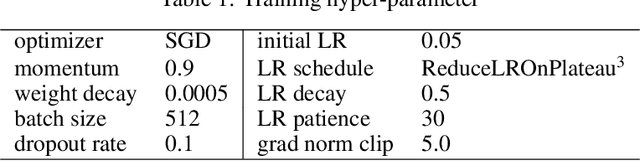
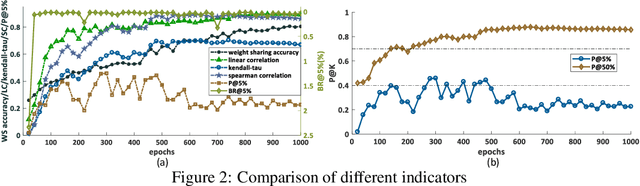

Neural architecture search (NAS) recently received extensive attention due to its effectiveness in automatically designing effective neural architectures. A major challenge in NAS is to conduct a fast and accurate evaluation of neural architectures. Commonly used fast architecture evaluators include one-shot evaluators (including weight sharing and hypernet-based ones) and predictor-based evaluators. Despite their high evaluation efficiency, the evaluation correlation of these evaluators is still questionable. In this paper, we conduct an extensive assessment of both the one-shot and predictor-based evaluator on the NAS-Bench-201 benchmark search space, and break up how and why different factors influence the evaluation correlation and other NAS-oriented criteria. Codes are available at https://github.com/walkerning/aw_nas.