 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Physics-Consistent Material Behavior Without Prior Knowledge
Jul 25, 2024



Accurately modeling the mechanical behavior of materials is crucial for numerous engineering applications. The quality of these models depends directly on the accuracy of the constitutive law that defines the stress-strain relation. Discovering these constitutive material laws remains a significant challenge, in particular when only material deformation data is available. To address this challenge, unsupervised machine learning methods have been proposed. However, existing approaches have several limitations: they either fail to ensure that the learned constitutive relations are consistent with physical principles, or they rely on a predefined library of constitutive relations or manually crafted input features. These dependencies require significant expertise and specialized domain knowledge. Here, we introduce a machine learning approach called uLED, which overcomes the limitations by using the input convex neural network (ICNN) as the surrogate constitutive model. We improve the optimization strategy for training ICNN, allowing it to be trained end-to-end using direct strain invariants as input across various materials. Furthermore, we utilize the nodal force equilibrium at the internal domain as the training objective, which enables us to learn the constitutive relation solely from temporal displacement recordings. We validate the effectiveness of the proposed method on a diverse range of material laws. We demonstrate that it is robust to a significant level of noise and that it converges to the ground truth with increasing data resolution. We also show that the model can be effectively trained using a displacement field from a subdomain of the test specimen and that the learned constitutive relation from one material sample is transferable to other samples with different geometries. The developed methodology provides an effective tool for discovering constitutive relations.
Learning to Plan Maneuverable and Agile Flight Trajectory with Optimization Embedded Networks
May 13, 2024


In recent times, an increasing number of researchers have been devoted to utilizing deep neural networks for end-to-end flight navigation. This approach has gained traction due to its ability to bridge the gap between perception and planning that exists in traditional methods, thereby eliminating delays between modules. However, the practice of replacing original modules with neural networks in a black-box manner diminishes the overall system's robustness and stability. It lacks principled explanations and often fails to consistently generate high-quality motion trajectories. Furthermore, such methods often struggle to rigorously account for the robot's kinematic constraints, resulting in the generation of trajectories that cannot be executed satisfactorily. In this work, we combine the advantages of traditional methods and neural networks by proposing an optimization-embedded neural network. This network can learn high-quality trajectories directly from visual inputs without the need of mapping, while ensuring dynamic feasibility. Here, the deep neural network is employed to directly extract environment safety regions from depth images. Subsequently, we employ a model-based approach to represent these regions as safety constraints in trajectory optimization. Leveraging the availability of highly efficient optimization algorithms, our method robustly converges to feasible and optimal solutions that satisfy various user-defined constraints. Moreover, we differentiate the optimization process, allowing it to be trained as a layer within the neural network. This approach facilitates the direct interaction between perception and planning, enabling the network to focus more on the spatial regions where optimal solutions exist. As a result, it further enhances the quality and stability of the generated trajectories.
Collaborative Planning for Catching and Transporting Objects in Unstructured Environments
Nov 13, 2023



Multi-robot teams have attracted attention from industry and academia for their ability to perform collaborative tasks in unstructured environments, such as wilderness rescue and collaborative transportation.In this paper, we propose a trajectory planning method for a non-holonomic robotic team with collaboration in unstructured environments.For the adaptive state collaboration of a robot team to catch and transport targets to be rescued using a net, we model the process of catching the falling target with a net in a continuous and differentiable form.This enables the robot team to fully exploit the kinematic potential, thereby adaptively catching the target in an appropriate state.Furthermore, the size safety and topological safety of the net, resulting from the collaborative support of the robots, are guaranteed through geometric constraints.We integrate our algorithm on a car-like robot team and test it in simulations and real-world experiments to validate our performance.Our method is compared to state-of-the-art multi-vehicle trajectory planning methods, demonstrating significant performance in efficiency and trajectory quality.
An Efficient Trajectory Planner for Car-like Robots on Uneven Terrain
Sep 12, 2023



Autonomous navigation of ground robots on uneven terrain is being considered in more and more tasks. However, uneven terrain will bring two problems to motion planning: how to assess the traversability of the terrain and how to cope with the dynamics model of the robot associated with the terrain. The trajectories generated by existing methods are often too conservative or cannot be tracked well by the controller since the second problem is not well solved. In this paper, we propose terrain pose mapping to describe the impact of terrain on the robot. With this mapping, we can obtain the SE(3) state of the robot on uneven terrain for a given state in SE(2). Then, based on it, we present a trajectory optimization framework for car-like robots on uneven terrain that can consider both of the above problems. The trajectories generated by our method conform to the dynamics model of the system without being overly conservative and yet able to be tracked well by the controller. We perform simulations and real-world experiments to validate the efficiency and trajectory quality of our algorithm.
BenchTemp: A General Benchmark for Evaluating Temporal Graph Neural Networks
Aug 31, 2023To handle graphs in which features or connectivities are evolving over time, a series of temporal graph neural networks (TGNNs) have been proposed. Despite the success of these TGNNs, the previous TGNN evaluations reveal several limitations regarding four critical issues: 1) inconsistent datasets, 2) inconsistent evaluation pipelines, 3) lacking workload diversity, and 4) lacking efficient comparison. Overall, there lacks an empirical study that puts TGNN models onto the same ground and compares them comprehensively. To this end, we propose BenchTemp, a general benchmark for evaluating TGNN models on various workloads. BenchTemp provides a set of benchmark datasets so that different TGNN models can be fairly compared. Further, BenchTemp engineers a standard pipeline that unifies the TGNN evaluation. With BenchTemp, we extensively compare the representative TGNN models on different tasks (e.g., link prediction and node classification) and settings (transductive and inductive), w.r.t. both effectiveness and efficiency metrics. We have made BenchTemp publicly available at https://github.com/qianghuangwhu/benchtemp.
Collective Relational Inference for learning physics-consistent heterogeneous particle interactions
Apr 30, 2023Interacting particle systems are ubiquitous in nature and engineering. Revealing particle interaction laws is of fundamental importance but also particularly challenging due to underlying configurational complexities. Recently developed machine learning methods show great potential in discovering pairwise interactions from particle trajectories in homogeneous systems. However, they fail to reveal interactions in heterogeneous systems that are prevalent in reality, where multiple interaction types coexist simultaneously and relational inference is required. Here, we propose a novel probabilistic method for relational inference, which possesses two distinctive characteristics compared to existing methods. First, it infers the interaction types of different edges collectively, and second, it uses a physics-induced graph neural network to learn physics-consistent pairwise interactions. We evaluate the proposed methodology across several benchmark datasets and demonstrate that it is consistent with the underlying physics. Furthermore, we showcase its ability to outperform existing methods in accurately inferring interaction types. In addition, the proposed model is data-efficient and generalizable to large systems when trained on smaller ones, which contrasts with previously proposed solutions. The developed methodology constitutes a key element for the discovery of the fundamental laws that determine macroscopic mechanical properties of particle systems.
Decentralized Planning for Car-Like Robotic Swarm in Unstructured Environments
Oct 12, 2022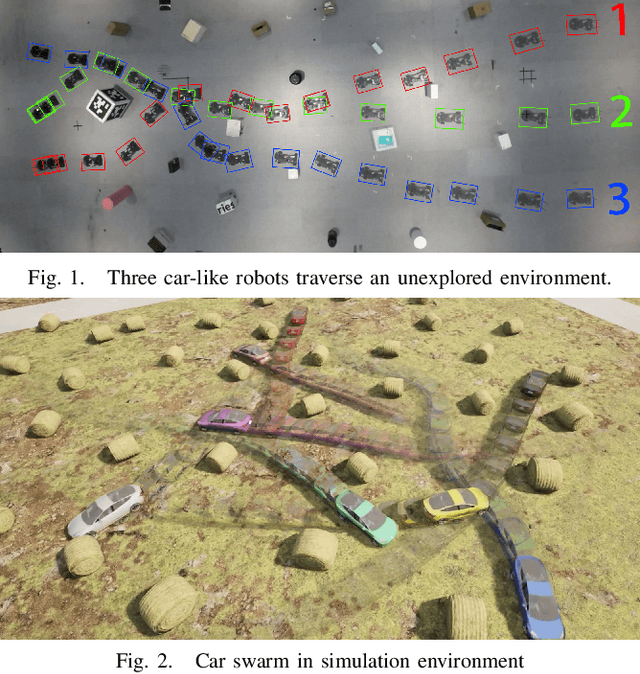
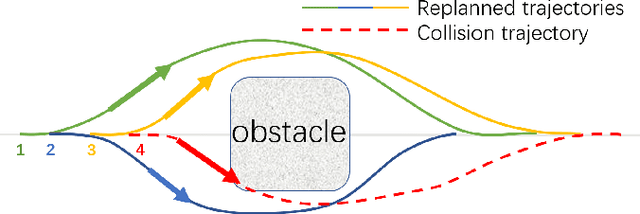
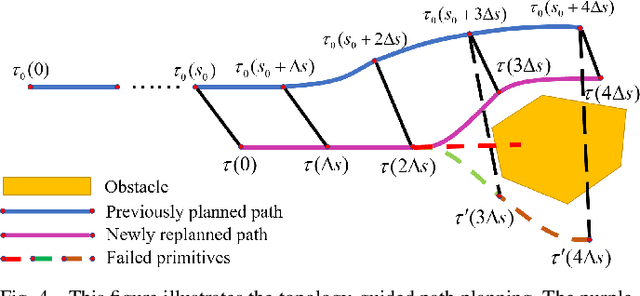
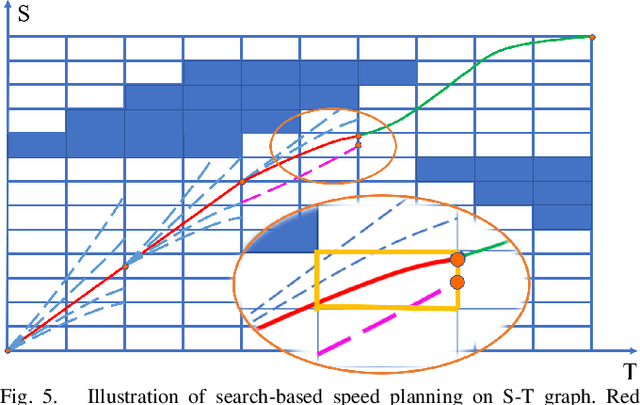
Robot swarm is a hot spot in robotic research community. In this paper, we propose a decentralized framework for car-like robotic swarm which is capable of real-time planning in unstructured environments. In this system, path finding is guided by environmental topology information to avoid frequent topological change, and search-based speed planning is leveraged to escape from infeasible initial value's local minima. Then spatial-temporal optimization is employed to generate a safe, smooth and dynamically feasible trajectory. During optimization, penalty is imposed on signed distance between agents to realize collision avoidance, and differential flatness cooperated with limitation on front steer angle satisfies the non-holonomic constraints. With trajectories broadcast to the wireless network, agents are able to check and prevent from potential collisions. We validate the robustness of our system in simulation and real-world experiments. Code will be released as open-source packages.
Differential Flatness-Based Trajectory Planning for Autonomous Vehicles
Aug 28, 2022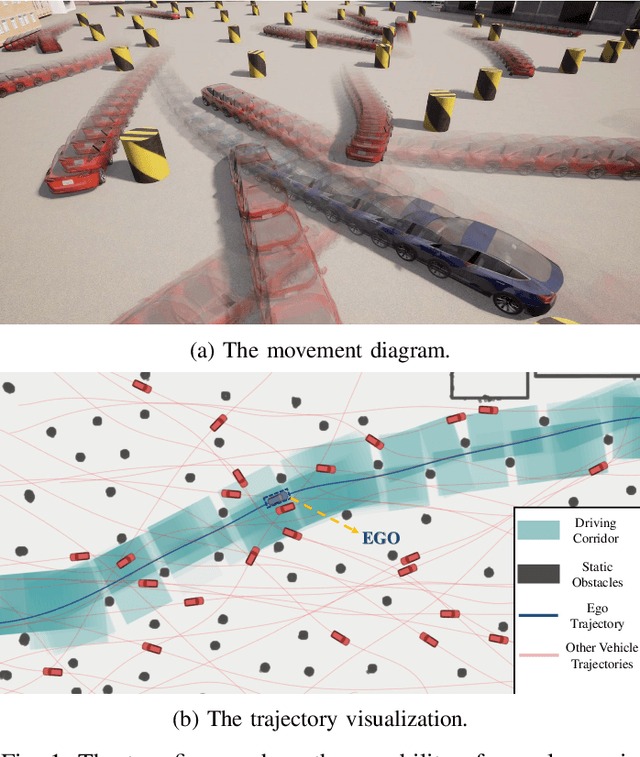
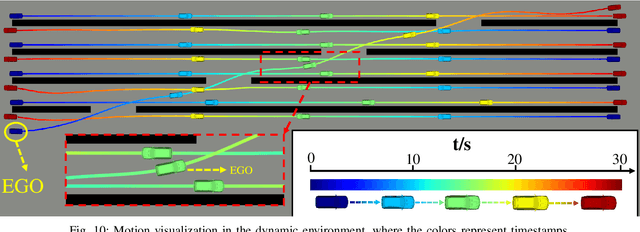
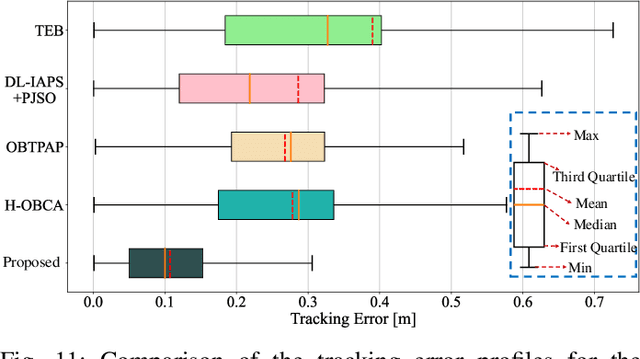
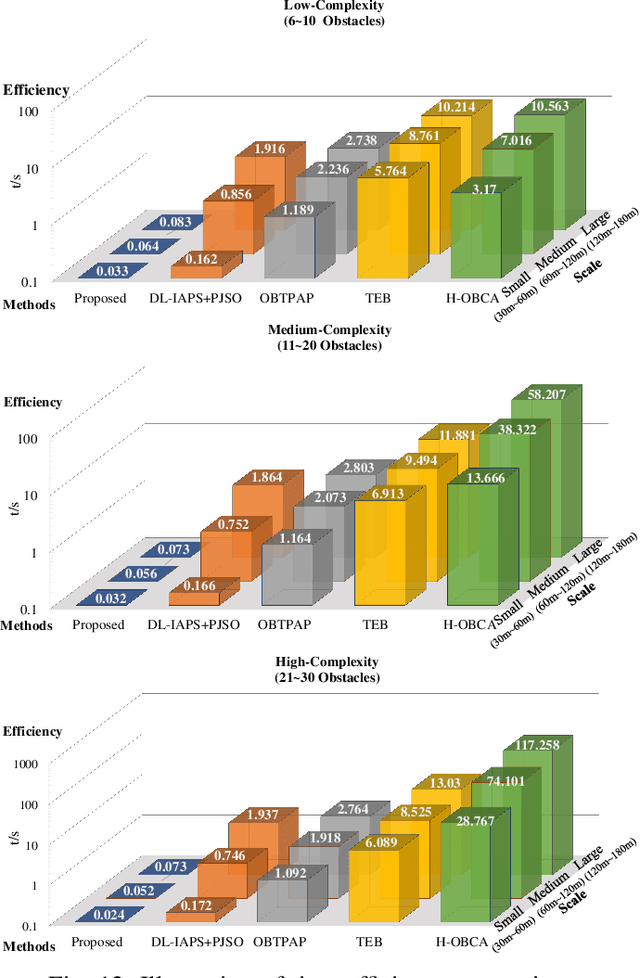
As a core part of autonomous driving systems, motion planning has received extensive attention from academia and industry. However, there is no efficient trajectory planning solution capable of spatial-temporal joint optimization due to nonholonomic dynamics, particularly in the presence of unstructured environments and dynamic obstacles. To bridge the gap, we propose a versatile and real-time trajectory optimization method that can generate a high-quality feasible trajectory using a full vehicle model under arbitrary constraints. By leveraging the differential flatness property of car-like robots, we use flat outputs to analytically formulate all feasibility constraints to simplify the trajectory planning problem. Moreover, obstacle avoidance is achieved with full dimensional polygons to generate less conservative trajectories with safety guarantees, especially in tightly constrained spaces. We present comprehensive benchmarks with cutting-edge methods, demonstrating the significance of the proposed method in terms of efficiency and trajectory quality. Real-world experiments verify the practicality of our algorithm. We will release our codes as open-source packages with the purpose for the reference of the research community.
BRIGHT -- Graph Neural Networks in Real-Time Fraud Detection
May 25, 2022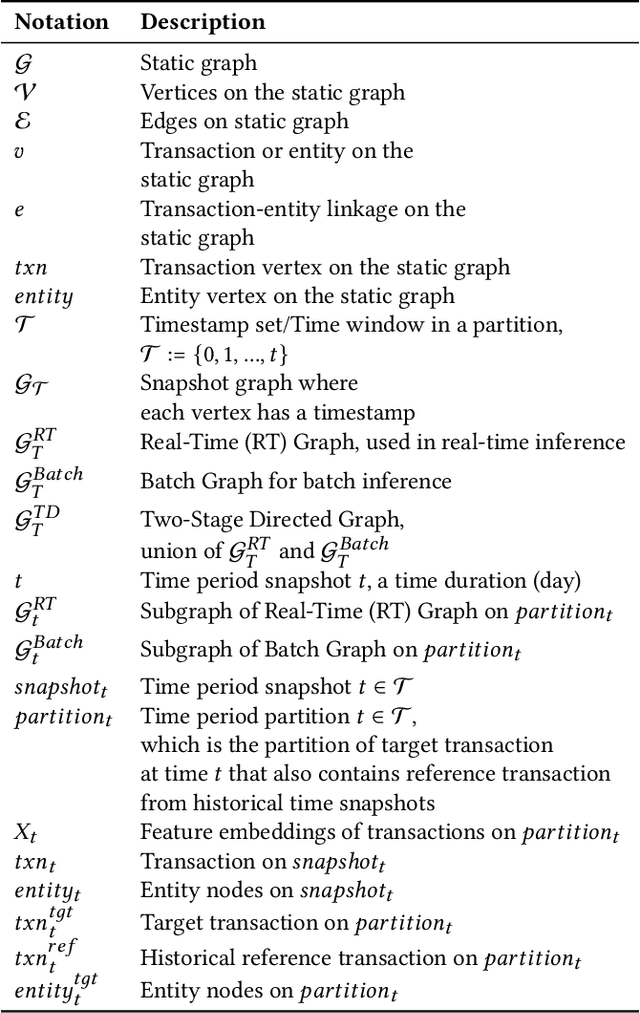
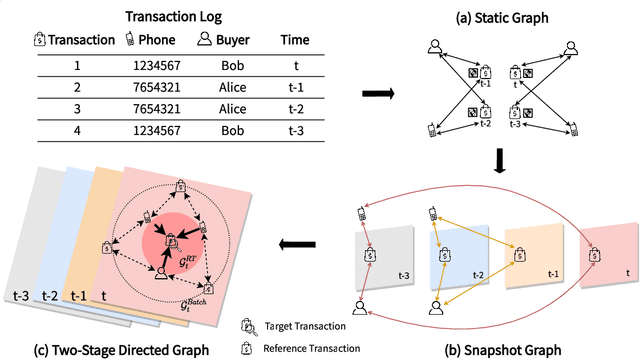
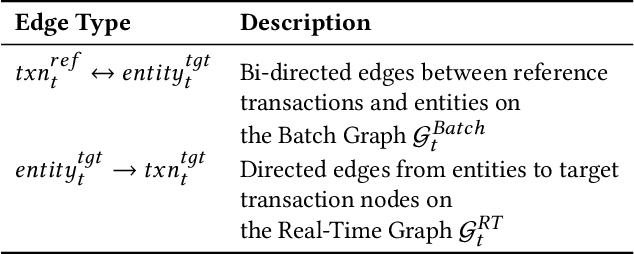
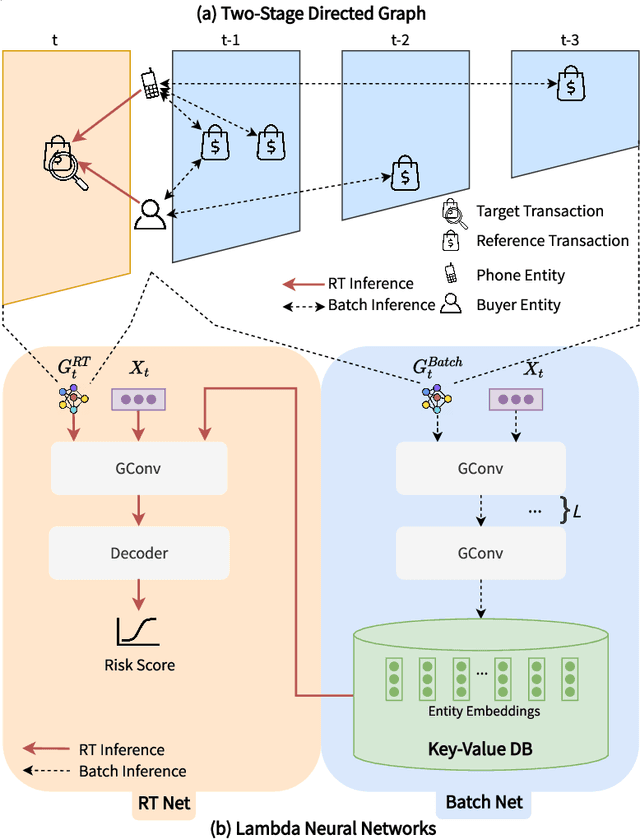
Detecting fraudulent transactions is an essential component to control risk in e-commerce marketplaces. Apart from rule-based and machine learning filters that are already deployed in production, we want to enable efficient real-time inference with graph neural networks (GNNs), which is useful to catch multihop risk propagation in a transaction graph. However, two challenges arise in the implementation of GNNs in production. First, future information in a dynamic graph should not be considered in message passing to predict the past. Second, the latency of graph query and GNN model inference is usually up to hundreds of milliseconds, which is costly for some critical online services. To tackle these challenges, we propose a Batch and Real-time Inception GrapH Topology (BRIGHT) framework to conduct an end-to-end GNN learning that allows efficient online real-time inference. BRIGHT framework consists of a graph transformation module (Two-Stage Directed Graph) and a corresponding GNN architecture (Lambda Neural Network). The Two-Stage Directed Graph guarantees that the information passed through neighbors is only from the historical payment transactions. It consists of two subgraphs representing historical relationships and real-time links, respectively. The Lambda Neural Network decouples inference into two stages: batch inference of entity embeddings and real-time inference of transaction prediction. Our experiments show that BRIGHT outperforms the baseline models by >2\% in average w.r.t.~precision. Furthermore, BRIGHT is computationally efficient for real-time fraud detection. Regarding end-to-end performance (including neighbor query and inference), BRIGHT can reduce the P99 latency by >75\%. For the inference stage, our speedup is on average 7.8$\times$ compared to the traditional GNN.
Modelling graph dynamics in fraud detection with "Attention"
Apr 22, 2022At online retail platforms, detecting fraudulent accounts and transactions is crucial to improve customer experience, minimize loss, and avoid unauthorized transactions. Despite the variety of different models for deep learning on graphs, few approaches have been proposed for dealing with graphs that are both heterogeneous and dynamic. In this paper, we propose DyHGN (Dynamic Heterogeneous Graph Neural Network) and its variants to capture both temporal and heterogeneous information. We first construct dynamic heterogeneous graphs from registration and transaction data from eBay. Then, we build models with diachronic entity embedding and heterogeneous graph transformer. We also use model explainability techniques to understand the behaviors of DyHGN-* models. Our findings reveal that modelling graph dynamics with heterogeneous inputs need to be conducted with "attention" depending on the data structure, distribution, and computation cost.