 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSparse-Graph-Enabled Formation Planning for Large-Scale Aerial Swarms
Mar 26, 2024



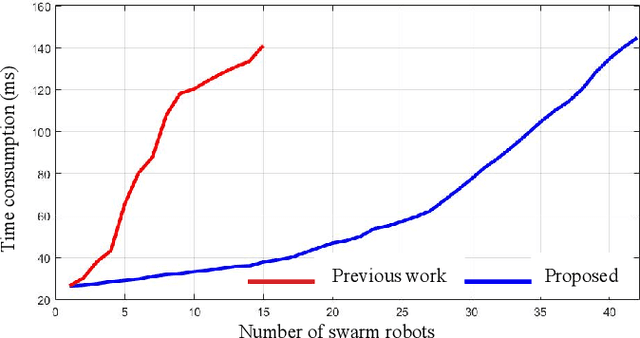
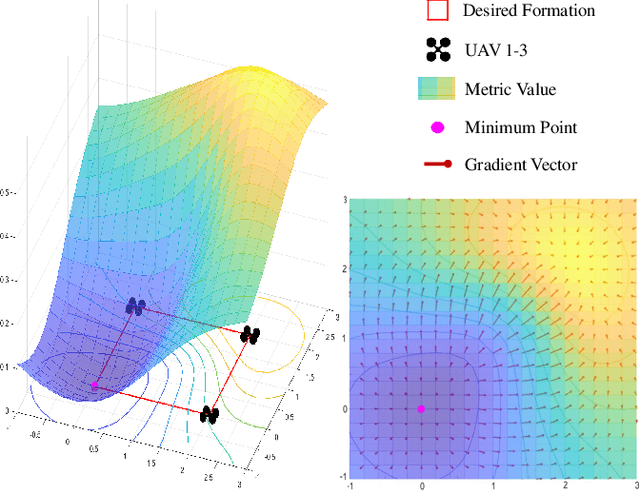
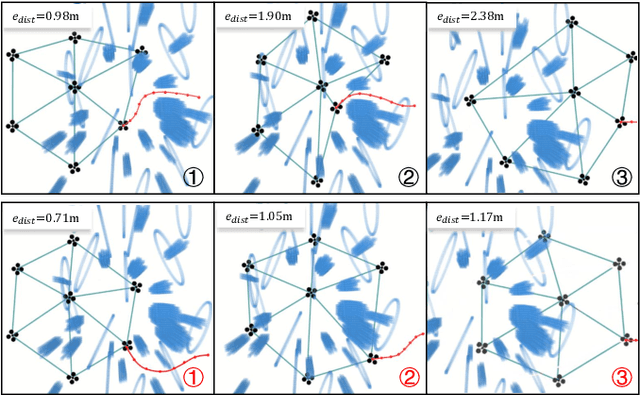
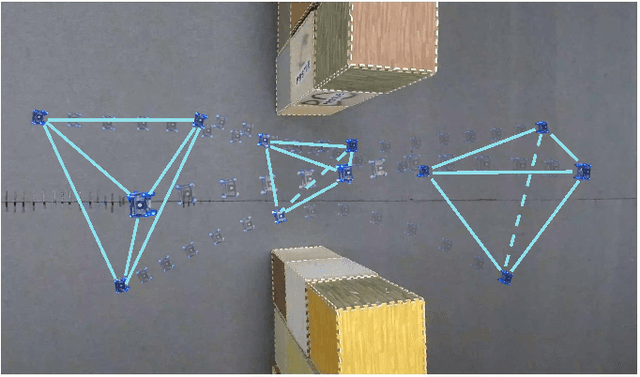
The formation trajectory planning using complete graphs to model collaborative constraints becomes computationally intractable as the number of drones increases due to the curse of dimensionality. To tackle this issue, this paper presents a sparse graph construction method for formation planning to realize better efficiency-performance trade-off. Firstly, a sparsification mechanism for complete graphs is designed to ensure the global rigidity of sparsified graphs, which is a necessary condition for uniquely corresponding to a geometric shape. Secondly, a good sparse graph is constructed to preserve the main structural feature of complete graphs sufficiently. Since the graph-based formation constraint is described by Laplacian matrix, the sparse graph construction problem is equivalent to submatrix selection, which has combinatorial time complexity and needs a scoring metric. Via comparative simulations, the Max-Trace matrix-revealing metric shows the promising performance. The sparse graph is integrated into the formation planning. Simulation results with 72 drones in complex environments demonstrate that when preserving 30\% connection edges, our method has comparative formation error and recovery performance w.r.t. complete graphs. Meanwhile, the planning efficiency is improved by approximate an order of magnitude. Benchmark comparisons and ablation studies are conducted to fully validate the merits of our method.
Collaborative Planning for Catching and Transporting Objects in Unstructured Environments
Nov 13, 2023



Multi-robot teams have attracted attention from industry and academia for their ability to perform collaborative tasks in unstructured environments, such as wilderness rescue and collaborative transportation.In this paper, we propose a trajectory planning method for a non-holonomic robotic team with collaboration in unstructured environments.For the adaptive state collaboration of a robot team to catch and transport targets to be rescued using a net, we model the process of catching the falling target with a net in a continuous and differentiable form.This enables the robot team to fully exploit the kinematic potential, thereby adaptively catching the target in an appropriate state.Furthermore, the size safety and topological safety of the net, resulting from the collaborative support of the robots, are guaranteed through geometric constraints.We integrate our algorithm on a car-like robot team and test it in simulations and real-world experiments to validate our performance.Our method is compared to state-of-the-art multi-vehicle trajectory planning methods, demonstrating significant performance in efficiency and trajectory quality.
Formation Flight in Dense Environments
Oct 08, 2022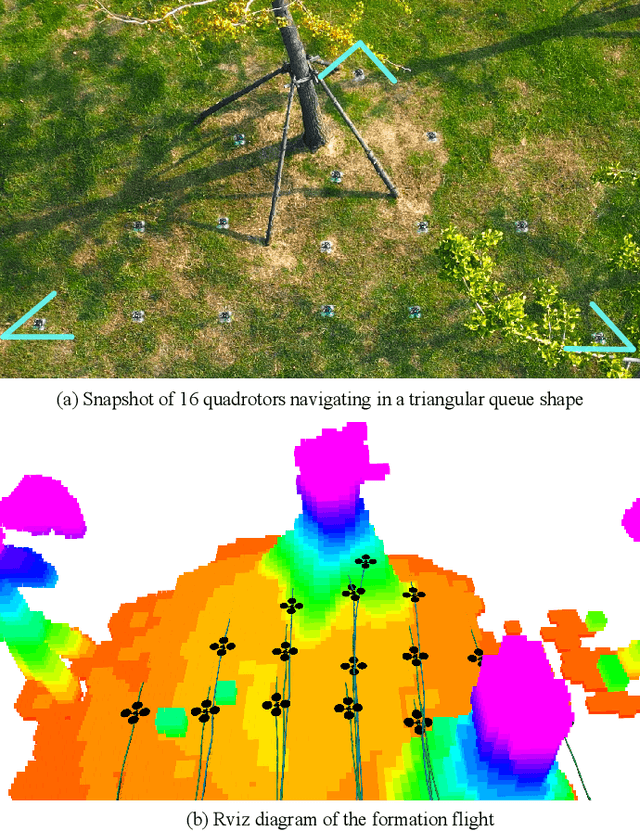
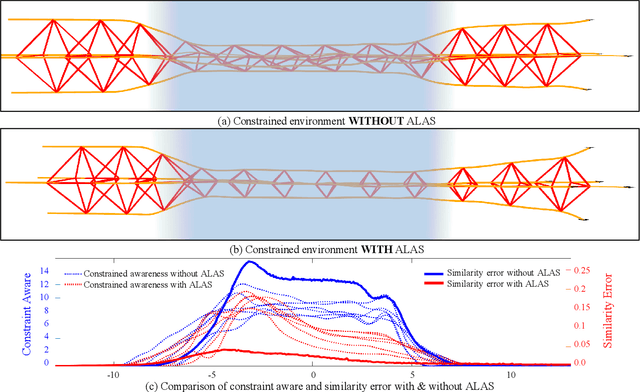
Formation flight has a vast potential for aerial robot swarms in various applications. However, existing methods lack the capability to achieve fully autonomous large-scale formation flight in dense environments. To bridge the gap, we present a complete formation flight system that effectively integrates real-world constraints into aerial formation navigation. This paper proposes a differentiable graph-based metric to quantify the overall similarity error between formations. This metric is invariant to rotation, translation, and scaling, providing more freedom for formation coordination. We design a distributed trajectory optimization framework that considers formation similarity, obstacle avoidance, and dynamic feasibility. The optimization is decoupled to make large-scale formation flights computationally feasible. To improve the elasticity of formation navigation in highly constrained scenes, we present a swarm reorganization method which adaptively adjusts the formation parameters and task assignments by generating local navigation goals. A novel swarm agreement strategy called global-remap-local-replan and a formation-level path planner is proposed in this work to coordinate the swarm global planning and local trajectory optimizations efficiently. To validate the proposed method, we design comprehensive benchmarks and simulations with other cutting-edge works in terms of adaptability, predictability, elasticity, resilience, and efficiency. Finally, integrated with palm-sized swarm platforms with onboard computers and sensors, the proposed method demonstrates its efficiency and robustness by achieving the largest scale formation flight in dense outdoor environments.
Distributed Swarm Trajectory Optimization for Formation Flight in Dense Environments
Sep 16, 2021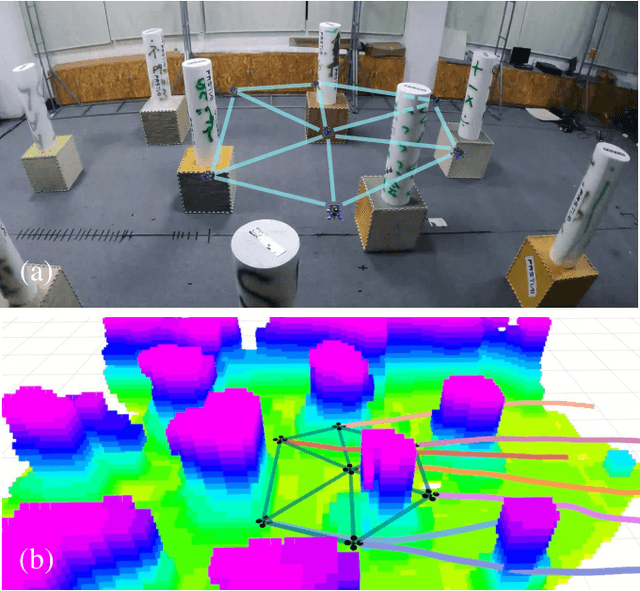
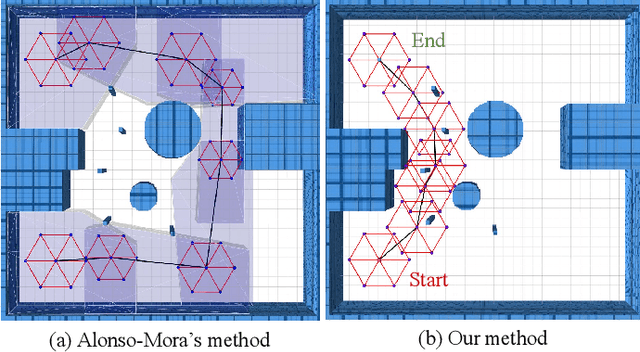
For aerial swarms, navigation in a prescribed formation is widely practiced in various scenarios. However, the associated planning strategies typically lack the capability of avoiding obstacles in cluttered environments. To address this deficiency, we present an optimization-based method that ensures collision-free trajectory generation for formation flight. In this paper, a novel differentiable metric is proposed to quantify the overall similarity distance between formations. We then formulate this metric into an optimization framework, which achieves spatial-temporal planning using polynomial trajectories. Minimization over collision penalty is also incorporated into the framework, so that formation preservation and obstacle avoidance can be handled simultaneously. To validate the efficiency of our method, we conduct benchmark comparisons with other cutting-edge works. Integrated with an autonomous distributed aerial swarm system, the proposed method demonstrates its efficiency and robustness in real-world experiments with obstacle-rich surroundings. We will release the source code for the reference of the community.
EVA-Planner: Environmental Adaptive Quadrotor Planning
Nov 09, 2020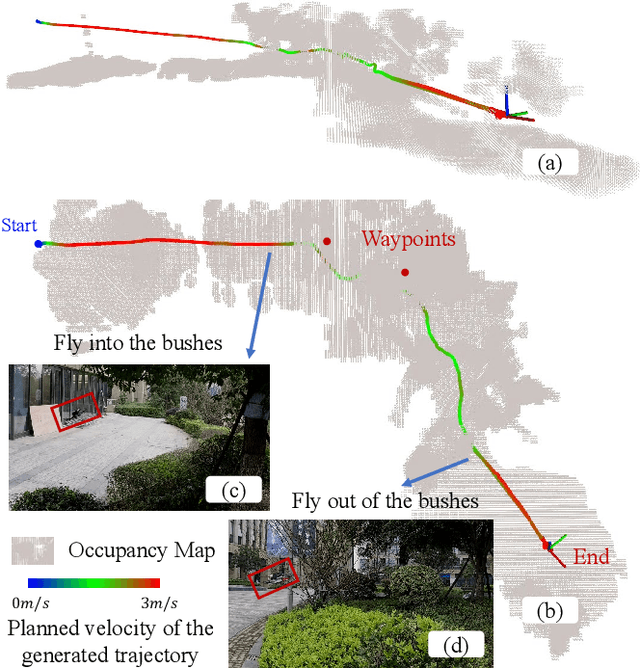
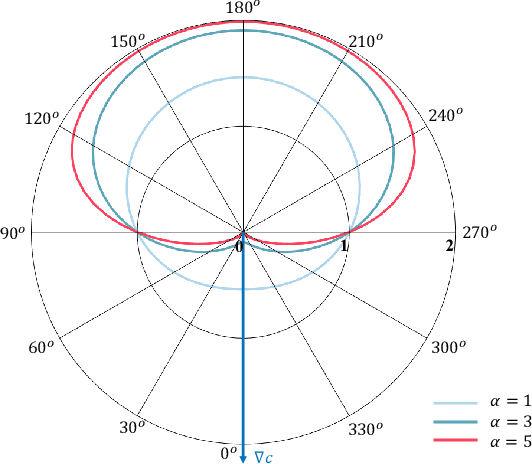
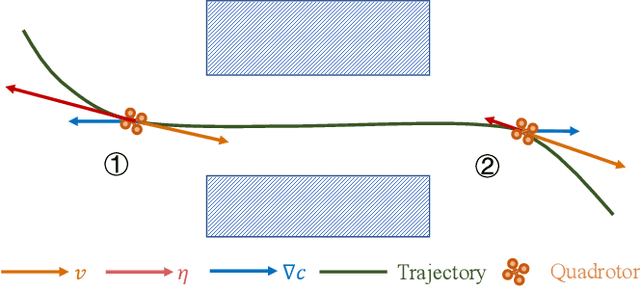
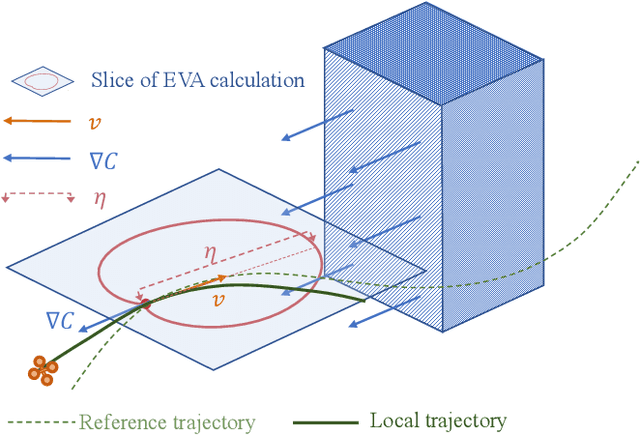
Due to its superior agility and flexibility, quadrotor is popularly used in challenging environments. In these scenarios, trajectory planning plays a vital role in generating safe motions to avoid obstacles while ensuring flight smoothness. Although many works on quadrotor planning have been proposed, a research gap exists in incorporating self-adaptation into a planning framework to enable a drone to automatically fly slower in denser environments and increase its speed in a safer area. In this paper, we propose an environmental adaptive planner that effectively adjusts the flight aggressiveness based on the obstacle distribution and quadrotor state. Firstly, we design an environmental adaptive safety-aware method to assign the priority of obstacles according to the environmental risk level and instantaneous motion tendency. Then, we apply it into a multi-layered model predictive contouring control framework to generate adaptive, safe, and dynamical feasible local trajectories. Extensive simulations and real-world experiments verify our planning framework's efficiency and robustness and show superior performances in the benchmark comparison. Moreover, we will release our planning framework as open-source ros-packages.