 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGallant: Voxel Grid-based Humanoid Locomotion and Local-navigation across 3D Constrained Terrains
Nov 18, 2025Robust humanoid locomotion requires accurate and globally consistent perception of the surrounding 3D environment. However, existing perception modules, mainly based on depth images or elevation maps, offer only partial and locally flattened views of the environment, failing to capture the full 3D structure. This paper presents Gallant, a voxel-grid-based framework for humanoid locomotion and local navigation in 3D constrained terrains. It leverages voxelized LiDAR data as a lightweight and structured perceptual representation, and employs a z-grouped 2D CNN to map this representation to the control policy, enabling fully end-to-end optimization. A high-fidelity LiDAR simulation that dynamically generates realistic observations is developed to support scalable, LiDAR-based training and ensure sim-to-real consistency. Experimental results show that Gallant's broader perceptual coverage facilitates the use of a single policy that goes beyond the limitations of previous methods confined to ground-level obstacles, extending to lateral clutter, overhead constraints, multi-level structures, and narrow passages. Gallant also firstly achieves near 100% success rates in challenging scenarios such as stair climbing and stepping onto elevated platforms through improved end-to-end optimization.
Implicit Swept Volume SDF: Enabling Continuous Collision-Free Trajectory Generation for Arbitrary Shapes
May 01, 2024



In the field of trajectory generation for objects, ensuring continuous collision-free motion remains a huge challenge, especially for non-convex geometries and complex environments. Previous methods either oversimplify object shapes, which results in a sacrifice of feasible space or rely on discrete sampling, which suffers from the "tunnel effect". To address these limitations, we propose a novel hierarchical trajectory generation pipeline, which utilizes the Swept Volume Signed Distance Field (SVSDF) to guide trajectory optimization for Continuous Collision Avoidance (CCA). Our interdisciplinary approach, blending techniques from graphics and robotics, exhibits outstanding effectiveness in solving this problem. We formulate the computation of the SVSDF as a Generalized Semi-Infinite Programming model, and we solve for the numerical solutions at query points implicitly, thereby eliminating the need for explicit reconstruction of the surface. Our algorithm has been validated in a variety of complex scenarios and applies to robots of various dynamics, including both rigid and deformable shapes. It demonstrates exceptional universality and superior CCA performance compared to typical algorithms. The code will be released at https://github.com/ZJU-FAST-Lab/Implicit-SVSDF-Planner for the benefit of the community.
Continuous Implicit SDF Based Any-shape Robot Trajectory Optimization
Mar 02, 2023



Optimization-based trajectory generation methods are widely used in whole-body planning for robots. However, existing work either oversimplifies the robot's geometry and environment representation, resulting in a conservative trajectory, or suffers from a huge overhead in maintaining additional information such as the Signed Distance Field (SDF). To bridge the gap, we consider the robot as an implicit function, with its surface boundary represented by the zero-level set of its SDF. Based on this, we further employ another implicit function to lazily compute the signed distance to the swept volume generated by the robot and its trajectory. The computation is efficient by exploiting continuity in space-time, and the implicit function guarantees precise and continuous collision evaluation even for nonconvex robots with complex surfaces. Furthermore, we propose a trajectory optimization pipeline applicable to the implicit SDF. Simulation and real-world experiments validate the high performance of our approach for arbitrarily shaped robot trajectory optimization.
Towards Efficient Trajectory Generation for Ground Robots beyond 2D Environment
Feb 07, 2023



With the development of robotics, ground robots are no longer limited to planar motion. Passive height variation due to complex terrain and active height control provided by special structures on robots require a more general navigation planning framework beyond 2D. Existing methods rarely considers both simultaneously, limiting the capabilities and applications of ground robots. In this paper, we proposed an optimization-based planning framework for ground robots considering both active and passive height changes on the z-axis. The proposed planner first constructs a penalty field for chassis motion constraints defined in R3 such that the optimal solution space of the trajectory is continuous, resulting in a high-quality smooth chassis trajectory. Also, by constructing custom constraints in the z-axis direction, it is possible to plan trajectories for different types of ground robots which have z-axis degree of freedom. We performed simulations and realworld experiments to verify the efficiency and trajectory quality of our algorithm.
Decentralized Planning for Car-Like Robotic Swarm in Unstructured Environments
Oct 12, 2022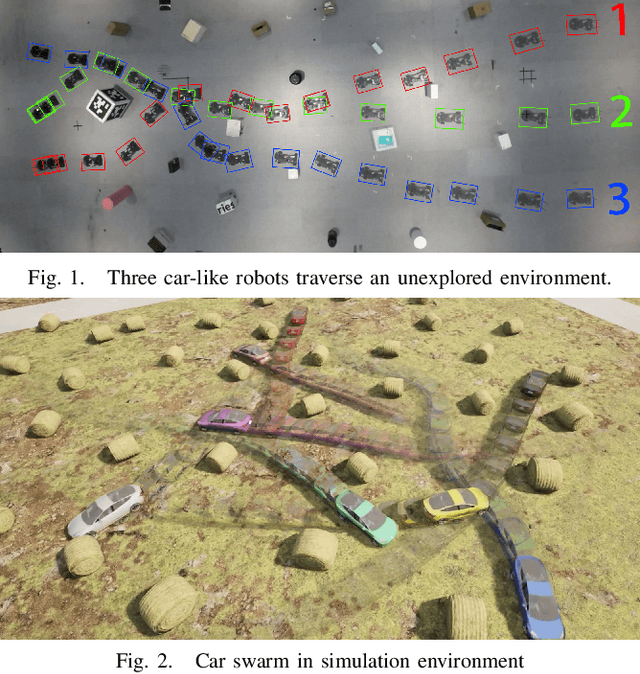
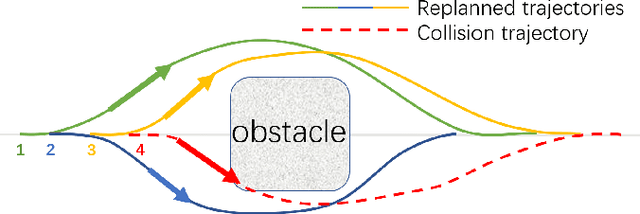
Robot swarm is a hot spot in robotic research community. In this paper, we propose a decentralized framework for car-like robotic swarm which is capable of real-time planning in unstructured environments. In this system, path finding is guided by environmental topology information to avoid frequent topological change, and search-based speed planning is leveraged to escape from infeasible initial value's local minima. Then spatial-temporal optimization is employed to generate a safe, smooth and dynamically feasible trajectory. During optimization, penalty is imposed on signed distance between agents to realize collision avoidance, and differential flatness cooperated with limitation on front steer angle satisfies the non-holonomic constraints. With trajectories broadcast to the wireless network, agents are able to check and prevent from potential collisions. We validate the robustness of our system in simulation and real-world experiments. Code will be released as open-source packages.