 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLongSafetyBench: Long-Context LLMs Struggle with Safety Issues
Nov 11, 2024



With the development of large language models (LLMs), the sequence length of these models continues to increase, drawing significant attention to long-context language models. However, the evaluation of these models has been primarily limited to their capabilities, with a lack of research focusing on their safety. Existing work, such as ManyShotJailbreak, has to some extent demonstrated that long-context language models can exhibit safety concerns. However, the methods used are limited and lack comprehensiveness. In response, we introduce \textbf{LongSafetyBench}, the first benchmark designed to objectively and comprehensively evaluate the safety of long-context models. LongSafetyBench consists of 10 task categories, with an average length of 41,889 words. After testing eight long-context language models on LongSafetyBench, we found that existing models generally exhibit insufficient safety capabilities. The proportion of safe responses from most mainstream long-context LLMs is below 50\%. Moreover, models' safety performance in long-context scenarios does not always align with that in short-context scenarios. Further investigation revealed that long-context models tend to overlook harmful content within lengthy texts. We also proposed a simple yet effective solution, allowing open-source models to achieve performance comparable to that of top-tier closed-source models. We believe that LongSafetyBench can serve as a valuable benchmark for evaluating the safety capabilities of long-context language models. We hope that our work will encourage the broader community to pay attention to the safety of long-context models and contribute to the development of solutions to improve the safety of long-context LLMs.
Ask, and it shall be given: Turing completeness of prompting
Nov 04, 2024Since the success of GPT, large language models (LLMs) have been revolutionizing machine learning and have initiated the so-called LLM prompting paradigm. In the era of LLMs, people train a single general-purpose LLM and provide the LLM with different prompts to perform different tasks. However, such empirical success largely lacks theoretical understanding. Here, we present the first theoretical study on the LLM prompting paradigm to the best of our knowledge. In this work, we show that prompting is in fact Turing-complete: there exists a finite-size Transformer such that for any computable function, there exists a corresponding prompt following which the Transformer computes the function. Furthermore, we show that even though we use only a single finite-size Transformer, it can still achieve nearly the same complexity bounds as that of the class of all unbounded-size Transformers. Overall, our result reveals that prompting can enable a single finite-size Transformer to be efficiently universal, which establishes a theoretical underpinning for prompt engineering in practice.
Language Models are Graph Learners
Oct 03, 2024



Language Models (LMs) are increasingly challenging the dominance of domain-specific models, including Graph Neural Networks (GNNs) and Graph Transformers (GTs), in graph learning tasks. Following this trend, we propose a novel approach that empowers off-the-shelf LMs to achieve performance comparable to state-of-the-art GNNs on node classification tasks, without requiring any architectural modification. By preserving the LM's original architecture, our approach retains a key benefit of LM instruction tuning: the ability to jointly train on diverse datasets, fostering greater flexibility and efficiency. To achieve this, we introduce two key augmentation strategies: (1) Enriching LMs' input using topological and semantic retrieval methods, which provide richer contextual information, and (2) guiding the LMs' classification process through a lightweight GNN classifier that effectively prunes class candidates. Our experiments on real-world datasets show that backbone Flan-T5 models equipped with these augmentation strategies outperform state-of-the-art text-output node classifiers and are comparable to top-performing vector-output node classifiers. By bridging the gap between specialized task-specific node classifiers and general LMs, this work paves the way for more versatile and widely applicable graph learning models. We will open-source the code upon publication.
DetectiveQA: Evaluating Long-Context Reasoning on Detective Novels
Sep 04, 2024
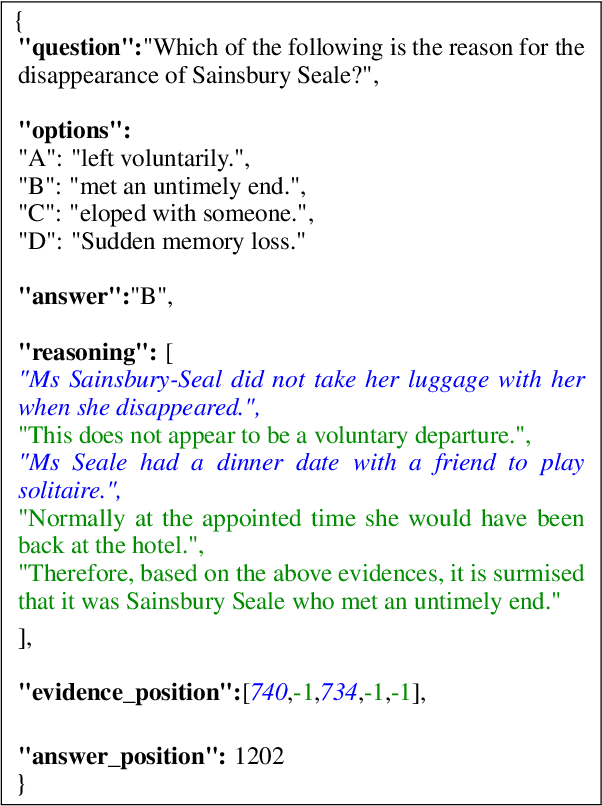


With the rapid advancement of Large Language Models (LLMs), long-context information understanding and processing have become a hot topic in academia and industry. However, benchmarks for evaluating the ability of LLMs to handle long-context information do not seem to have kept pace with the development of LLMs. Despite the emergence of various long-context evaluation benchmarks, the types of capability assessed are still limited, without new capability dimensions. In this paper, we introduce DetectiveQA, a narrative reasoning benchmark featured with an average context length of over 100K tokens. DetectiveQA focuses on evaluating the long-context reasoning ability of LLMs, which not only requires a full understanding of context but also requires extracting important evidences from the context and reasoning according to extracted evidences to answer the given questions. This is a new dimension of capability evaluation, which is more in line with the current intelligence level of LLMs. We use detective novels as data sources, which naturally have various reasoning elements. Finally, we manually annotated 600 questions in Chinese and then also provided an English edition of the context information and questions. We evaluate many long-context LLMs on DetectiveQA, including commercial and open-sourced models, and the results indicate that existing long-context LLMs still require significant advancements to effectively process true long-context dependency questions.
An End-to-End Reinforcement Learning Based Approach for Micro-View Order-Dispatching in Ride-Hailing
Aug 20, 2024



Assigning orders to drivers under localized spatiotemporal context (micro-view order-dispatching) is a major task in Didi, as it influences ride-hailing service experience. Existing industrial solutions mainly follow a two-stage pattern that incorporate heuristic or learning-based algorithms with naive combinatorial methods, tackling the uncertainty of both sides' behaviors, including emerging timings, spatial relationships, and travel duration, etc. In this paper, we propose a one-stage end-to-end reinforcement learning based order-dispatching approach that solves behavior prediction and combinatorial optimization uniformly in a sequential decision-making manner. Specifically, we employ a two-layer Markov Decision Process framework to model this problem, and present \underline{D}eep \underline{D}ouble \underline{S}calable \underline{N}etwork (D2SN), an encoder-decoder structure network to generate order-driver assignments directly and stop assignments accordingly. Besides, by leveraging contextual dynamics, our approach can adapt to the behavioral patterns for better performance. Extensive experiments on Didi's real-world benchmarks justify that the proposed approach significantly outperforms competitive baselines in optimizing matching efficiency and user experience tasks. In addition, we evaluate the deployment outline and discuss the gains and experiences obtained during the deployment tests from the view of large-scale engineering implementation.
MMedAgent: Learning to Use Medical Tools with Multi-modal Agent
Jul 02, 2024



Multi-Modal Large Language Models (MLLMs), despite being successful, exhibit limited generality and often fall short when compared to specialized models. Recently, LLM-based agents have been developed to address these challenges by selecting appropriate specialized models as tools based on user inputs. However, such advancements have not been extensively explored within the medical domain. To bridge this gap, this paper introduces the first agent explicitly designed for the medical field, named \textbf{M}ulti-modal \textbf{Med}ical \textbf{Agent} (MMedAgent). We curate an instruction-tuning dataset comprising six medical tools solving seven tasks, enabling the agent to choose the most suitable tools for a given task. Comprehensive experiments demonstrate that MMedAgent achieves superior performance across a variety of medical tasks compared to state-of-the-art open-source methods and even the closed-source model, GPT-4o. Furthermore, MMedAgent exhibits efficiency in updating and integrating new medical tools.
Technique Report of CVPR 2024 PBDL Challenges
Jun 15, 2024



The intersection of physics-based vision and deep learning presents an exciting frontier for advancing computer vision technologies. By leveraging the principles of physics to inform and enhance deep learning models, we can develop more robust and accurate vision systems. Physics-based vision aims to invert the processes to recover scene properties such as shape, reflectance, light distribution, and medium properties from images. In recent years, deep learning has shown promising improvements for various vision tasks, and when combined with physics-based vision, these approaches can enhance the robustness and accuracy of vision systems. This technical report summarizes the outcomes of the Physics-Based Vision Meets Deep Learning (PBDL) 2024 challenge, held in CVPR 2024 workshop. The challenge consisted of eight tracks, focusing on Low-Light Enhancement and Detection as well as High Dynamic Range (HDR) Imaging. This report details the objectives, methodologies, and results of each track, highlighting the top-performing solutions and their innovative approaches.
Discrete-state Continuous-time Diffusion for Graph Generation
May 19, 2024



Graph is a prevalent discrete data structure, whose generation has wide applications such as drug discovery and circuit design. Diffusion generative models, as an emerging research focus, have been applied to graph generation tasks. Overall, according to the space of states and time steps, diffusion generative models can be categorized into discrete-/continuous-state discrete-/continuous-time fashions. In this paper, we formulate the graph diffusion generation in a discrete-state continuous-time setting, which has never been studied in previous graph diffusion models. The rationale of such a formulation is to preserve the discrete nature of graph-structured data and meanwhile provide flexible sampling trade-offs between sample quality and efficiency. Analysis shows that our training objective is closely related to generation quality, and our proposed generation framework enjoys ideal invariant/equivariant properties concerning the permutation of node ordering. Our proposed model shows competitive empirical performance against state-of-the-art graph generation solutions on various benchmarks and, at the same time, can flexibly trade off the generation quality and efficiency in the sampling phase.
Masked Graph Transformer for Large-Scale Recommendation
May 07, 2024



Graph Transformers have garnered significant attention for learning graph-structured data, thanks to their superb ability to capture long-range dependencies among nodes. However, the quadratic space and time complexity hinders the scalability of Graph Transformers, particularly for large-scale recommendation. Here we propose an efficient Masked Graph Transformer, named MGFormer, capable of capturing all-pair interactions among nodes with a linear complexity. To achieve this, we treat all user/item nodes as independent tokens, enhance them with positional embeddings, and feed them into a kernelized attention module. Additionally, we incorporate learnable relative degree information to appropriately reweigh the attentions. Experimental results show the superior performance of our MGFormer, even with a single attention layer.
Dynamic Demonstration Retrieval and Cognitive Understanding for Emotional Support Conversation
Apr 03, 2024Emotional Support Conversation (ESC) systems are pivotal in providing empathetic interactions, aiding users through negative emotional states by understanding and addressing their unique experiences. In this paper, we tackle two key challenges in ESC: enhancing contextually relevant and empathetic response generation through dynamic demonstration retrieval, and advancing cognitive understanding to grasp implicit mental states comprehensively. We introduce Dynamic Demonstration Retrieval and Cognitive-Aspect Situation Understanding (\ourwork), a novel approach that synergizes these elements to improve the quality of support provided in ESCs. By leveraging in-context learning and persona information, we introduce an innovative retrieval mechanism that selects informative and personalized demonstration pairs. We also propose a cognitive understanding module that utilizes four cognitive relationships from the ATOMIC knowledge source to deepen situational awareness of help-seekers' mental states. Our supportive decoder integrates information from diverse knowledge sources, underpinning response generation that is both empathetic and cognitively aware. The effectiveness of \ourwork is demonstrated through extensive automatic and human evaluations, revealing substantial improvements over numerous state-of-the-art models, with up to 13.79\% enhancement in overall performance of ten metrics. Our codes are available for public access to facilitate further research and development.