 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTTT3R: 3D Reconstruction as Test-Time Training
Sep 30, 2025Modern Recurrent Neural Networks have become a competitive architecture for 3D reconstruction due to their linear-time complexity. However, their performance degrades significantly when applied beyond the training context length, revealing limited length generalization. In this work, we revisit the 3D reconstruction foundation models from a Test-Time Training perspective, framing their designs as an online learning problem. Building on this perspective, we leverage the alignment confidence between the memory state and incoming observations to derive a closed-form learning rate for memory updates, to balance between retaining historical information and adapting to new observations. This training-free intervention, termed TTT3R, substantially improves length generalization, achieving a $2\times$ improvement in global pose estimation over baselines, while operating at 20 FPS with just 6 GB of GPU memory to process thousands of images. Code available in https://rover-xingyu.github.io/TTT3R
Physics-Constrained Diffusion Reconstruction with Posterior Correction for Quantitative and Fast PET Imaging
Aug 20, 2025



Deep learning-based reconstruction of positron emission tomography(PET) data has gained increasing attention in recent years. While these methods achieve fast reconstruction,concerns remain regarding quantitative accuracy and the presence of artifacts,stemming from limited model interpretability,data driven dependence, and overfitting risks.These challenges have hindered clinical adoption.To address them,we propose a conditional diffusion model with posterior physical correction (PET-DPC) for PET image reconstruction. An innovative normalization procedure generates the input Geometric TOF Probabilistic Image (GTP-image),while physical information is incorporated during the diffusion sampling process to perform posterior scatter,attenuation,and random corrections. The model was trained and validated on 300 brain and 50 whole-body PET datasets,a physical phantom,and 20 simulated brain datasets. PET-DPC produced reconstructions closely aligned with fully corrected OSEM images,outperforming end-to-end deep learning models in quantitative metrics and,in some cases, surpassing traditional iterative methods. The model also generalized well to out-of-distribution(OOD) data. Compared to iterative methods,PET-DPC reduced reconstruction time by 50% for brain scans and 85% for whole-body scans. Ablation studies confirmed the critical role of posterior correction in implementing scatter and attenuation corrections,enhancing reconstruction accuracy. Experiments with physical phantoms further demonstrated PET-DPC's ability to preserve background uniformity and accurately reproduce tumor-to-background intensity ratios. Overall,these results highlight PET-DPC as a promising approach for rapid, quantitatively accurate PET reconstruction,with strong potential to improve clinical imaging workflows.
P/D-Device: Disaggregated Large Language Model between Cloud and Devices
Aug 12, 2025Serving disaggregated large language models has been widely adopted in industrial practice for enhanced performance. However, too many tokens generated in decoding phase, i.e., occupying the resources for a long time, essentially hamper the cloud from achieving a higher throughput. Meanwhile, due to limited on-device resources, the time to first token (TTFT), i.e., the latency of prefill phase, increases dramatically with the growth on prompt length. In order to concur with such a bottleneck on resources, i.e., long occupation in cloud and limited on-device computing capacity, we propose to separate large language model between cloud and devices. That is, the cloud helps a portion of the content for each device, only in its prefill phase. Specifically, after receiving the first token from the cloud, decoupling with its own prefill, the device responds to the user immediately for a lower TTFT. Then, the following tokens from cloud are presented via a speed controller for smoothed TPOT (the time per output token), until the device catches up with the progress. On-device prefill is then amortized using received tokens while the resource usage in cloud is controlled. Moreover, during cloud prefill, the prompt can be refined, using those intermediate data already generated, to further speed up on-device inference. We implement such a scheme P/D-Device, and confirm its superiority over other alternatives. We further propose an algorithm to decide the best settings. Real-trace experiments show that TTFT decreases at least 60%, maximum TPOT is about tens of milliseconds, and cloud throughput increases by up to 15x.
Quantum Learning and Estimation for Distribution Networks and Energy Communities Coordination
Jun 13, 2025Price signals from distribution networks (DNs) guide energy communities (ECs) to adjust energy usage, enabling effective coordination for reliable power system operation. However, this coordination faces significant challenges due to the limited availability of information (i.e., only the aggregated energy usage of ECs is available to DNs), and the high computational burden of accounting for uncertainties and the associated risks through numerous scenarios. To address these challenges, we propose a quantum learning and estimation approach to enhance coordination between DNs and ECs. Specifically, leveraging advanced quantum properties such as quantum superposition and entanglement, we develop a hybrid quantum temporal convolutional network-long short-term memory (Q-TCN-LSTM) model to establish an end-to-end mapping between ECs' responses and the price incentives from DNs. Moreover, we develop a quantum estimation method based on quantum amplitude estimation (QAE) and two phase-rotation circuits to significantly accelerate the optimization process under numerous uncertainty scenarios. Numerical experiments demonstrate that, compared to classical neural networks, the proposed Q-TCN-LSTM model improves the mapping accuracy by 69.2% while reducing the model size by 99.75% and the computation time by 93.9%. Compared to classical Monte Carlo simulation, QAE achieves comparable accuracy with a dramatic reduction in computational time (up to 99.99%) and requires significantly fewer computational resources.
On Path to Multimodal Historical Reasoning: HistBench and HistAgent
May 26, 2025Recent advances in large language models (LLMs) have led to remarkable progress across domains, yet their capabilities in the humanities, particularly history, remain underexplored. Historical reasoning poses unique challenges for AI, involving multimodal source interpretation, temporal inference, and cross-linguistic analysis. While general-purpose agents perform well on many existing benchmarks, they lack the domain-specific expertise required to engage with historical materials and questions. To address this gap, we introduce HistBench, a new benchmark of 414 high-quality questions designed to evaluate AI's capacity for historical reasoning and authored by more than 40 expert contributors. The tasks span a wide range of historical problems-from factual retrieval based on primary sources to interpretive analysis of manuscripts and images, to interdisciplinary challenges involving archaeology, linguistics, or cultural history. Furthermore, the benchmark dataset spans 29 ancient and modern languages and covers a wide range of historical periods and world regions. Finding the poor performance of LLMs and other agents on HistBench, we further present HistAgent, a history-specific agent equipped with carefully designed tools for OCR, translation, archival search, and image understanding in History. On HistBench, HistAgent based on GPT-4o achieves an accuracy of 27.54% pass@1 and 36.47% pass@2, significantly outperforming LLMs with online search and generalist agents, including GPT-4o (18.60%), DeepSeek-R1(14.49%) and Open Deep Research-smolagents(20.29% pass@1 and 25.12% pass@2). These results highlight the limitations of existing LLMs and generalist agents and demonstrate the advantages of HistAgent for historical reasoning.
DexGarmentLab: Dexterous Garment Manipulation Environment with Generalizable Policy
May 19, 2025Garment manipulation is a critical challenge due to the diversity in garment categories, geometries, and deformations. Despite this, humans can effortlessly handle garments, thanks to the dexterity of our hands. However, existing research in the field has struggled to replicate this level of dexterity, primarily hindered by the lack of realistic simulations of dexterous garment manipulation. Therefore, we propose DexGarmentLab, the first environment specifically designed for dexterous (especially bimanual) garment manipulation, which features large-scale high-quality 3D assets for 15 task scenarios, and refines simulation techniques tailored for garment modeling to reduce the sim-to-real gap. Previous data collection typically relies on teleoperation or training expert reinforcement learning (RL) policies, which are labor-intensive and inefficient. In this paper, we leverage garment structural correspondence to automatically generate a dataset with diverse trajectories using only a single expert demonstration, significantly reducing manual intervention. However, even extensive demonstrations cannot cover the infinite states of garments, which necessitates the exploration of new algorithms. To improve generalization across diverse garment shapes and deformations, we propose a Hierarchical gArment-manipuLation pOlicy (HALO). It first identifies transferable affordance points to accurately locate the manipulation area, then generates generalizable trajectories to complete the task. Through extensive experiments and detailed analysis of our method and baseline, we demonstrate that HALO consistently outperforms existing methods, successfully generalizing to previously unseen instances even with significant variations in shape and deformation where others fail. Our project page is available at: https://wayrise.github.io/DexGarmentLab/.
Beyond Time: Cross-Dimensional Frequency Supervision for Time Series Forecasting
May 16, 2025



Time series forecasting plays a crucial role in various fields, and the methods based on frequency domain analysis have become an important branch. However, most existing studies focus on the design of elaborate model architectures and are often tailored for limited datasets, still lacking universality. Besides, the assumption of independent and identically distributed (IID) data also contradicts the strong correlation of the time domain labels. To address these issues, abandoning time domain supervision, we propose a purely frequency domain supervision approach named cross-dimensional frequency (X-Freq) loss. Specifically, based on a statistical phenomenon, we first prove that the information entropy of the time series is higher than its spectral entropy, which implies higher certainty in frequency domain and thus can provide better supervision. Secondly, the Fourier Transform and the Wavelet Transform are applied to the time dimension and the channel dimension of the time series respectively, to capture the long-term and short-term frequency variations as well as the spatial configuration features. Thirdly, the loss between predictions and targets is uniformly computed in the frequency domain. Moreover, we plug-and-play incorporate X-Freq into multiple advanced forecasting models and compare on 14 real-world datasets. The experimental results demonstrate that, without making any modification to the original architectures or hyperparameters, X-Freq can improve the forecasting performance by an average of 3.3% on long-term forecasting datasets and 27.7% on short-term ones, showcasing superior generality and practicality. The code will be released publicly.
LiDDA: Data Driven Attribution at LinkedIn
May 14, 2025Data Driven Attribution, which assigns conversion credits to marketing interactions based on causal patterns learned from data, is the foundation of modern marketing intelligence and vital to any marketing businesses and advertising platform. In this paper, we introduce a unified transformer-based attribution approach that can handle member-level data, aggregate-level data, and integration of external macro factors. We detail the large scale implementation of the approach at LinkedIn, showcasing significant impact. We also share learning and insights that are broadly applicable to the marketing and ad tech fields.
Joint Resource Management for Energy-efficient UAV-assisted SWIPT-MEC: A Deep Reinforcement Learning Approach
May 06, 2025The integration of simultaneous wireless information and power transfer (SWIPT) technology in 6G Internet of Things (IoT) networks faces significant challenges in remote areas and disaster scenarios where ground infrastructure is unavailable. This paper proposes a novel unmanned aerial vehicle (UAV)-assisted mobile edge computing (MEC) system enhanced by directional antennas to provide both computational resources and energy support for ground IoT terminals. However, such systems require multiple trade-off policies to balance UAV energy consumption, terminal battery levels, and computational resource allocation under various constraints, including limited UAV battery capacity, non-linear energy harvesting characteristics, and dynamic task arrivals. To address these challenges comprehensively, we formulate a bi-objective optimization problem that simultaneously considers system energy efficiency and terminal battery sustainability. We then reformulate this non-convex problem with a hybrid solution space as a Markov decision process (MDP) and propose an improved soft actor-critic (SAC) algorithm with an action simplification mechanism to enhance its convergence and generalization capabilities. Simulation results have demonstrated that our proposed approach outperforms various baselines in different scenarios, achieving efficient energy management while maintaining high computational performance. Furthermore, our method shows strong generalization ability across different scenarios, particularly in complex environments, validating the effectiveness of our designed boundary penalty and charging reward mechanisms.
SocioVerse: A World Model for Social Simulation Powered by LLM Agents and A Pool of 10 Million Real-World Users
Apr 14, 2025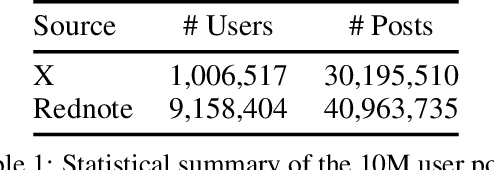
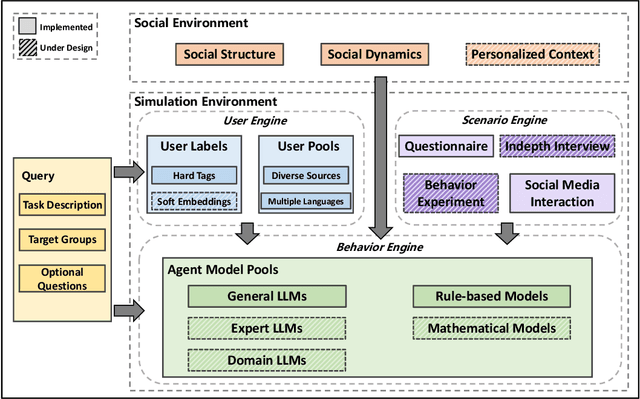

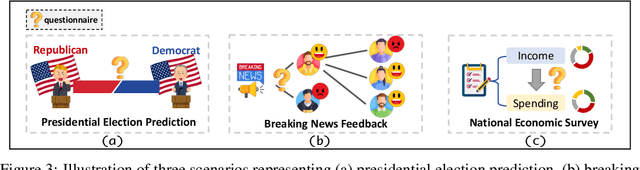
Social simulation is transforming traditional social science research by modeling human behavior through interactions between virtual individuals and their environments. With recent advances in large language models (LLMs), this approach has shown growing potential in capturing individual differences and predicting group behaviors. However, existing methods face alignment challenges related to the environment, target users, interaction mechanisms, and behavioral patterns. To this end, we introduce SocioVerse, an LLM-agent-driven world model for social simulation. Our framework features four powerful alignment components and a user pool of 10 million real individuals. To validate its effectiveness, we conducted large-scale simulation experiments across three distinct domains: politics, news, and economics. Results demonstrate that SocioVerse can reflect large-scale population dynamics while ensuring diversity, credibility, and representativeness through standardized procedures and minimal manual adjustments.