 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultiresolution Deep Implicit Functions for 3D Shape Representation
Sep 16, 2021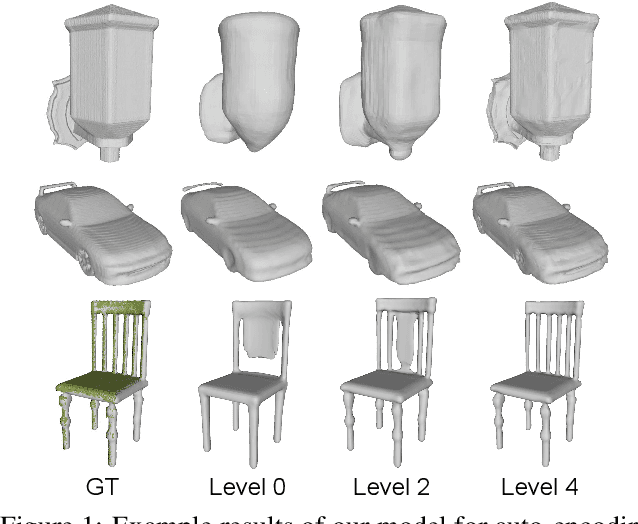
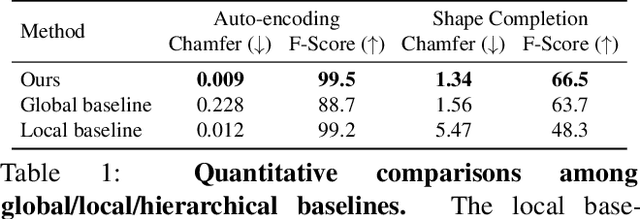
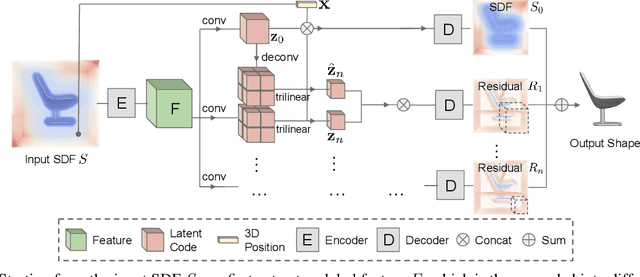
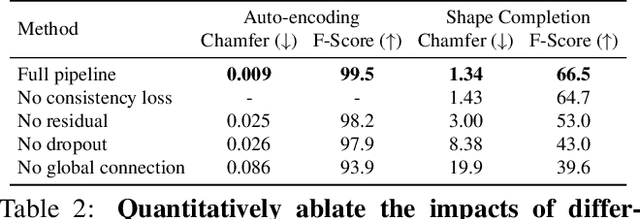
We introduce Multiresolution Deep Implicit Functions (MDIF), a hierarchical representation that can recover fine geometry detail, while being able to perform global operations such as shape completion. Our model represents a complex 3D shape with a hierarchy of latent grids, which can be decoded into different levels of detail and also achieve better accuracy. For shape completion, we propose latent grid dropout to simulate partial data in the latent space and therefore defer the completing functionality to the decoder side. This along with our multires design significantly improves the shape completion quality under decoder-only latent optimization. To the best of our knowledge, MDIF is the first deep implicit function model that can at the same time (1) represent different levels of detail and allow progressive decoding; (2) support both encoder-decoder inference and decoder-only latent optimization, and fulfill multiple applications; (3) perform detailed decoder-only shape completion. Experiments demonstrate its superior performance against prior art in various 3D reconstruction tasks.
Learning Object-Compositional Neural Radiance Field for Editable Scene Rendering
Sep 04, 2021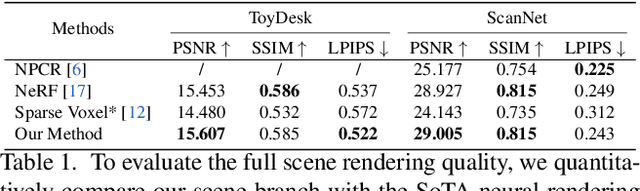
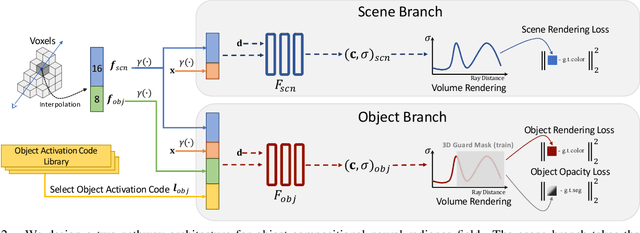
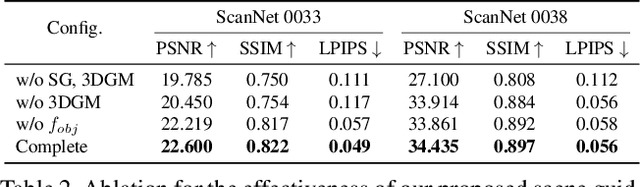
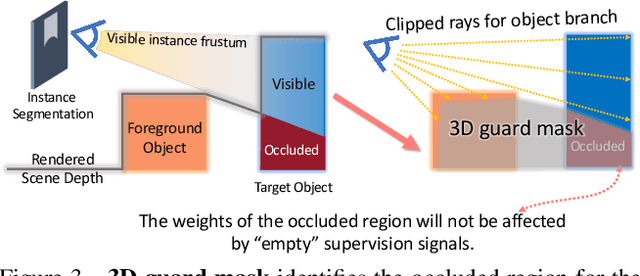
Implicit neural rendering techniques have shown promising results for novel view synthesis. However, existing methods usually encode the entire scene as a whole, which is generally not aware of the object identity and limits the ability to the high-level editing tasks such as moving or adding furniture. In this paper, we present a novel neural scene rendering system, which learns an object-compositional neural radiance field and produces realistic rendering with editing capability for a clustered and real-world scene. Specifically, we design a novel two-pathway architecture, in which the scene branch encodes the scene geometry and appearance, and the object branch encodes each standalone object conditioned on learnable object activation codes. To survive the training in heavily cluttered scenes, we propose a scene-guided training strategy to solve the 3D space ambiguity in the occluded regions and learn sharp boundaries for each object. Extensive experiments demonstrate that our system not only achieves competitive performance for static scene novel-view synthesis, but also produces realistic rendering for object-level editing.
DeepPanoContext: Panoramic 3D Scene Understanding with Holistic Scene Context Graph and Relation-based Optimization
Aug 24, 2021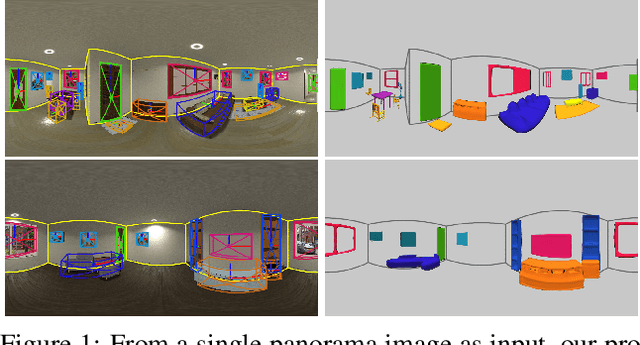

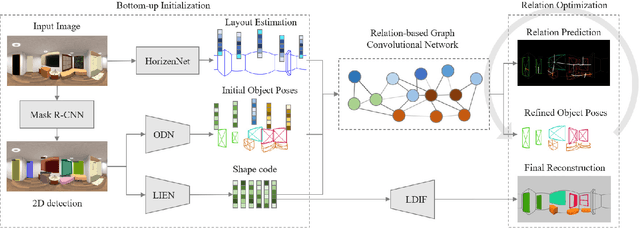

Panorama images have a much larger field-of-view thus naturally encode enriched scene context information compared to standard perspective images, which however is not well exploited in the previous scene understanding methods. In this paper, we propose a novel method for panoramic 3D scene understanding which recovers the 3D room layout and the shape, pose, position, and semantic category for each object from a single full-view panorama image. In order to fully utilize the rich context information, we design a novel graph neural network based context model to predict the relationship among objects and room layout, and a differentiable relationship-based optimization module to optimize object arrangement with well-designed objective functions on-the-fly. Realizing the existing data are either with incomplete ground truth or overly-simplified scene, we present a new synthetic dataset with good diversity in room layout and furniture placement, and realistic image quality for total panoramic 3D scene understanding. Experiments demonstrate that our method outperforms existing methods on panoramic scene understanding in terms of both geometry accuracy and object arrangement. Code is available at https://chengzhag.github.io/publication/dpc.
Deep Hybrid Self-Prior for Full 3D Mesh Generation
Aug 24, 2021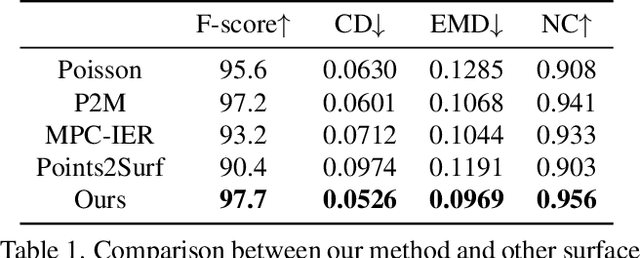
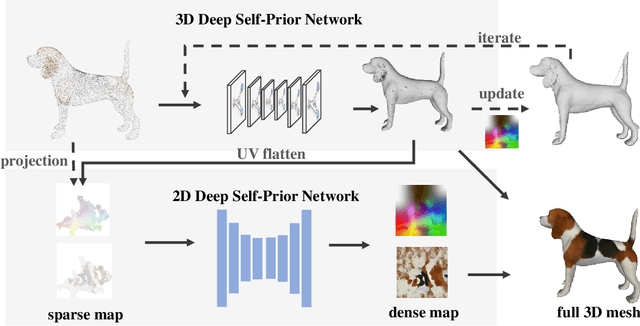
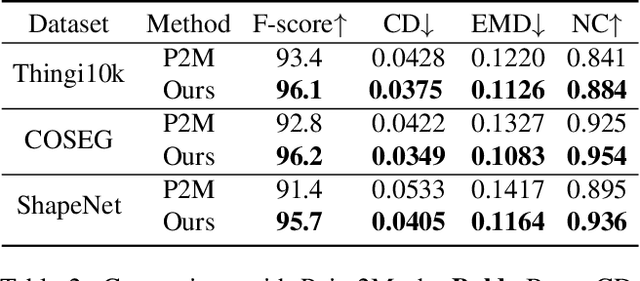
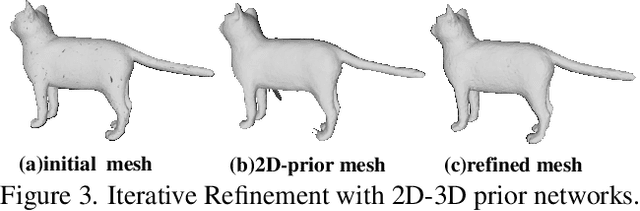
We present a deep learning pipeline that leverages network self-prior to recover a full 3D model consisting of both a triangular mesh and a texture map from the colored 3D point cloud. Different from previous methods either exploiting 2D self-prior for image editing or 3D self-prior for pure surface reconstruction, we propose to exploit a novel hybrid 2D-3D self-prior in deep neural networks to significantly improve the geometry quality and produce a high-resolution texture map, which is typically missing from the output of commodity-level 3D scanners. In particular, we first generate an initial mesh using a 3D convolutional neural network with 3D self-prior, and then encode both 3D information and color information in the 2D UV atlas, which is further refined by 2D convolutional neural networks with the self-prior. In this way, both 2D and 3D self-priors are utilized for the mesh and texture recovery. Experiments show that, without the need of any additional training data, our method recovers the 3D textured mesh model of high quality from sparse input, and outperforms the state-of-the-art methods in terms of both the geometry and texture quality.
Spatially-Varying Outdoor Lighting Estimation from Intrinsics
Apr 28, 2021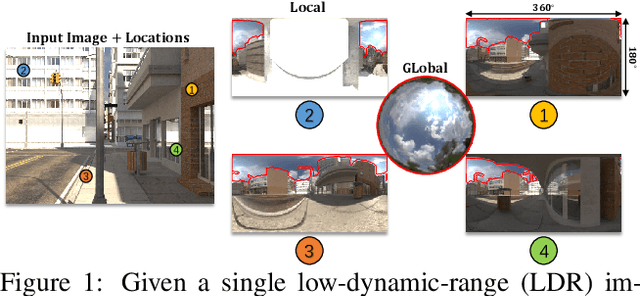
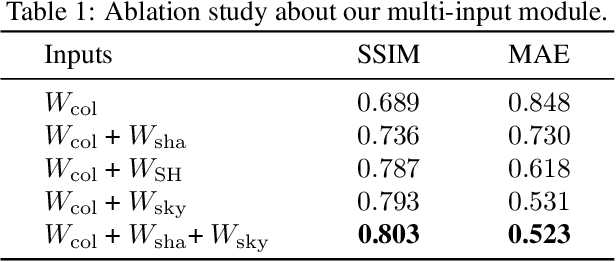
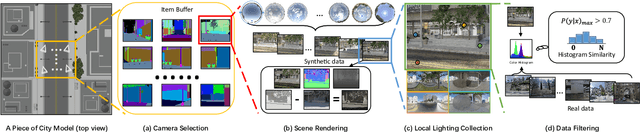
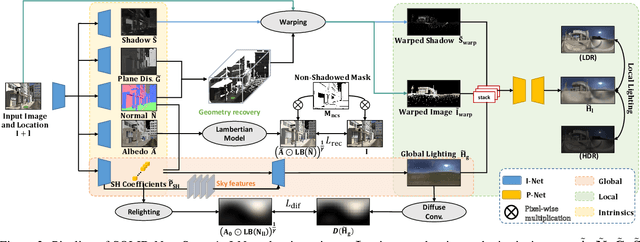
We present SOLID-Net, a neural network for spatially-varying outdoor lighting estimation from a single outdoor image for any 2D pixel location. Previous work has used a unified sky environment map to represent outdoor lighting. Instead, we generate spatially-varying local lighting environment maps by combining global sky environment map with warped image information according to geometric information estimated from intrinsics. As no outdoor dataset with image and local lighting ground truth is readily available, we introduce the SOLID-Img dataset with physically-based rendered images and their corresponding intrinsic and lighting information. We train a deep neural network to regress intrinsic cues with physically-based constraints and use them to conduct global and local lightings estimation. Experiments on both synthetic and real datasets show that SOLID-Net significantly outperforms previous methods.
HumanGPS: Geodesic PreServing Feature for Dense Human Correspondences
Mar 29, 2021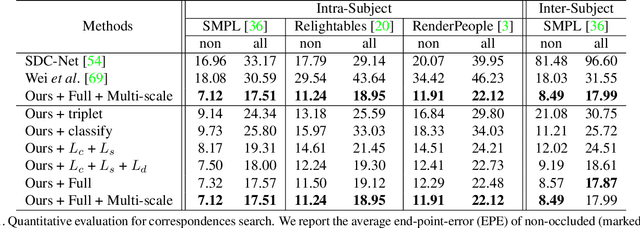
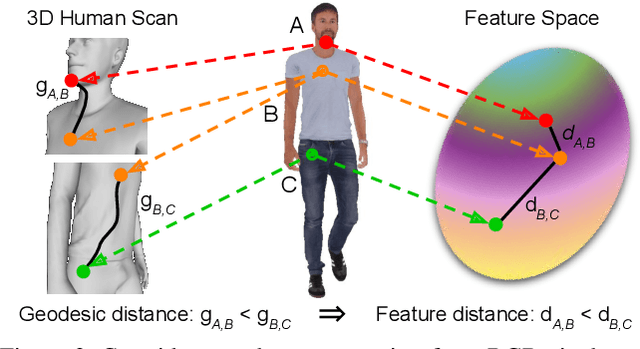
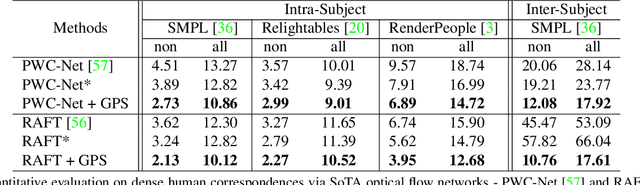
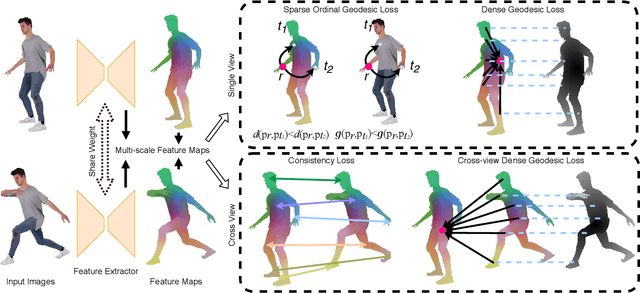
In this paper, we address the problem of building dense correspondences between human images under arbitrary camera viewpoints and body poses. Prior art either assumes small motion between frames or relies on local descriptors, which cannot handle large motion or visually ambiguous body parts, e.g., left vs. right hand. In contrast, we propose a deep learning framework that maps each pixel to a feature space, where the feature distances reflect the geodesic distances among pixels as if they were projected onto the surface of a 3D human scan. To this end, we introduce novel loss functions to push features apart according to their geodesic distances on the surface. Without any semantic annotation, the proposed embeddings automatically learn to differentiate visually similar parts and align different subjects into an unified feature space. Extensive experiments show that the learned embeddings can produce accurate correspondences between images with remarkable generalization capabilities on both intra and inter subjects.
Learning Compositional Representation for 4D Captures with Neural ODE
Mar 15, 2021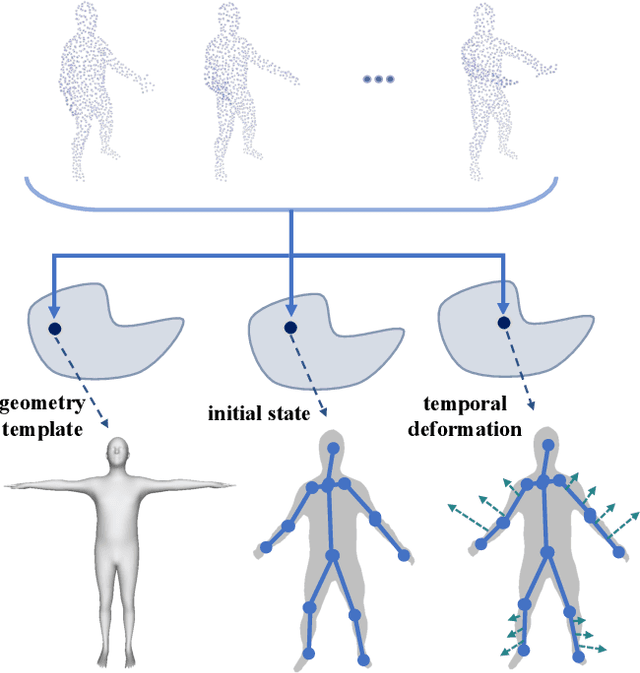
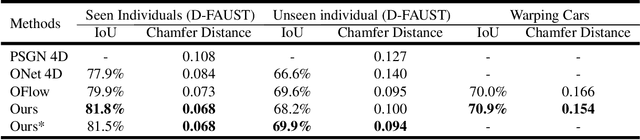
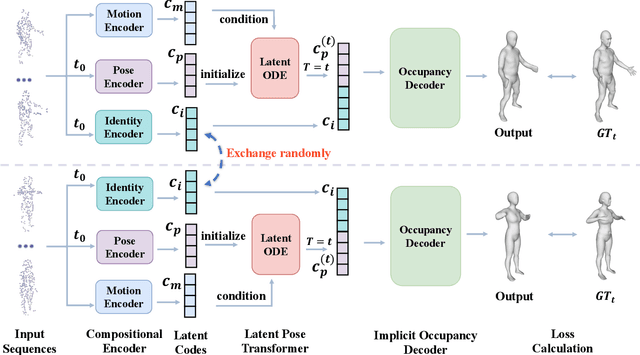
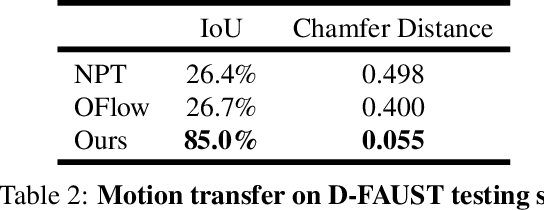
Learning based representation has become the key to the success of many computer vision systems. While many 3D representations have been proposed, it is still an unaddressed problem for how to represent a dynamically changing 3D object. In this paper, we introduce a compositional representation for 4D captures, i.e. a deforming 3D object over a temporal span, that disentangles shape, initial state, and motion respectively. Each component is represented by a latent code via a trained encoder. To model the motion, a neural Ordinary Differential Equation (ODE) is trained to update the initial state conditioned on the learned motion code, and a decoder takes the shape code and the updated pose code to reconstruct 4D captures at each time stamp. To this end, we propose an Identity Exchange Training (IET) strategy to encourage the network to learn effectively decoupling each component. Extensive experiments demonstrate that the proposed method outperforms existing state-of-the-art deep learning based methods on 4D reconstruction, and significantly improves on various tasks, including motion transfer and completion.
Holistic 3D Scene Understanding from a Single Image with Implicit Representation
Mar 11, 2021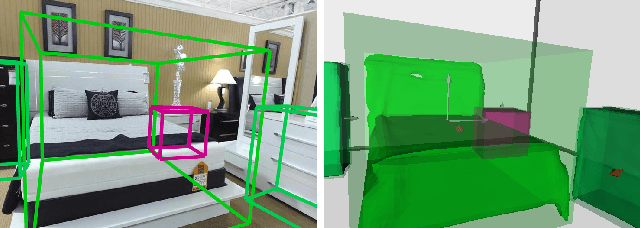

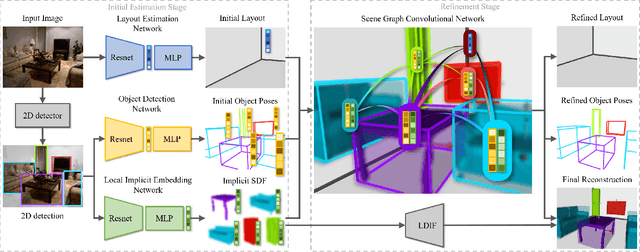

We present a new pipeline for holistic 3D scene understanding from a single image, which could predict object shape, object pose, and scene layout. As it is a highly ill-posed problem, existing methods usually suffer from inaccurate estimation of both shapes and layout especially for the cluttered scene due to the heavy occlusion between objects. We propose to utilize the latest deep implicit representation to solve this challenge. We not only propose an image-based local structured implicit network to improve the object shape estimation, but also refine 3D object pose and scene layout via a novel implicit scene graph neural network that exploits the implicit local object features. A novel physical violation loss is also proposed to avoid incorrect context between objects. Extensive experiments demonstrate that our method outperforms the state-of-the-art methods in terms of object shape, scene layout estimation, and 3D object detection.
GeoLayout: Geometry Driven Room Layout Estimation Based on Depth Maps of Planes
Aug 14, 2020The task of room layout estimation is to locate the wall-floor, wall-ceiling, and wall-wall boundaries. Most recent methods solve this problem based on edge/keypoint detection or semantic segmentation. However, these approaches have shown limited attention on the geometry of the dominant planes and the intersection between them, which has significant impact on room layout. In this work, we propose to incorporate geometric reasoning to deep learning for layout estimation. Our approach learns to infer the depth maps of the dominant planes in the scene by predicting the pixel-level surface parameters, and the layout can be generated by the intersection of the depth maps. Moreover, we present a new dataset with pixel-level depth annotation of dominant planes. It is larger than the existing datasets and contains both cuboid and non-cuboid rooms. Experimental results show that our approach produces considerable performance gains on both 2D and 3D datasets.
HITNet: Hierarchical Iterative Tile Refinement Network for Real-time Stereo Matching
Jul 23, 2020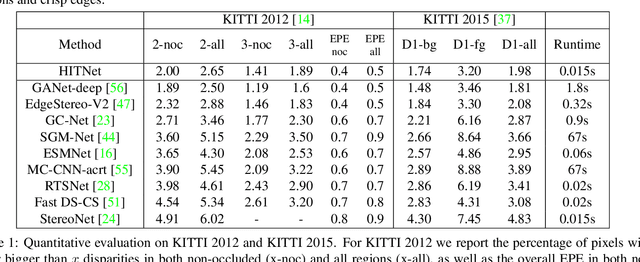
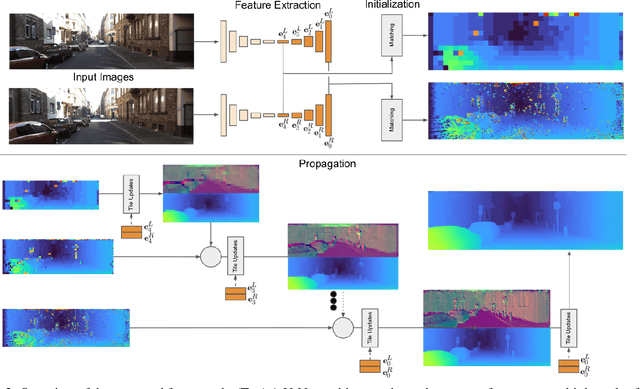

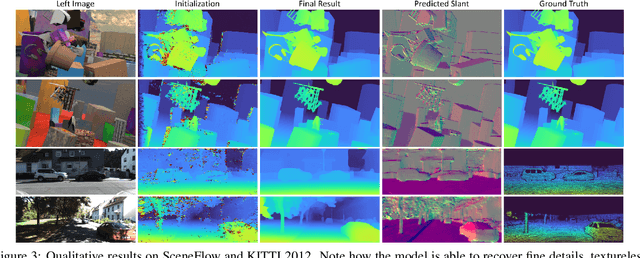
This paper presents HITNet, a novel neural network architecture for real-time stereo matching. Contrary to many recent neural network approaches that operate on a full cost volume and rely on 3D convolutions, our approach does not explicitly build a volume and instead relies on a fast multi-resolution initialization step, differentiable 2D geometric propagation and warping mechanisms to infer disparity hypotheses. To achieve a high level of accuracy, our network not only geometrically reasons about disparities but also infers slanted plane hypotheses allowing to more accurately perform geometric warping and upsampling operations. Our architecture is inherently multi-resolution allowing the propagation of information at different levels. Multiple experiments prove the effectiveness of the proposed approach at a fraction of the computation required by recent state-of-the-art methods. At time of writing, HITNet ranks 1st-3rd on all the metrics published on the ETH3D website for two view stereo and ranks 1st on the popular KITTI 2012 and 2015 benchmarks among the published methods faster than 100ms.