 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDon't Start From Scratch: Leveraging Prior Data to Automate Robotic Reinforcement Learning
Jul 17, 2022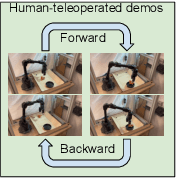
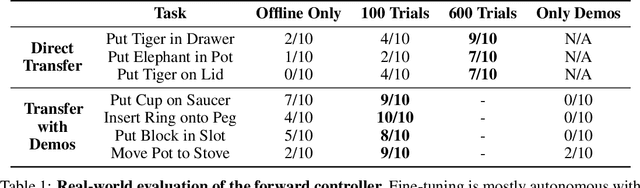
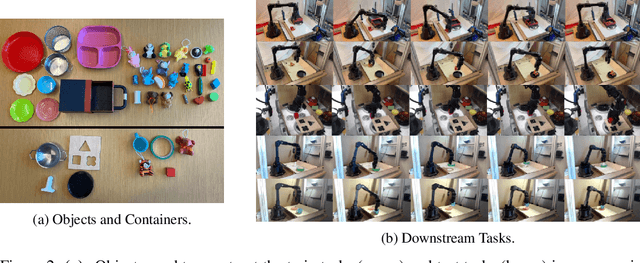
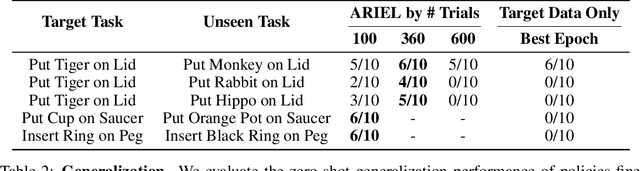
Reinforcement learning (RL) algorithms hold the promise of enabling autonomous skill acquisition for robotic systems. However, in practice, real-world robotic RL typically requires time consuming data collection and frequent human intervention to reset the environment. Moreover, robotic policies learned with RL often fail when deployed beyond the carefully controlled setting in which they were learned. In this work, we study how these challenges can all be tackled by effective utilization of diverse offline datasets collected from previously seen tasks. When faced with a new task, our system adapts previously learned skills to quickly learn to both perform the new task and return the environment to an initial state, effectively performing its own environment reset. Our empirical results demonstrate that incorporating prior data into robotic reinforcement learning enables autonomous learning, substantially improves sample-efficiency of learning, and enables better generalization. Project website: https://sites.google.com/view/ariel-berkeley/
Inner Monologue: Embodied Reasoning through Planning with Language Models
Jul 12, 2022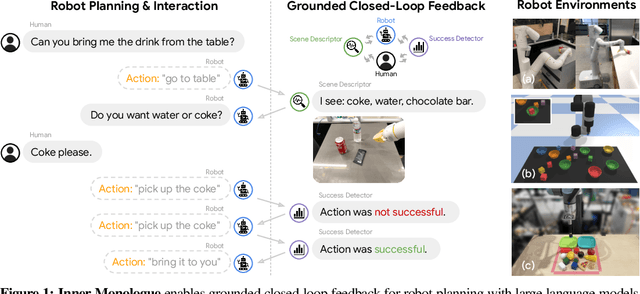
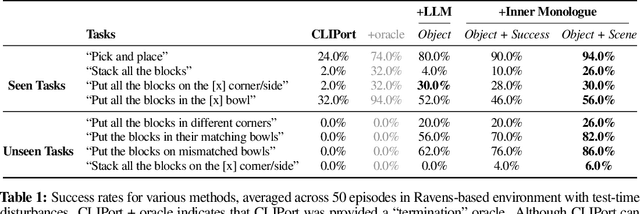
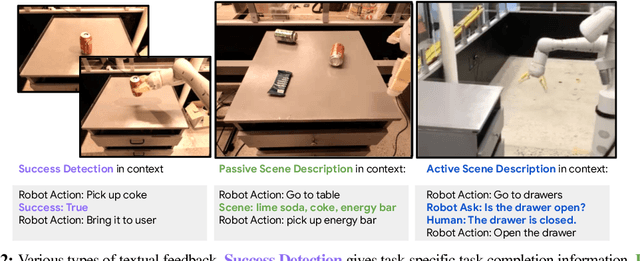
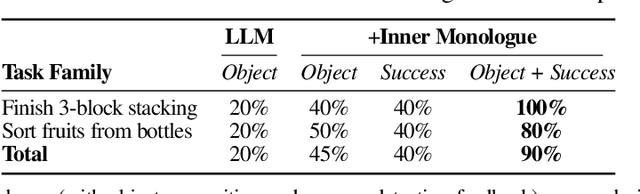
Recent works have shown how the reasoning capabilities of Large Language Models (LLMs) can be applied to domains beyond natural language processing, such as planning and interaction for robots. These embodied problems require an agent to understand many semantic aspects of the world: the repertoire of skills available, how these skills influence the world, and how changes to the world map back to the language. LLMs planning in embodied environments need to consider not just what skills to do, but also how and when to do them - answers that change over time in response to the agent's own choices. In this work, we investigate to what extent LLMs used in such embodied contexts can reason over sources of feedback provided through natural language, without any additional training. We propose that by leveraging environment feedback, LLMs are able to form an inner monologue that allows them to more richly process and plan in robotic control scenarios. We investigate a variety of sources of feedback, such as success detection, scene description, and human interaction. We find that closed-loop language feedback significantly improves high-level instruction completion on three domains, including simulated and real table top rearrangement tasks and long-horizon mobile manipulation tasks in a kitchen environment in the real world.
LM-Nav: Robotic Navigation with Large Pre-Trained Models of Language, Vision, and Action
Jul 10, 2022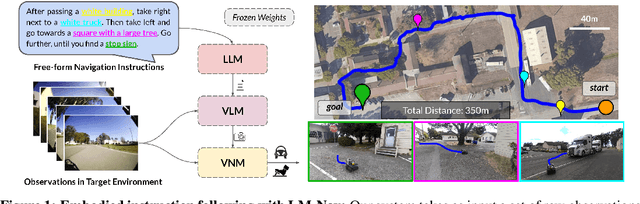

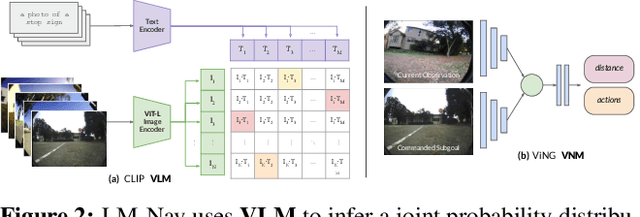
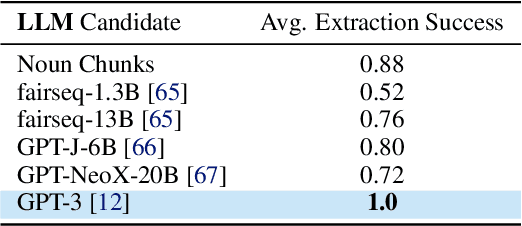
Goal-conditioned policies for robotic navigation can be trained on large, unannotated datasets, providing for good generalization to real-world settings. However, particularly in vision-based settings where specifying goals requires an image, this makes for an unnatural interface. Language provides a more convenient modality for communication with robots, but contemporary methods typically require expensive supervision, in the form of trajectories annotated with language descriptions. We present a system, LM-Nav, for robotic navigation that enjoys the benefits of training on unannotated large datasets of trajectories, while still providing a high-level interface to the user. Instead of utilizing a labeled instruction following dataset, we show that such a system can be constructed entirely out of pre-trained models for navigation (ViNG), image-language association (CLIP), and language modeling (GPT-3), without requiring any fine-tuning or language-annotated robot data. We instantiate LM-Nav on a real-world mobile robot and demonstrate long-horizon navigation through complex, outdoor environments from natural language instructions. For videos of our experiments, code release, and an interactive Colab notebook that runs in your browser, please check out our project page https://sites.google.com/view/lmnav
Offline RL Policies Should be Trained to be Adaptive
Jul 05, 2022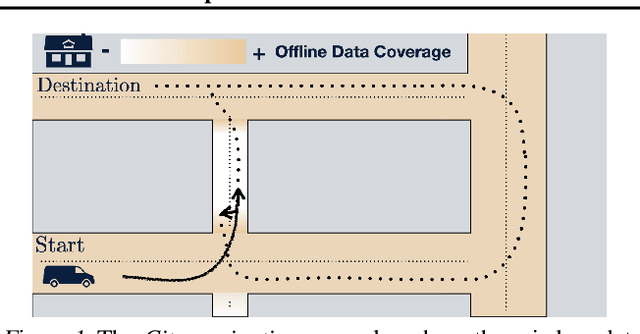
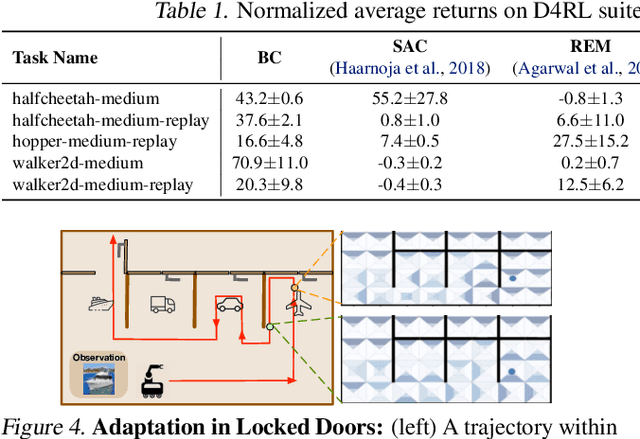
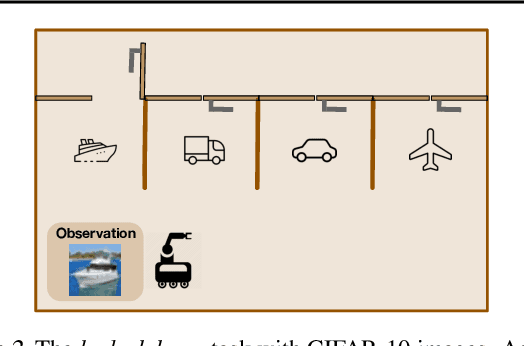
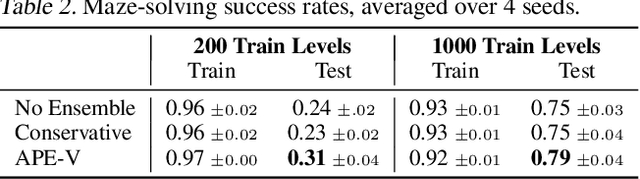
Offline RL algorithms must account for the fact that the dataset they are provided may leave many facets of the environment unknown. The most common way to approach this challenge is to employ pessimistic or conservative methods, which avoid behaviors that are too dissimilar from those in the training dataset. However, relying exclusively on conservatism has drawbacks: performance is sensitive to the exact degree of conservatism, and conservative objectives can recover highly suboptimal policies. In this work, we propose that offline RL methods should instead be adaptive in the presence of uncertainty. We show that acting optimally in offline RL in a Bayesian sense involves solving an implicit POMDP. As a result, optimal policies for offline RL must be adaptive, depending not just on the current state but rather all the transitions seen so far during evaluation.We present a model-free algorithm for approximating this optimal adaptive policy, and demonstrate the efficacy of learning such adaptive policies in offline RL benchmarks.
Object Representations as Fixed Points: Training Iterative Refinement Algorithms with Implicit Differentiation
Jul 02, 2022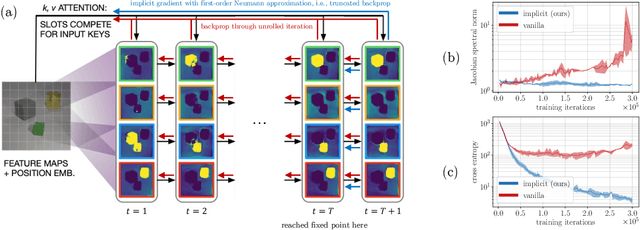

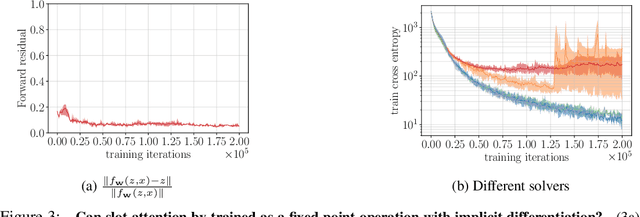

Iterative refinement -- start with a random guess, then iteratively improve the guess -- is a useful paradigm for representation learning because it offers a way to break symmetries among equally plausible explanations for the data. This property enables the application of such methods to infer representations of sets of entities, such as objects in physical scenes, structurally resembling clustering algorithms in latent space. However, most prior works differentiate through the unrolled refinement process, which can make optimization challenging. We observe that such methods can be made differentiable by means of the implicit function theorem, and develop an implicit differentiation approach that improves the stability and tractability of training by decoupling the forward and backward passes. This connection enables us to apply advances in optimizing implicit layers to not only improve the optimization of the slot attention module in SLATE, a state-of-the-art method for learning entity representations, but do so with constant space and time complexity in backpropagation and only one additional line of code.
Lyapunov Density Models: Constraining Distribution Shift in Learning-Based Control
Jun 21, 2022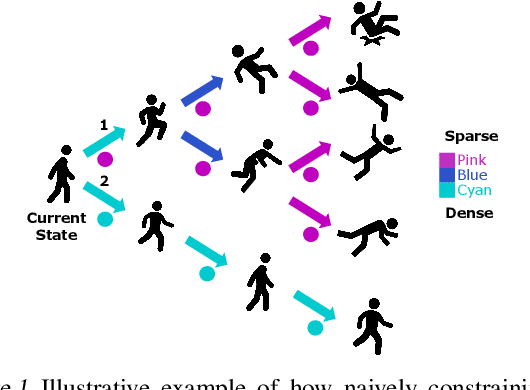
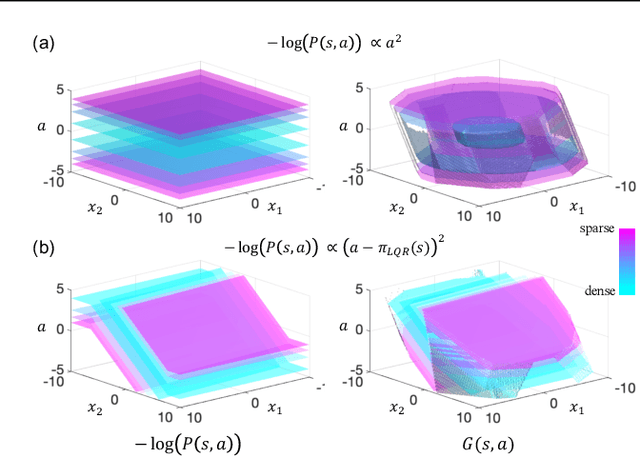
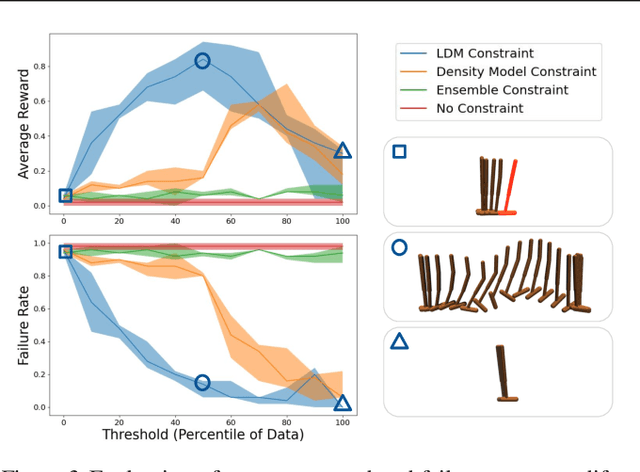
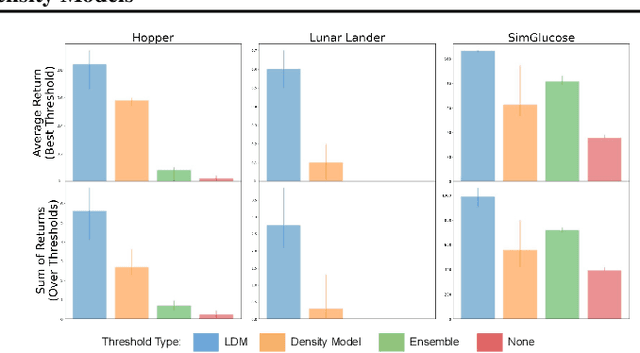
Learned models and policies can generalize effectively when evaluated within the distribution of the training data, but can produce unpredictable and erroneous outputs on out-of-distribution inputs. In order to avoid distribution shift when deploying learning-based control algorithms, we seek a mechanism to constrain the agent to states and actions that resemble those that it was trained on. In control theory, Lyapunov stability and control-invariant sets allow us to make guarantees about controllers that stabilize the system around specific states, while in machine learning, density models allow us to estimate the training data distribution. Can we combine these two concepts, producing learning-based control algorithms that constrain the system to in-distribution states using only in-distribution actions? In this work, we propose to do this by combining concepts from Lyapunov stability and density estimation, introducing Lyapunov density models: a generalization of control Lyapunov functions and density models that provides guarantees on an agent's ability to stay in-distribution over its entire trajectory.
Contrastive Learning as Goal-Conditioned Reinforcement Learning
Jun 15, 2022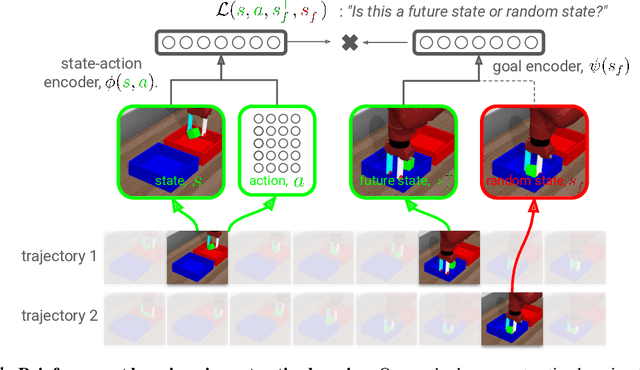
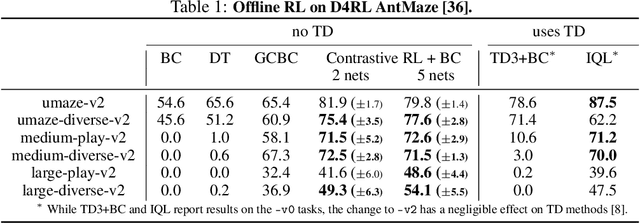
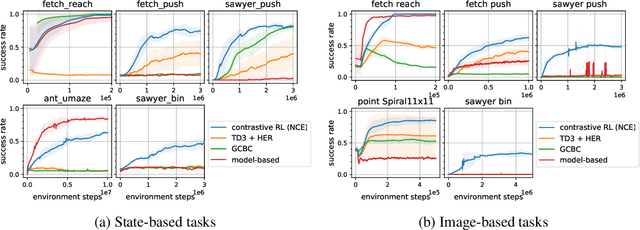
In reinforcement learning (RL), it is easier to solve a task if given a good representation. While deep RL should automatically acquire such good representations, prior work often finds that learning representations in an end-to-end fashion is unstable and instead equip RL algorithms with additional representation learning parts (e.g., auxiliary losses, data augmentation). How can we design RL algorithms that directly acquire good representations? In this paper, instead of adding representation learning parts to an existing RL algorithm, we show (contrastive) representation learning methods can be cast as RL algorithms in their own right. To do this, we build upon prior work and apply contrastive representation learning to action-labeled trajectories, in such a way that the (inner product of) learned representations exactly corresponds to a goal-conditioned value function. We use this idea to reinterpret a prior RL method as performing contrastive learning, and then use the idea to propose a much simpler method that achieves similar performance. Across a range of goal-conditioned RL tasks, we demonstrate that contrastive RL methods achieve higher success rates than prior non-contrastive methods, including in the offline RL setting. We also show that contrastive RL outperforms prior methods on image-based tasks, without using data augmentation or auxiliary objectives.
Imitating Past Successes can be Very Suboptimal
Jun 07, 2022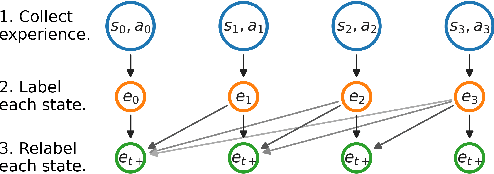
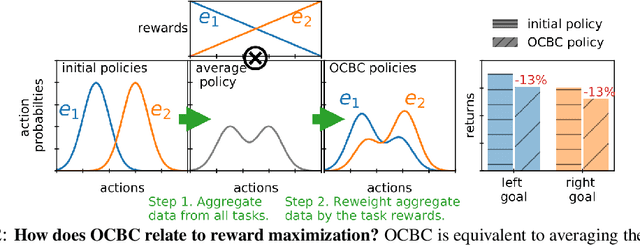
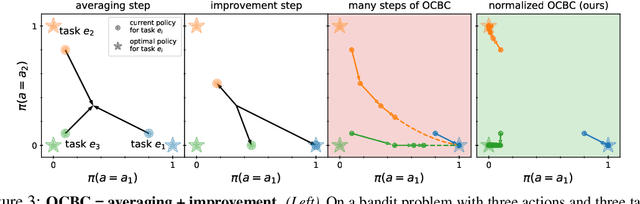
Prior work has proposed a simple strategy for reinforcement learning (RL): label experience with the outcomes achieved in that experience, and then imitate the relabeled experience. These outcome-conditioned imitation learning methods are appealing because of their simplicity, strong performance, and close ties with supervised learning. However, it remains unclear how these methods relate to the standard RL objective, reward maximization. In this paper, we prove that existing outcome-conditioned imitation learning methods do not necessarily improve the policy; rather, in some settings they can decrease the expected reward. Nonetheless, we show that a simple modification results in a method that does guarantee policy improvement, under some assumptions. Our aim is not to develop an entirely new method, but rather to explain how a variant of outcome-conditioned imitation learning can be used to maximize rewards.
Adversarial Unlearning: Reducing Confidence Along Adversarial Directions
Jun 03, 2022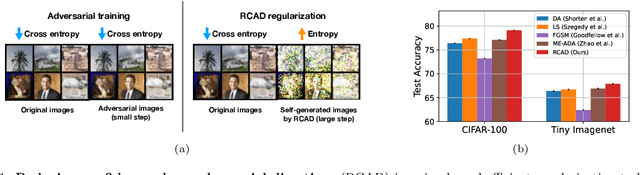
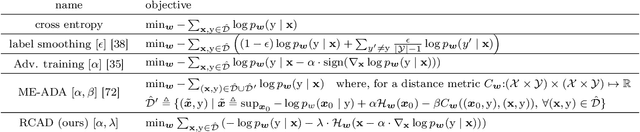
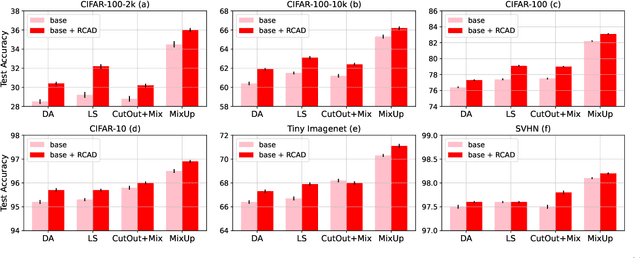
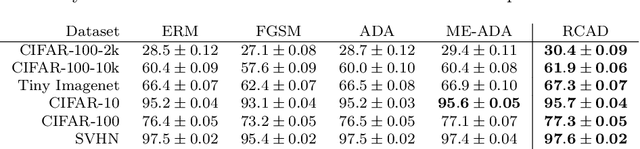
Supervised learning methods trained with maximum likelihood objectives often overfit on training data. Most regularizers that prevent overfitting look to increase confidence on additional examples (e.g., data augmentation, adversarial training), or reduce it on training data (e.g., label smoothing). In this work we propose a complementary regularization strategy that reduces confidence on self-generated examples. The method, which we call RCAD (Reducing Confidence along Adversarial Directions), aims to reduce confidence on out-of-distribution examples lying along directions adversarially chosen to increase training loss. In contrast to adversarial training, RCAD does not try to robustify the model to output the original label, but rather regularizes it to have reduced confidence on points generated using much larger perturbations than in conventional adversarial training. RCAD can be easily integrated into training pipelines with a few lines of code. Despite its simplicity, we find on many classification benchmarks that RCAD can be added to existing techniques (e.g., label smoothing, MixUp training) to increase test accuracy by 1-3% in absolute value, with more significant gains in the low data regime. We also provide a theoretical analysis that helps to explain these benefits in simplified settings, showing that RCAD can provably help the model unlearn spurious features in the training data.
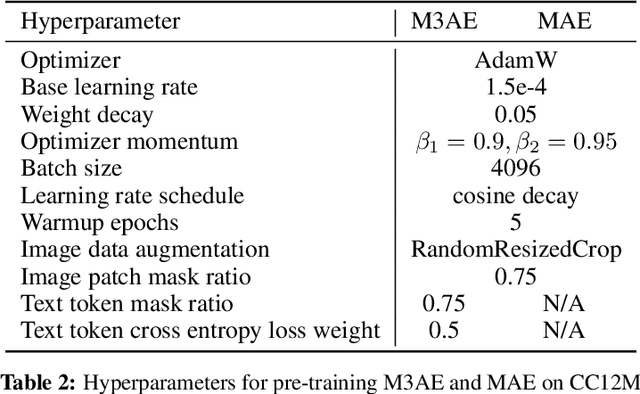
Multimodal Masked Autoencoders Learn Transferable Representations
May 31, 2022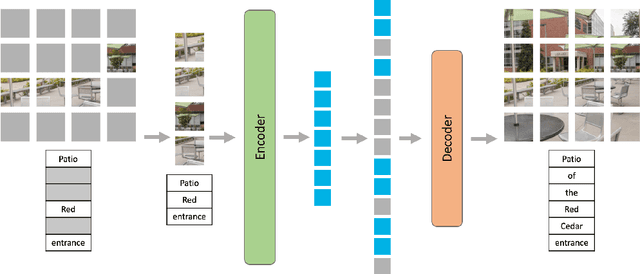
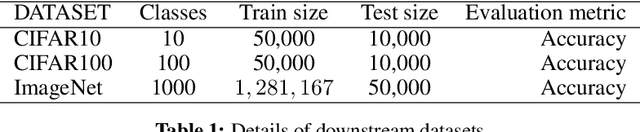
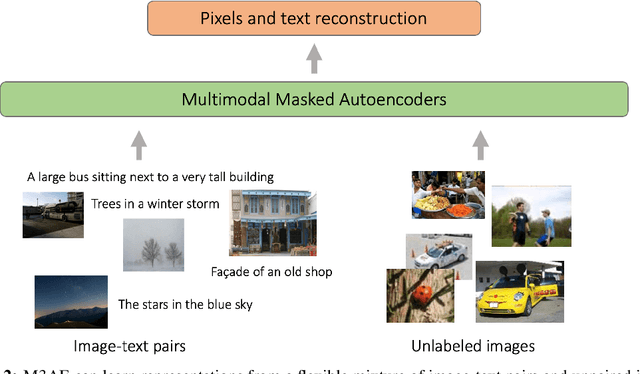
Building scalable models to learn from diverse, multimodal data remains an open challenge. For vision-language data, the dominant approaches are based on contrastive learning objectives that train a separate encoder for each modality. While effective, contrastive learning approaches introduce sampling bias depending on the data augmentations used, which can degrade performance on downstream tasks. Moreover, these methods are limited to paired image-text data, and cannot leverage widely-available unpaired data. In this paper, we investigate whether a large multimodal model trained purely via masked token prediction, without using modality-specific encoders or contrastive learning, can learn transferable representations for downstream tasks. We propose a simple and scalable network architecture, the Multimodal Masked Autoencoder (M3AE), which learns a unified encoder for both vision and language data via masked token prediction. We provide an empirical study of M3AE trained on a large-scale image-text dataset, and find that M3AE is able to learn generalizable representations that transfer well to downstream tasks. Surprisingly, we find that M3AE benefits from a higher text mask ratio (50-90%), in contrast to BERT whose standard masking ratio is 15%, due to the joint training of two data modalities. We also provide qualitative analysis showing that the learned representation incorporates meaningful information from both image and language. Lastly, we demonstrate the scalability of M3AE with larger model size and training time, and its flexibility to train on both paired image-text data as well as unpaired data.