 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeREBOOT: Reuse Data for Bootstrapping Efficient Real-World Dexterous Manipulation
Sep 06, 2023Dexterous manipulation tasks involving contact-rich interactions pose a significant challenge for both model-based control systems and imitation learning algorithms. The complexity arises from the need for multi-fingered robotic hands to dynamically establish and break contacts, balance non-prehensile forces, and control large degrees of freedom. Reinforcement learning (RL) offers a promising approach due to its general applicability and capacity to autonomously acquire optimal manipulation strategies. However, its real-world application is often hindered by the necessity to generate a large number of samples, reset the environment, and obtain reward signals. In this work, we introduce an efficient system for learning dexterous manipulation skills with RL to alleviate these challenges. The main idea of our approach is the integration of recent advances in sample-efficient RL and replay buffer bootstrapping. This combination allows us to utilize data from different tasks or objects as a starting point for training new tasks, significantly improving learning efficiency. Additionally, our system completes the real-world training cycle by incorporating learned resets via an imitation-based pickup policy as well as learned reward functions, eliminating the need for manual resets and reward engineering. We demonstrate the benefits of reusing past data as replay buffer initialization for new tasks, for instance, the fast acquisition of intricate manipulation skills in the real world on a four-fingered robotic hand. (Videos: https://sites.google.com/view/reboot-dexterous)
Dexterous Manipulation from Images: Autonomous Real-World RL via Substep Guidance
Dec 19, 2022



Complex and contact-rich robotic manipulation tasks, particularly those that involve multi-fingered hands and underactuated object manipulation, present a significant challenge to any control method. Methods based on reinforcement learning offer an appealing choice for such settings, as they can enable robots to learn to delicately balance contact forces and dexterously reposition objects without strong modeling assumptions. However, running reinforcement learning on real-world dexterous manipulation systems often requires significant manual engineering. This negates the benefits of autonomous data collection and ease of use that reinforcement learning should in principle provide. In this paper, we describe a system for vision-based dexterous manipulation that provides a "programming-free" approach for users to define new tasks and enable robots with complex multi-fingered hands to learn to perform them through interaction. The core principle underlying our system is that, in a vision-based setting, users should be able to provide high-level intermediate supervision that circumvents challenges in teleoperation or kinesthetic teaching which allow a robot to not only learn a task efficiently but also to autonomously practice. Our system includes a framework for users to define a final task and intermediate sub-tasks with image examples, a reinforcement learning procedure that learns the task autonomously without interventions, and experimental results with a four-finger robotic hand learning multi-stage object manipulation tasks directly in the real world, without simulation, manual modeling, or reward engineering.
Reset-Free Reinforcement Learning via Multi-Task Learning: Learning Dexterous Manipulation Behaviors without Human Intervention
Apr 22, 2021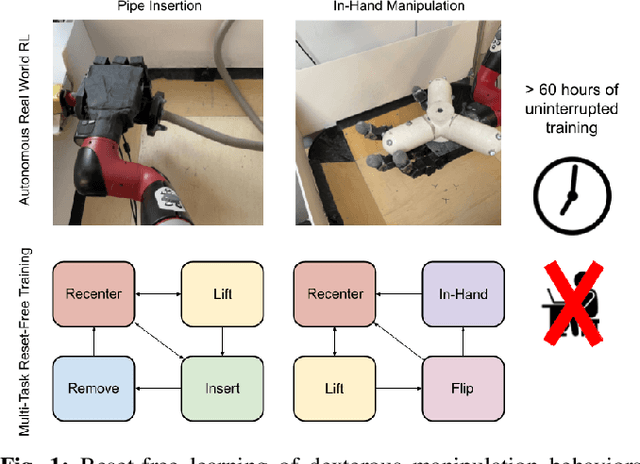



Reinforcement Learning (RL) algorithms can in principle acquire complex robotic skills by learning from large amounts of data in the real world, collected via trial and error. However, most RL algorithms use a carefully engineered setup in order to collect data, requiring human supervision and intervention to provide episodic resets. This is particularly evident in challenging robotics problems, such as dexterous manipulation. To make data collection scalable, such applications require reset-free algorithms that are able to learn autonomously, without explicit instrumentation or human intervention. Most prior work in this area handles single-task learning. However, we might also want robots that can perform large repertoires of skills. At first, this would appear to only make the problem harder. However, the key observation we make in this work is that an appropriately chosen multi-task RL setting actually alleviates the reset-free learning challenge, with minimal additional machinery required. In effect, solving a multi-task problem can directly solve the reset-free problem since different combinations of tasks can serve to perform resets for other tasks. By learning multiple tasks together and appropriately sequencing them, we can effectively learn all of the tasks together reset-free. This type of multi-task learning can effectively scale reset-free learning schemes to much more complex problems, as we demonstrate in our experiments. We propose a simple scheme for multi-task learning that tackles the reset-free learning problem, and show its effectiveness at learning to solve complex dexterous manipulation tasks in both hardware and simulation without any explicit resets. This work shows the ability to learn dexterous manipulation behaviors in the real world with RL without any human intervention.