 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Processes
Jul 04, 2018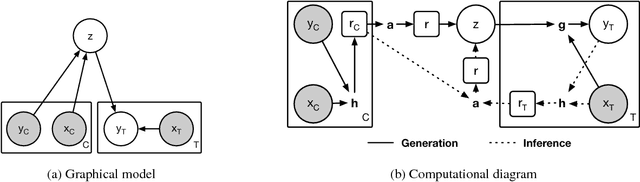

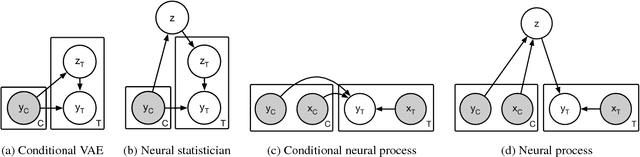
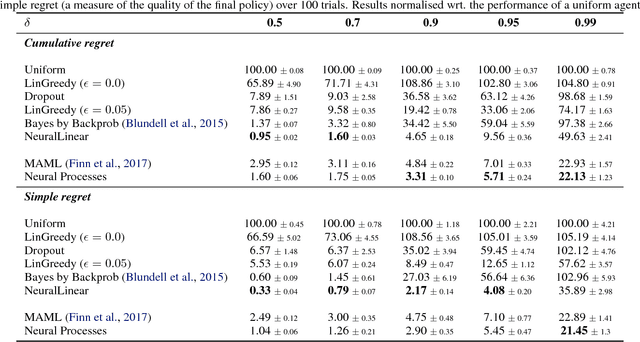
A neural network (NN) is a parameterised function that can be tuned via gradient descent to approximate a labelled collection of data with high precision. A Gaussian process (GP), on the other hand, is a probabilistic model that defines a distribution over possible functions, and is updated in light of data via the rules of probabilistic inference. GPs are probabilistic, data-efficient and flexible, however they are also computationally intensive and thus limited in their applicability. We introduce a class of neural latent variable models which we call Neural Processes (NPs), combining the best of both worlds. Like GPs, NPs define distributions over functions, are capable of rapid adaptation to new observations, and can estimate the uncertainty in their predictions. Like NNs, NPs are computationally efficient during training and evaluation but also learn to adapt their priors to data. We demonstrate the performance of NPs on a range of learning tasks, including regression and optimisation, and compare and contrast with related models in the literature.
Conditional Neural Processes
Jul 04, 2018



Deep neural networks excel at function approximation, yet they are typically trained from scratch for each new function. On the other hand, Bayesian methods, such as Gaussian Processes (GPs), exploit prior knowledge to quickly infer the shape of a new function at test time. Yet GPs are computationally expensive, and it can be hard to design appropriate priors. In this paper we propose a family of neural models, Conditional Neural Processes (CNPs), that combine the benefits of both. CNPs are inspired by the flexibility of stochastic processes such as GPs, but are structured as neural networks and trained via gradient descent. CNPs make accurate predictions after observing only a handful of training data points, yet scale to complex functions and large datasets. We demonstrate the performance and versatility of the approach on a range of canonical machine learning tasks, including regression, classification and image completion.
Unsupervised Learning of 3D Structure from Images
Jun 19, 2018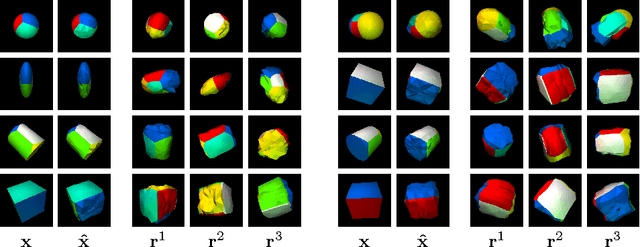
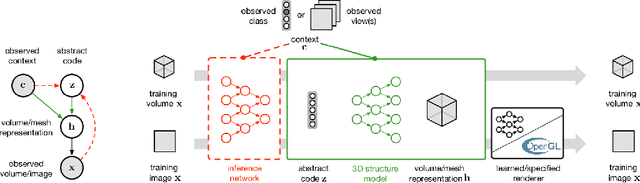

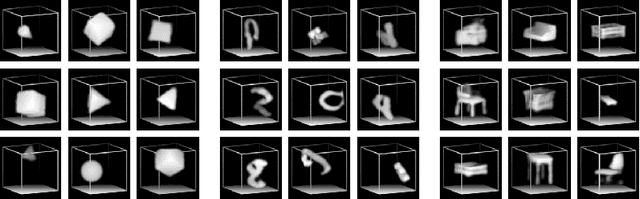
A key goal of computer vision is to recover the underlying 3D structure from 2D observations of the world. In this paper we learn strong deep generative models of 3D structures, and recover these structures from 3D and 2D images via probabilistic inference. We demonstrate high-quality samples and report log-likelihoods on several datasets, including ShapeNet [2], and establish the first benchmarks in the literature. We also show how these models and their inference networks can be trained end-to-end from 2D images. This demonstrates for the first time the feasibility of learning to infer 3D representations of the world in a purely unsupervised manner.
Synthesizing Programs for Images using Reinforced Adversarial Learning
Apr 03, 2018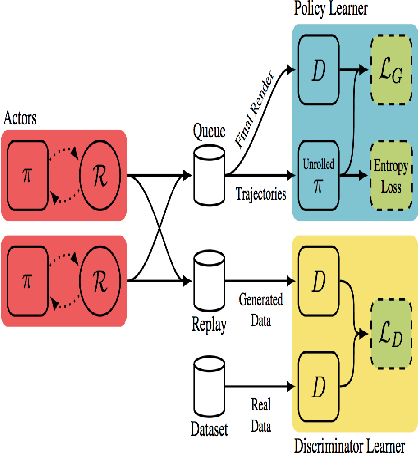
Advances in deep generative networks have led to impressive results in recent years. Nevertheless, such models can often waste their capacity on the minutiae of datasets, presumably due to weak inductive biases in their decoders. This is where graphics engines may come in handy since they abstract away low-level details and represent images as high-level programs. Current methods that combine deep learning and renderers are limited by hand-crafted likelihood or distance functions, a need for large amounts of supervision, or difficulties in scaling their inference algorithms to richer datasets. To mitigate these issues, we present SPIRAL, an adversarially trained agent that generates a program which is executed by a graphics engine to interpret and sample images. The goal of this agent is to fool a discriminator network that distinguishes between real and rendered data, trained with a distributed reinforcement learning setup without any supervision. A surprising finding is that using the discriminator's output as a reward signal is the key to allow the agent to make meaningful progress at matching the desired output rendering. To the best of our knowledge, this is the first demonstration of an end-to-end, unsupervised and adversarial inverse graphics agent on challenging real world (MNIST, Omniglot, CelebA) and synthetic 3D datasets.
Machine Theory of Mind
Mar 12, 2018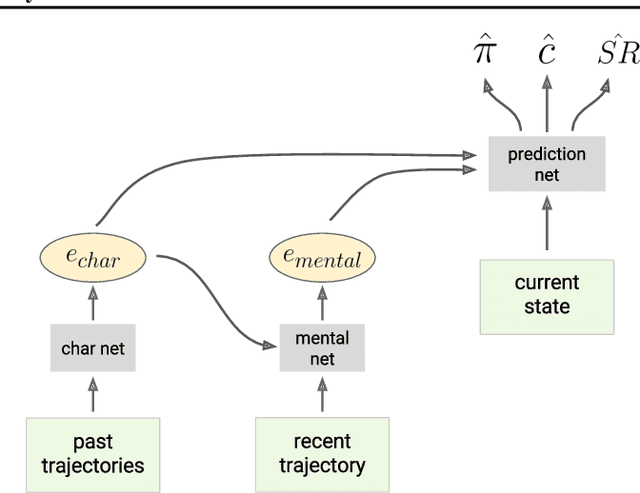
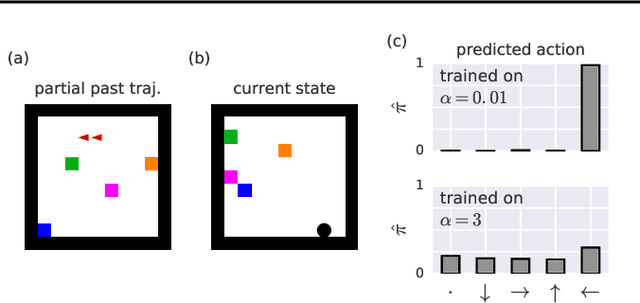
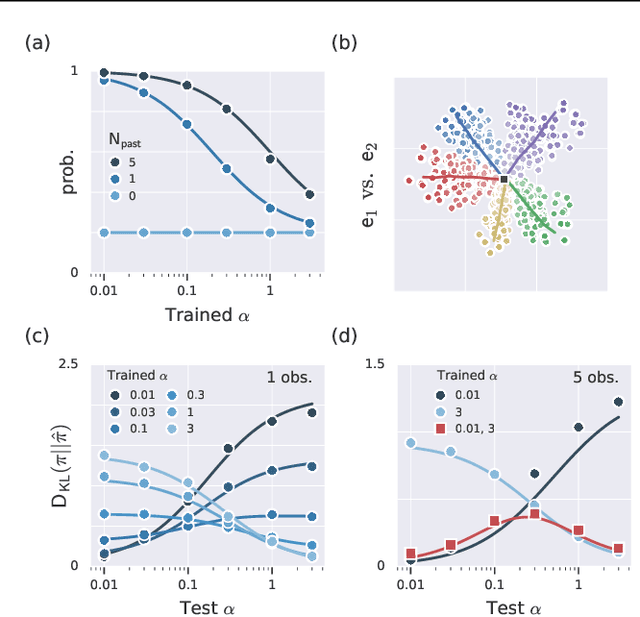
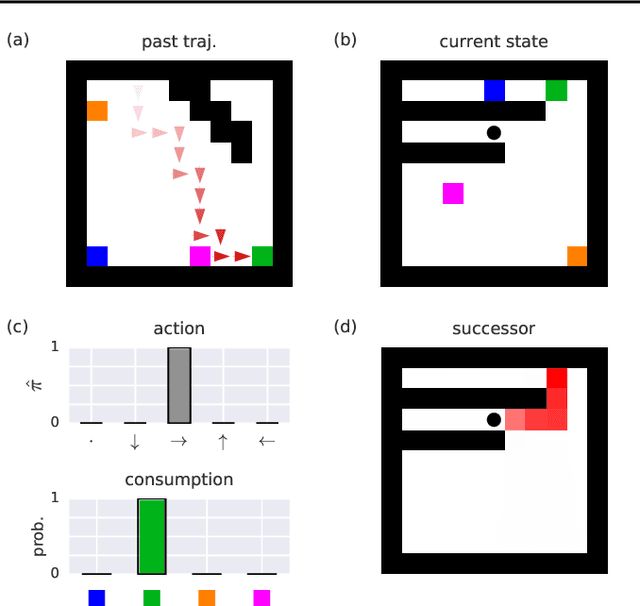
Theory of mind (ToM; Premack & Woodruff, 1978) broadly refers to humans' ability to represent the mental states of others, including their desires, beliefs, and intentions. We propose to train a machine to build such models too. We design a Theory of Mind neural network -- a ToMnet -- which uses meta-learning to build models of the agents it encounters, from observations of their behaviour alone. Through this process, it acquires a strong prior model for agents' behaviour, as well as the ability to bootstrap to richer predictions about agents' characteristics and mental states using only a small number of behavioural observations. We apply the ToMnet to agents behaving in simple gridworld environments, showing that it learns to model random, algorithmic, and deep reinforcement learning agents from varied populations, and that it passes classic ToM tasks such as the "Sally-Anne" test (Wimmer & Perner, 1983; Baron-Cohen et al., 1985) of recognising that others can hold false beliefs about the world. We argue that this system -- which autonomously learns how to model other agents in its world -- is an important step forward for developing multi-agent AI systems, for building intermediating technology for machine-human interaction, and for advancing the progress on interpretable AI.
Kickstarting Deep Reinforcement Learning
Mar 10, 2018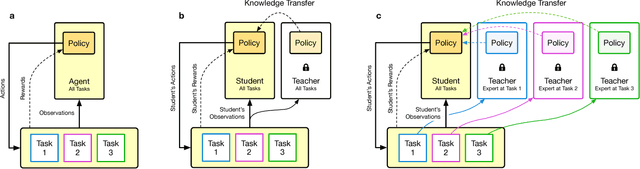
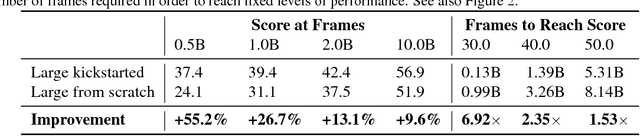
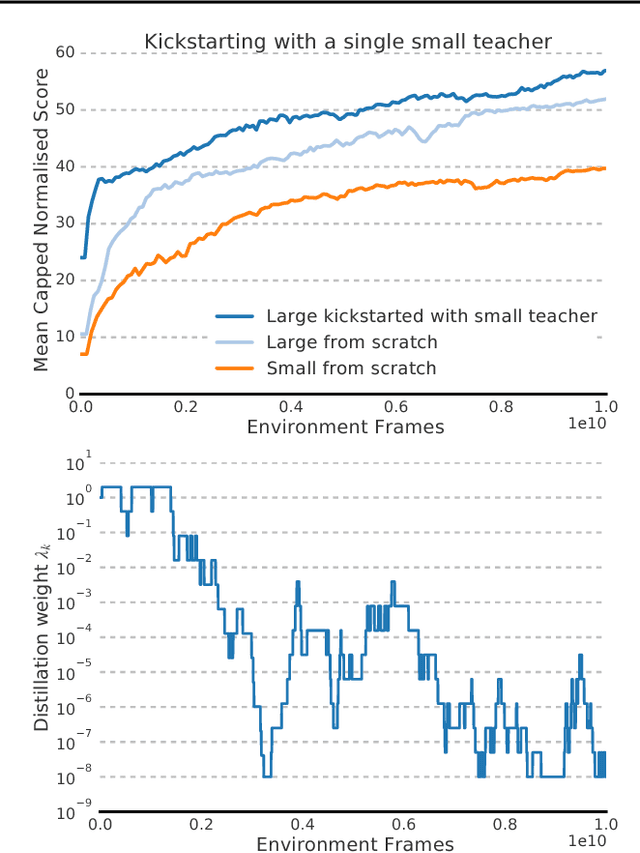
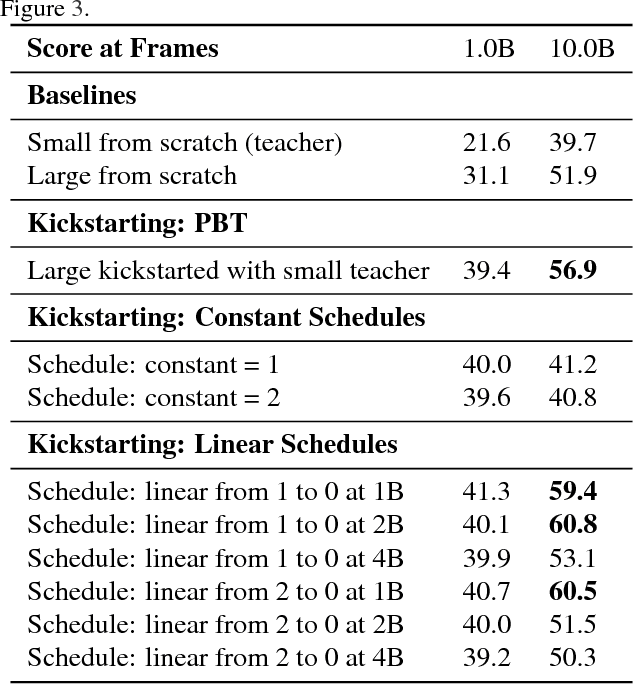
We present a method for using previously-trained 'teacher' agents to kickstart the training of a new 'student' agent. To this end, we leverage ideas from policy distillation and population based training. Our method places no constraints on the architecture of the teacher or student agents, and it regulates itself to allow the students to surpass their teachers in performance. We show that, on a challenging and computationally-intensive multi-task benchmark (DMLab-30), kickstarted training improves the data efficiency of new agents, making it significantly easier to iterate on their design. We also show that the same kickstarting pipeline can allow a single student agent to leverage multiple 'expert' teachers which specialize on individual tasks. In this setting kickstarting yields surprisingly large gains, with the kickstarted agent matching the performance of an agent trained from scratch in almost 10x fewer steps, and surpassing its final performance by 42 percent. Kickstarting is conceptually simple and can easily be incorporated into reinforcement learning experiments.
Few-shot Autoregressive Density Estimation: Towards Learning to Learn Distributions
Feb 28, 2018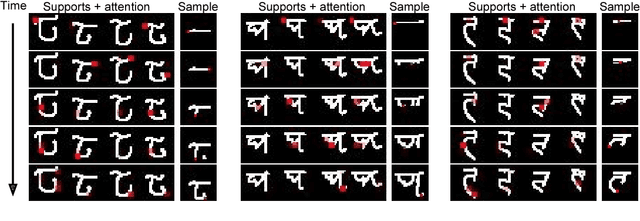
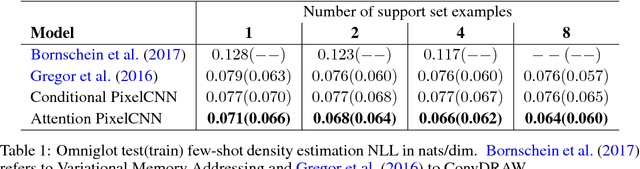
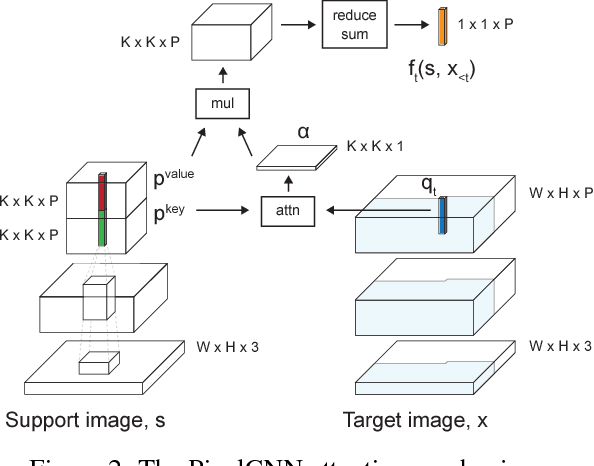
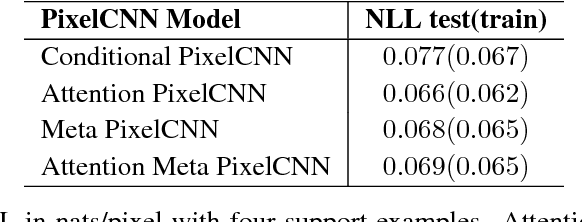
Deep autoregressive models have shown state-of-the-art performance in density estimation for natural images on large-scale datasets such as ImageNet. However, such models require many thousands of gradient-based weight updates and unique image examples for training. Ideally, the models would rapidly learn visual concepts from only a handful of examples, similar to the manner in which humans learns across many vision tasks. In this paper, we show how 1) neural attention and 2) meta learning techniques can be used in combination with autoregressive models to enable effective few-shot density estimation. Our proposed modifications to PixelCNN result in state-of-the art few-shot density estimation on the Omniglot dataset. Furthermore, we visualize the learned attention policy and find that it learns intuitive algorithms for simple tasks such as image mirroring on ImageNet and handwriting on Omniglot without supervision. Finally, we extend the model to natural images and demonstrate few-shot image generation on the Stanford Online Products dataset.
Learning and Querying Fast Generative Models for Reinforcement Learning
Feb 08, 2018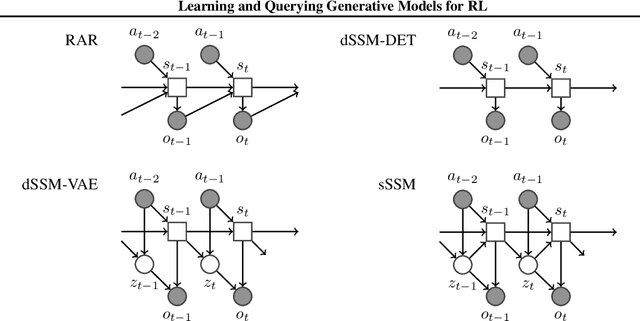
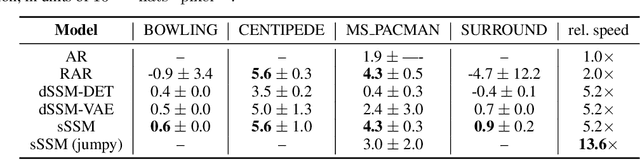
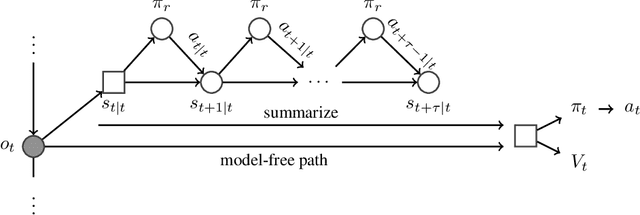
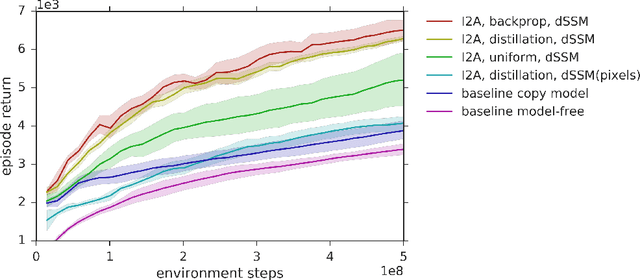
A key challenge in model-based reinforcement learning (RL) is to synthesize computationally efficient and accurate environment models. We show that carefully designed generative models that learn and operate on compact state representations, so-called state-space models, substantially reduce the computational costs for predicting outcomes of sequences of actions. Extensive experiments establish that state-space models accurately capture the dynamics of Atari games from the Arcade Learning Environment from raw pixels. The computational speed-up of state-space models while maintaining high accuracy makes their application in RL feasible: We demonstrate that agents which query these models for decision making outperform strong model-free baselines on the game MSPACMAN, demonstrating the potential of using learned environment models for planning.
Emergence of Locomotion Behaviours in Rich Environments
Jul 10, 2017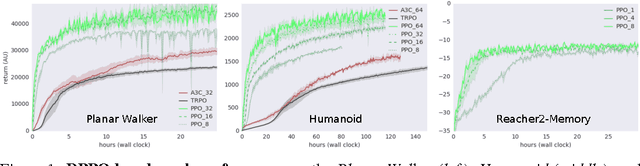
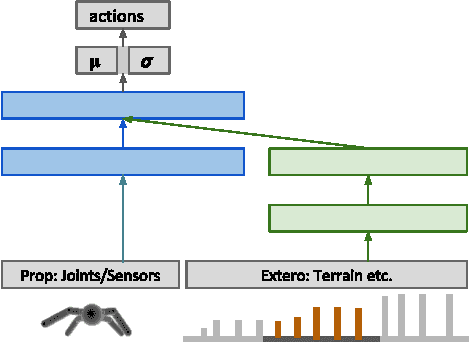
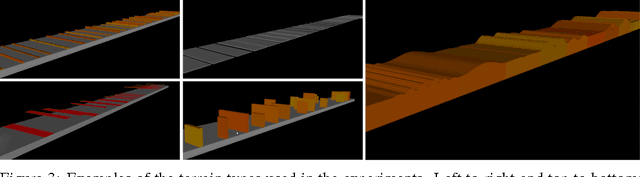

The reinforcement learning paradigm allows, in principle, for complex behaviours to be learned directly from simple reward signals. In practice, however, it is common to carefully hand-design the reward function to encourage a particular solution, or to derive it from demonstration data. In this paper explore how a rich environment can help to promote the learning of complex behavior. Specifically, we train agents in diverse environmental contexts, and find that this encourages the emergence of robust behaviours that perform well across a suite of tasks. We demonstrate this principle for locomotion -- behaviours that are known for their sensitivity to the choice of reward. We train several simulated bodies on a diverse set of challenging terrains and obstacles, using a simple reward function based on forward progress. Using a novel scalable variant of policy gradient reinforcement learning, our agents learn to run, jump, crouch and turn as required by the environment without explicit reward-based guidance. A visual depiction of highlights of the learned behavior can be viewed following https://youtu.be/hx_bgoTF7bs .
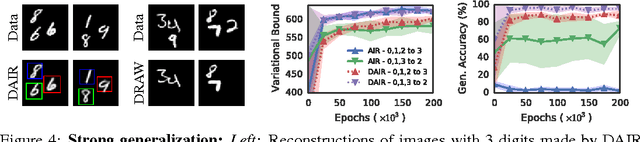
Attend, Infer, Repeat: Fast Scene Understanding with Generative Models
Aug 12, 2016
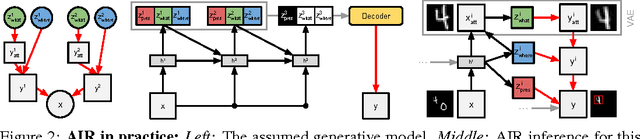
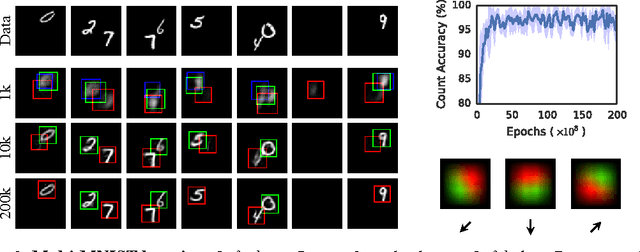
We present a framework for efficient inference in structured image models that explicitly reason about objects. We achieve this by performing probabilistic inference using a recurrent neural network that attends to scene elements and processes them one at a time. Crucially, the model itself learns to choose the appropriate number of inference steps. We use this scheme to learn to perform inference in partially specified 2D models (variable-sized variational auto-encoders) and fully specified 3D models (probabilistic renderers). We show that such models learn to identify multiple objects - counting, locating and classifying the elements of a scene - without any supervision, e.g., decomposing 3D images with various numbers of objects in a single forward pass of a neural network. We further show that the networks produce accurate inferences when compared to supervised counterparts, and that their structure leads to improved generalization.