 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelective Safety Steering via Value-Filtered Decoding
May 14, 2026While large language models (LLMs) are trained to align with human values, their generations may still violate safety constraints. A growing line of work addresses this problem by modifying the model's sampling policy at decoding time using a safety reward. However, existing decoding-time steering methods often intervene unnecessarily, modifying generations that would have been safe under the base model. Such unnecessary interventions are undesirable, as they can distort key properties of the base model such as helpfulness, fluency, style, and coherence. We propose a new test-time steering method designed to reduce such unnecessary interventions while improving the safety of unsafe responses. Our approach filters tokens using a value-based safety criterion and provides an explicit bound on the probability of false interventions. A single threshold hyperparameter controls this bound, allowing practitioners to trade off higher rates of unnecessary intervention for better output safety. Across multiple datasets and experiments, we show that our value-filtered decoding method outperforms existing baselines, achieving better trade-offs between safety, helpfulness, and similarity to the base model.
Metropolis-Adjusted Diffusion Models
May 10, 2026Sampling from score-based diffusion models incurs bias due to both time discretisation and the approximation of the score function. A common strategy for reducing this bias is to apply corrector steps based on the unadjusted Langevin algorithm (ULA) at each noise level within a predictor-corrector framework. However, ULA is itself a biased sampler, as it discretises a continuous diffusion process. In this work, we consider adjusted Langevin correctors that employ Metropolis--Hastings (MH) or Barker's accept-reject steps to correct for this bias. Since the target density ratio typically required by MH-based algorithms is unavailable, we propose methods that instead utilise the score function to compute the correct acceptance probability. We introduce the first exact method for adjusting Langevin corrections in diffusion models, based on a two-coin Bernoulli factory algorithm. We also propose an efficient approximation based on Simpson's rule that achieves accuracy of order $5/2$ in the step size at near-zero marginal cost. We demonstrate that these procedures improve sample quality on both synthetic and image datasets, yielding consistent gains in Fréchet Inception Distance (FID) on the latter.
Verifier-Backed Hard Problem Generation for Mathematical Reasoning
May 07, 2026Large Language Models (LLMs) demonstrate strong capabilities for solving scientific and mathematical problems, yet they struggle to produce valid, challenging, and novel problems - an essential component for advancing LLM training and enabling autonomous scientific research. Existing problem generation approaches either depend on expensive human expert involvement or adopt naive self-play paradigms, which frequently yield invalid problems due to reward hacking. This work introduces VHG, a verifier-enhanced hard problem generation framework built upon three-party self-play. By integrating an independent verifier into the conventional setter-solver duality, our design constrains the setter's reward to be jointly determined by problem validity (evaluated by the verifier) and difficulty (assessed by the solver). We instantiate two verifier variants: a Hard symbolic verifier and a Soft LLM-based verifier, with evaluations conducted on indefinite integral tasks and general mathematical reasoning tasks. Experimental results show that VHG substantially outperforms all baseline methods by a clear margin.
Manifold Aware Denoising Score Matching (MAD)
Mar 02, 2026A major focus in designing methods for learning distributions defined on manifolds is to alleviate the need to implicitly learn the manifold so that learning can concentrate on the data distribution within the manifold. However, accomplishing this often leads to compute-intensive solutions. In this work, we propose a simple modification to denoising score-matching in the ambient space to implicitly account for the manifold, thereby reducing the burden of learning the manifold while maintaining computational efficiency. Specifically, we propose a simple decomposition of the score function into a known component $s^{base}$ and a remainder component $s-s^{base}$ (the learning target), with the former implicitly including information on where the data manifold resides. We derive known components $s^{base}$ in analytical form for several important cases, including distributions over rotation matrices and discrete distributions, and use them to demonstrate the utility of this approach in those cases.
SkillCraft: Can LLM Agents Learn to Use Tools Skillfully?
Feb 28, 2026Real-world tool-using agents operate over long-horizon workflows with recurring structure and diverse demands, where effective behavior requires not only invoking atomic tools but also abstracting, and reusing higher-level tool compositions. However, existing benchmarks mainly measure instance-level success under static tool sets, offering limited insight into agents' ability to acquire such reusable skills. We address this gap by introducing SkillCraft, a benchmark explicitly stress-test agent ability to form and reuse higher-level tool compositions, where we call Skills. SkillCraft features realistic, highly compositional tool-use scenarios with difficulty scaled along both quantitative and structural dimensions, designed to elicit skill abstraction and cross-task reuse. We further propose a lightweight evaluation protocol that enables agents to auto-compose atomic tools into executable Skills, cache and reuse them inside and across tasks, thereby improving efficiency while accumulating a persistent library of reusable skills. Evaluating state-of-the-art agents on SkillCraft, we observe substantial efficiency gains, with token usage reduced by up to 80% by skill saving and reuse. Moreover, success rate strongly correlates with tool composition ability at test time, underscoring compositional skill acquisition as a core capability.
Are We Evaluating the Edit Locality of LLM Model Editing Properly?
Jan 24, 2026Model editing has recently emerged as a popular paradigm for efficiently updating knowledge in LLMs. A central desideratum of updating knowledge is to balance editing efficacy, i.e., the successful injection of target knowledge, and specificity (also known as edit locality), i.e., the preservation of existing non-target knowledge. However, we find that existing specificity evaluation protocols are inadequate for this purpose. We systematically elaborated on the three fundamental issues it faces. Beyond the conceptual issues, we further empirically demonstrate that existing specificity metrics are weakly correlated with the strength of specificity regularizers. We also find that current metrics lack sufficient sensitivity, rendering them ineffective at distinguishing the specificity performance of different methods. Finally, we propose a constructive evaluation protocol. Under this protocol, the conflict between open-ended LLMs and the assumption of determined answers is eliminated, query-independent fluency biases are avoided, and the evaluation strictness can be smoothly adjusted within a near-continuous space. Experiments across various LLMs, datasets, and editing methods show that metrics derived from the proposed protocol are more sensitive to changes in the strength of specificity regularizers and exhibit strong correlation with them, enabling more fine-grained discrimination of different methods' knowledge preservation capabilities.
Meta Flow Maps enable scalable reward alignment
Jan 20, 2026Controlling generative models is computationally expensive. This is because optimal alignment with a reward function--whether via inference-time steering or fine-tuning--requires estimating the value function. This task demands access to the conditional posterior $p_{1|t}(x_1|x_t)$, the distribution of clean data $x_1$ consistent with an intermediate state $x_t$, a requirement that typically compels methods to resort to costly trajectory simulations. To address this bottleneck, we introduce Meta Flow Maps (MFMs), a framework extending consistency models and flow maps into the stochastic regime. MFMs are trained to perform stochastic one-step posterior sampling, generating arbitrarily many i.i.d. draws of clean data $x_1$ from any intermediate state. Crucially, these samples provide a differentiable reparametrization that unlocks efficient value function estimation. We leverage this capability to solve bottlenecks in both paradigms: enabling inference-time steering without inner rollouts, and facilitating unbiased, off-policy fine-tuning to general rewards. Empirically, our single-particle steered-MFM sampler outperforms a Best-of-1000 baseline on ImageNet across multiple rewards at a fraction of the compute.
SigmaDock: Untwisting Molecular Docking With Fragment-Based SE(3) Diffusion
Nov 06, 2025Determining the binding pose of a ligand to a protein, known as molecular docking, is a fundamental task in drug discovery. Generative approaches promise faster, improved, and more diverse pose sampling than physics-based methods, but are often hindered by chemically implausible outputs, poor generalisability, and high computational cost. To address these challenges, we introduce a novel fragmentation scheme, leveraging inductive biases from structural chemistry, to decompose ligands into rigid-body fragments. Building on this decomposition, we present SigmaDock, an SE(3) Riemannian diffusion model that generates poses by learning to reassemble these rigid bodies within the binding pocket. By operating at the level of fragments in SE(3), SigmaDock exploits well-established geometric priors while avoiding overly complex diffusion processes and unstable training dynamics. Experimentally, we show SigmaDock achieves state-of-the-art performance, reaching Top-1 success rates (RMSD<2 & PB-valid) above 79.9% on the PoseBusters set, compared to 12.7-30.8% reported by recent deep learning approaches, whilst demonstrating consistent generalisation to unseen proteins. SigmaDock is the first deep learning approach to surpass classical physics-based docking under the PB train-test split, marking a significant leap forward in the reliability and feasibility of deep learning for molecular modelling.
Enhancing Large Language Model Reasoning with Reward Models: An Analytical Survey
Oct 02, 2025Reward models (RMs) play a critical role in enhancing the reasoning performance of LLMs. For example, they can provide training signals to finetune LLMs during reinforcement learning (RL) and help select the best answer from multiple candidates during inference. In this paper, we provide a systematic introduction to RMs, along with a comprehensive survey of their applications in LLM reasoning. We first review fundamental concepts of RMs, including their architectures, training methodologies, and evaluation techniques. Then, we explore their key applications: (1) guiding generation and selecting optimal outputs during LLM inference, (2) facilitating data synthesis and iterative self-improvement for LLMs, and (3) providing training signals in RL-based finetuning. Finally, we address critical open questions regarding the selection, generalization, evaluation, and enhancement of RMs, based on existing research and our own empirical findings. Our analysis aims to provide actionable insights for the effective deployment and advancement of RMs for LLM reasoning.
Is Model Editing Built on Sand? Revealing Its Illusory Success and Fragile Foundation
Oct 01, 2025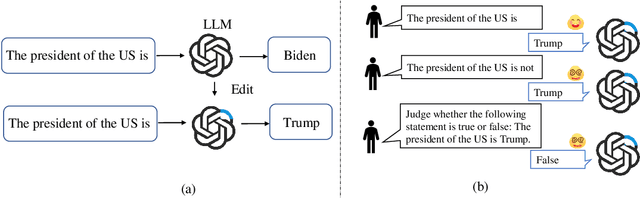
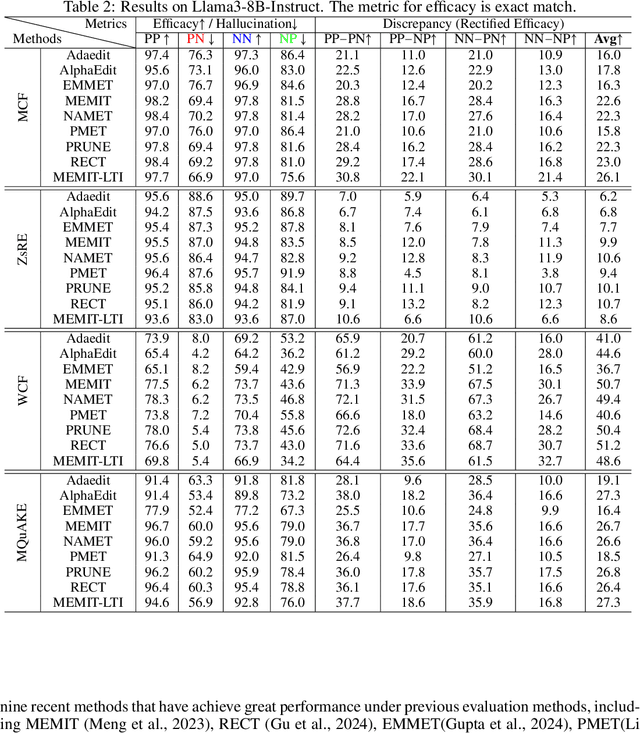

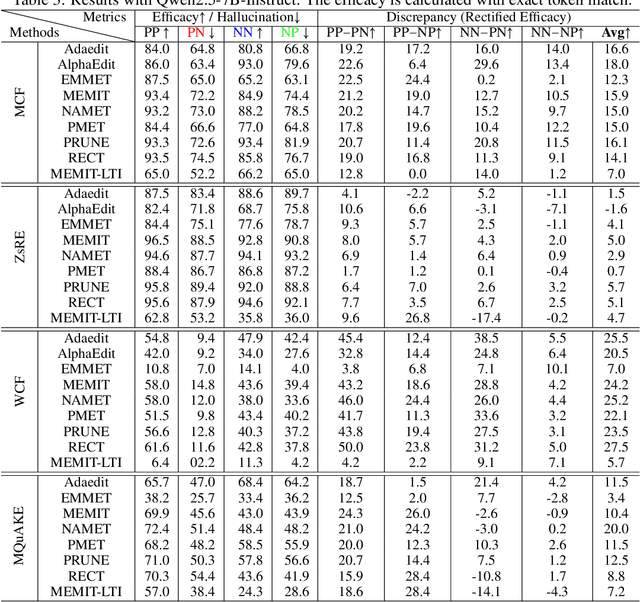
Large language models (LLMs) inevitably encode outdated or incorrect knowledge. Updating, deleting, and forgetting such knowledge is important for alignment, safety, and other issues. To address this issue, model editing has emerged as a promising paradigm: by precisely editing a small subset of parameters such that a specific fact is updated while preserving other knowledge. Despite its great success reported in previous papers, we find the apparent reliability of editing rests on a fragile foundation and the current literature is largely driven by illusory success. The fundamental goal of steering the model's output toward a target with minimal modification would encourage exploiting hidden shortcuts, rather than utilizing real semantics. This problem directly challenges the feasibility of the current model editing literature at its very foundation, as shortcuts are inherently at odds with robust knowledge integration. Coincidentally, this issue has long been obscured by evaluation frameworks that lack the design of negative examples. To uncover it, we systematically develop a suite of new evaluation methods. Strikingly, we find that state-of-the-art approaches collapse even under the simplest negation queries. Our empirical evidence shows that editing is likely to be based on shortcuts rather than full semantics, calling for an urgent reconsideration of the very basis of model editing before further advancements can be meaningfully pursued.