 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMonitoring and Diagnosability of Perception Systems
Nov 19, 2020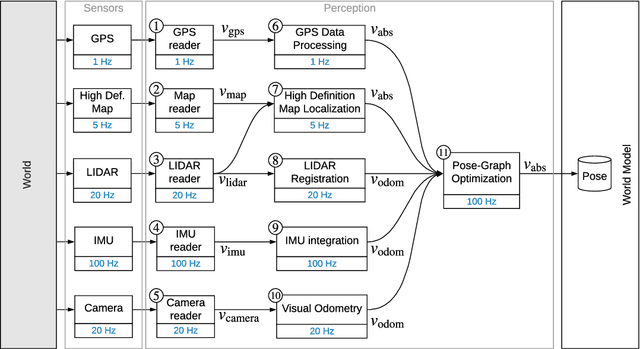
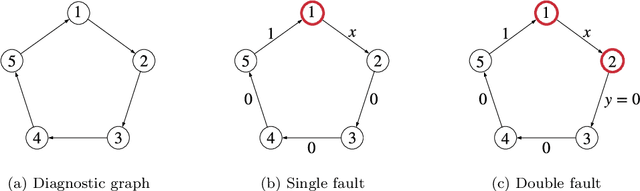
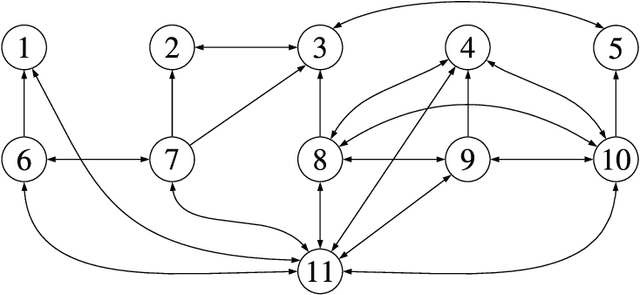
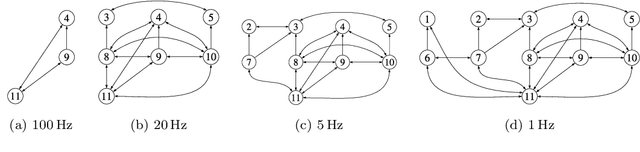
Perception is a critical component of high-integrity applications of robotics and autonomous systems, such as self-driving vehicles. In these applications, failure of perception systems may put human life at risk, and a broad adoption of these technologies requires the development of methodologies to guarantee and monitor safe operation. Despite the paramount importance of perception systems, currently there is no formal approach for system-level monitoring. In this work, we propose a mathematical model for runtime monitoring and fault detection and identification in perception systems. Towards this goal, we draw connections with the literature on diagnosability in multiprocessor systems, and generalize it to account for modules with heterogeneous outputs that interact over time. The resulting temporal diagnostic graphs (i) provide a framework to reason over the consistency of perception outputs -- across modules and over time -- thus enabling fault detection, (ii) allow us to establish formal guarantees on the maximum number of faults that can be uniquely identified in a given perception system, and (iii) enable the design of efficient algorithms for fault identification. We demonstrate our monitoring system, dubbed PerSyS, in realistic simulations using the LGSVL self-driving simulator and the Apollo Auto autonomy software stack, and show that PerSyS is able to detect failures in challenging scenarios (including scenarios that have caused self-driving car accidents in recent years), and is able to correctly identify faults while entailing a minimal computation overhead (< 5ms on a single-core CPU).
Kimera-Multi: a System for Distributed Multi-Robot Metric-Semantic Simultaneous Localization and Mapping
Nov 08, 2020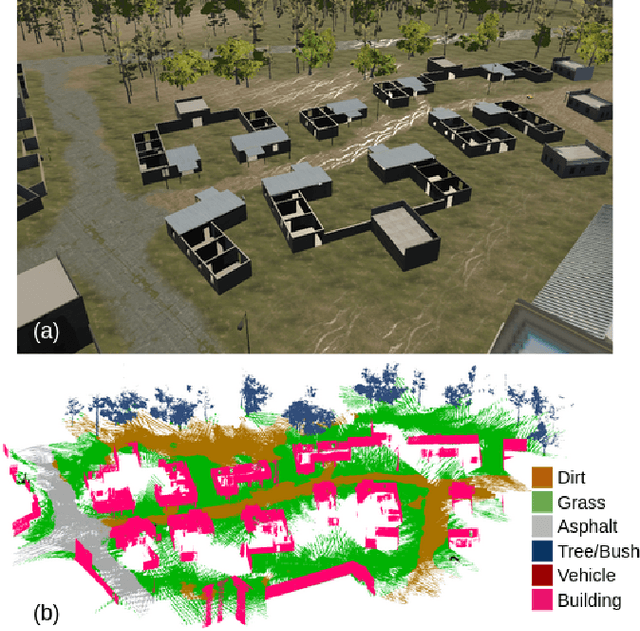
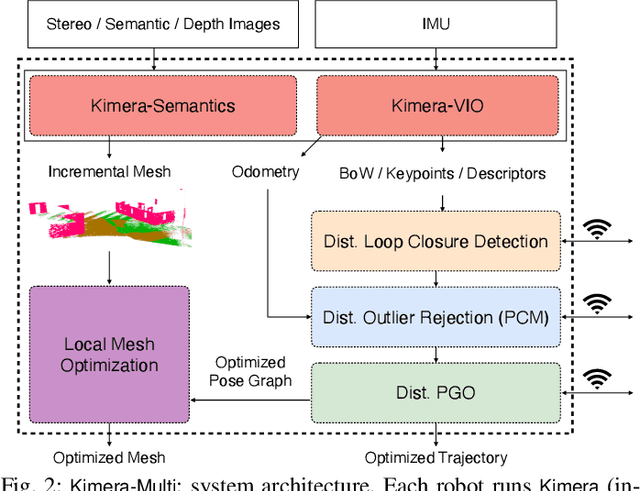
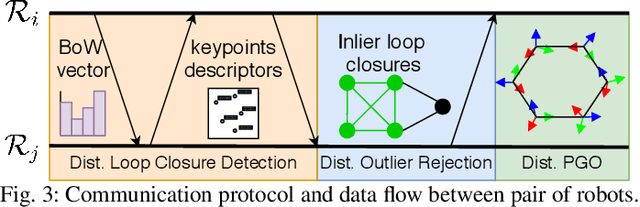
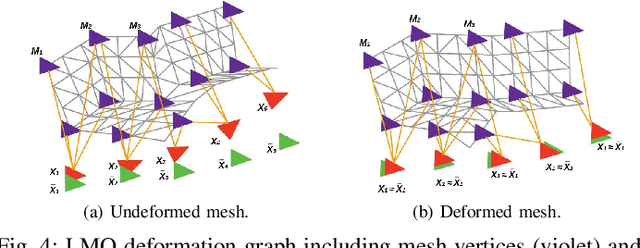
We present the first fully distributed multi-robot system for dense metric-semantic Simultaneous Localization and Mapping (SLAM). Our system, dubbed Kimera-Multi, is implemented by a team of robots equipped with visual-inertial sensors, and builds a 3D mesh model of the environment in real-time, where each face of the mesh is annotated with a semantic label (e.g., building, road, objects). In Kimera-Multi, each robot builds a local trajectory estimate and a local mesh using Kimera. Then, when two robots are within communication range, they initiate a distributed place recognition and robust pose graph optimization protocol with a novel incremental maximum clique outlier rejection; the protocol allows the robots to improve their local trajectory estimates by leveraging inter-robot loop closures. Finally, each robot uses its improved trajectory estimate to correct the local mesh using mesh deformation techniques. We demonstrate Kimera-Multi in photo-realistic simulations and real data. Kimera-Multi (i) is able to build accurate 3D metric-semantic meshes, (ii) is robust to incorrect loop closures while requiring less computation than state-of-the-art distributed SLAM back-ends, and (iii) is efficient, both in terms of computation at each robot as well as communication bandwidth.
ROBIN: a Graph-Theoretic Approach to Reject Outliers in Robust Estimation using Invariants
Nov 07, 2020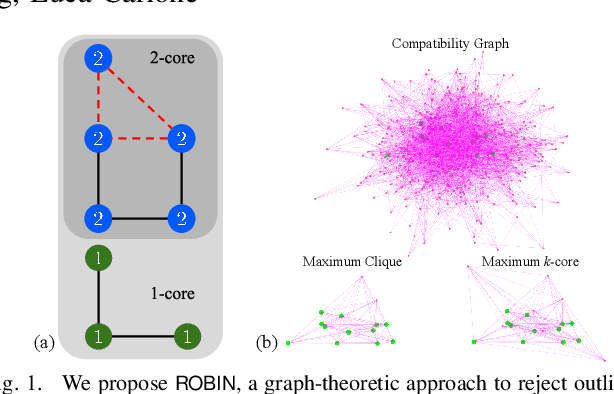
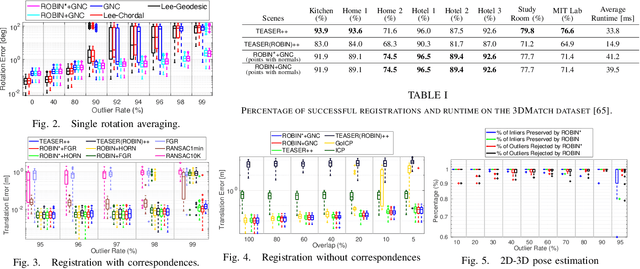
Many estimation problems in robotics, computer vision, and learning require estimating unknown quantities in the face of outliers. Outliers are typically the result of incorrect data association or feature matching, and it is common to have problems where more than 90% of the measurements used for estimation are outliers. While current approaches for robust estimation are able to deal with moderate amounts of outliers, they fail to produce accurate estimates in the presence of many outliers. This paper develops an approach to prune outliers. First, we develop a theory of invariance that allows us to quickly check if a subset of measurements are mutually compatible without explicitly solving the estimation problem. Second, we develop a graph-theoretic framework, where measurements are modeled as vertices and mutual compatibility is captured by edges. We generalize existing results showing that the inliers form a clique in this graph and typically belong to the maximum clique. We also show that in practice the maximum k-core of the compatibility graph provides an approximation of the maximum clique, while being faster to compute in large problems. These two contributions leads to ROBIN, our approach to Reject Outliers Based on INvariants, which allows us to quickly prune outliers in generic estimation problems. We demonstrate ROBIN in four geometric perception problems and show it boosts robustness of existing solvers while running in milliseconds in large problems.
Primal-Dual Mesh Convolutional Neural Networks
Oct 23, 2020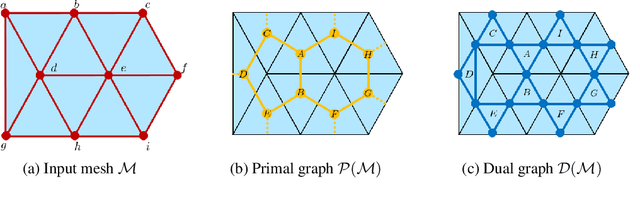
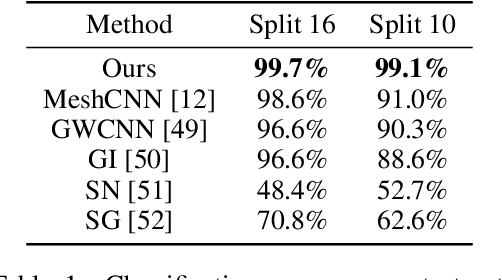

Recent works in geometric deep learning have introduced neural networks that allow performing inference tasks on three-dimensional geometric data by defining convolution, and sometimes pooling, operations on triangle meshes. These methods, however, either consider the input mesh as a graph, and do not exploit specific geometric properties of meshes for feature aggregation and downsampling, or are specialized for meshes, but rely on a rigid definition of convolution that does not properly capture the local topology of the mesh. We propose a method that combines the advantages of both types of approaches, while addressing their limitations: we extend a primal-dual framework drawn from the graph-neural-network literature to triangle meshes, and define convolutions on two types of graphs constructed from an input mesh. Our method takes features for both edges and faces of a 3D mesh as input and dynamically aggregates them using an attention mechanism. At the same time, we introduce a pooling operation with a precise geometric interpretation, that allows handling variations in the mesh connectivity by clustering mesh faces in a task-driven fashion. We provide theoretical insights of our approach using tools from the mesh-simplification literature. In addition, we validate experimentally our method in the tasks of shape classification and shape segmentation, where we obtain comparable or superior performance to the state of the art.
* Accepted to the 34th Conference on Neural Information Processing Systems (NeurIPS 2020), Vancouver, Canada. Code available at: https://github.com/MIT-SPARK/PD-MeshNet
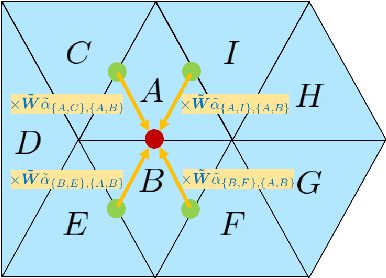
Shonan Rotation Averaging: Global Optimality by Surfing $SO(p)^n$
Aug 06, 2020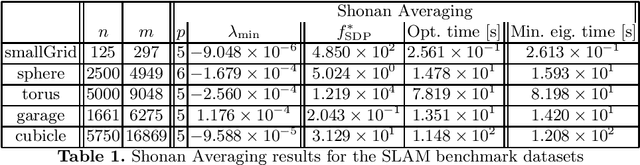
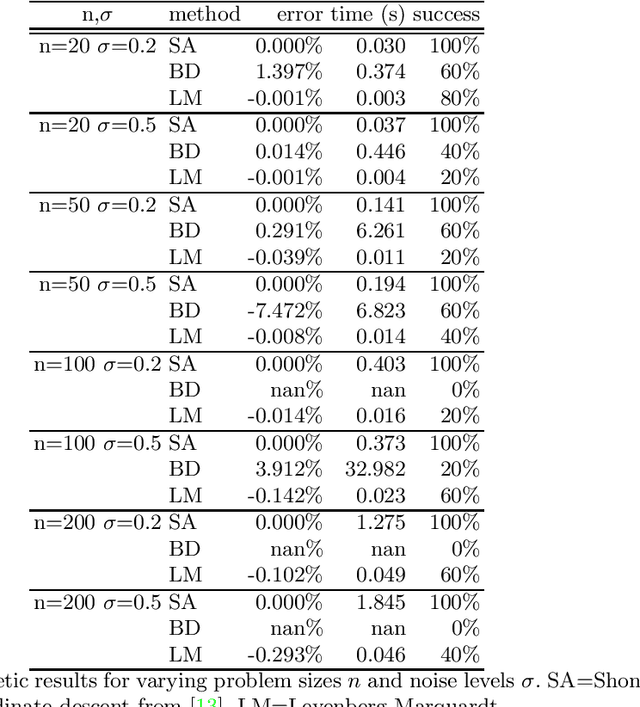
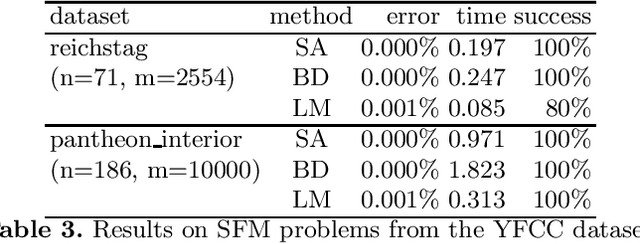
Shonan Rotation Averaging is a fast, simple, and elegant rotation averaging algorithm that is guaranteed to recover globally optimal solutions under mild assumptions on the measurement noise. Our method employs semidefinite relaxation in order to recover provably globally optimal solutions of the rotation averaging problem. In contrast to prior work, we show how to solve large-scale instances of these relaxations using manifold minimization on (only slightly) higher-dimensional rotation manifolds, re-using existing high-performance (but local) structure-from-motion pipelines. Our method thus preserves the speed and scalability of current SFM methods, while recovering globally optimal solutions.
Outlier-Robust Estimation: Hardness, Minimally-Tuned Algorithms, and Applications
Jul 29, 2020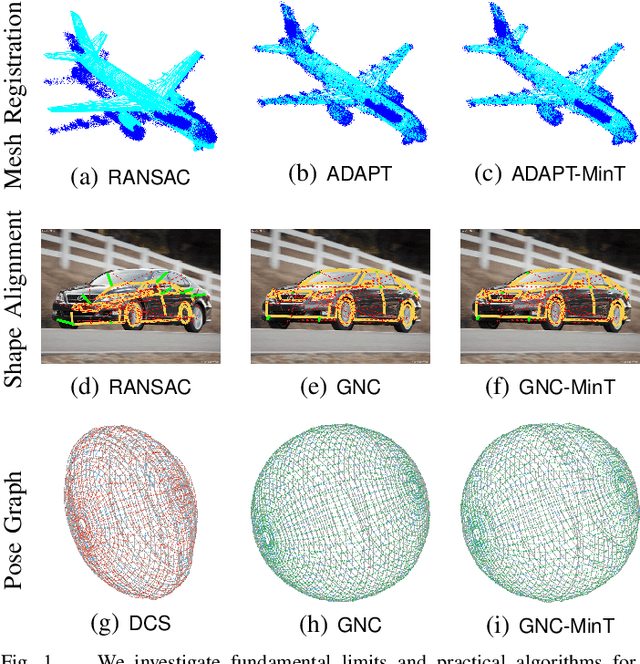
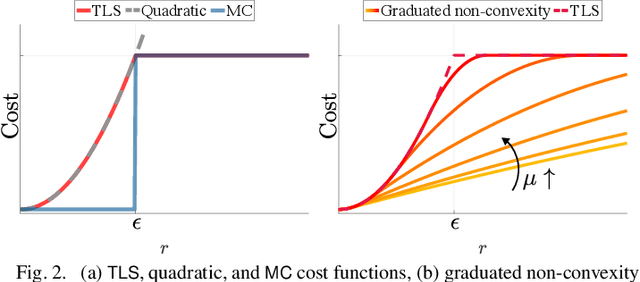
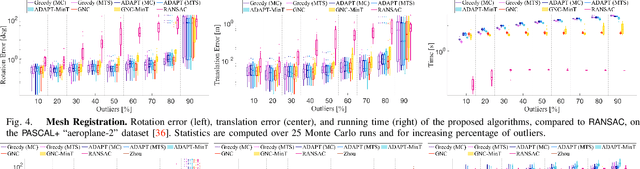
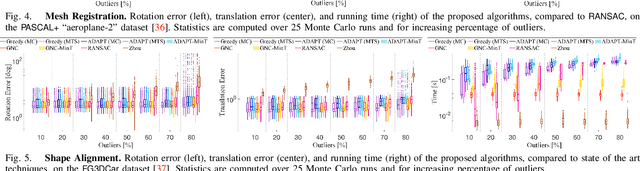
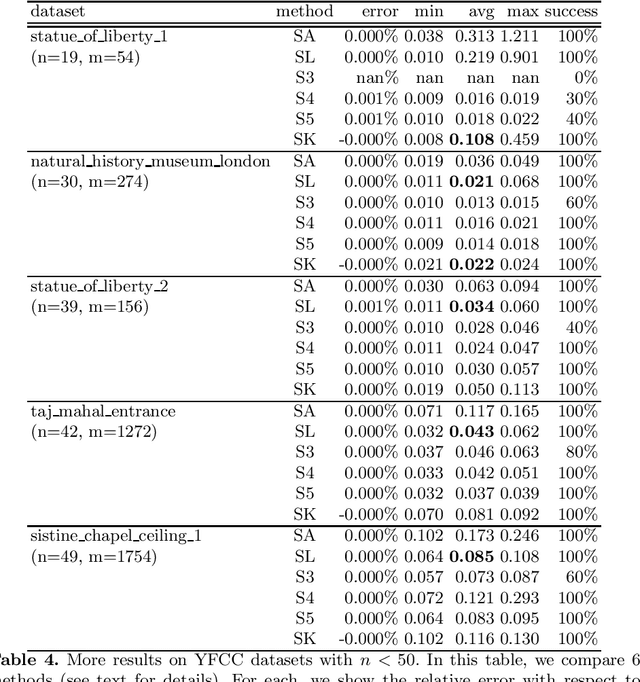
Nonlinear estimation in robotics and vision is typically plagued with outliers due to wrong data association, or to incorrect detections from signal processing and machine learning methods. This paper introduces two unifying formulations for outlier-robust estimation, Generalized Maximum Consensus (G- MC) and Generalized Truncated Least Squares (G-TLS), and investigates fundamental limits, practical algorithms, and applications. Our first contribution is a proof that outlier-robust estimation is inapproximable: in the worst case, it is impossible to (even approximately) find the set of outliers, even with slower-than-polynomial-time algorithms (particularly, algorithms running in quasi-polynomial time). As a second contribution, we review and extend two general-purpose algorithms. The first, Adaptive Trimming (ADAPT), is combinatorial, and is suitable for G-MC; the second, Graduated Non-Convexity (GNC), is based on homotopy methods, and is suitable for G-TLS. We extend ADAPT and GNC to the case where the user does not have prior knowledge of the inlier-noise statistics (or the statistics may vary over time) and is unable to guess a reasonable threshold to separate inliers from outliers (as the one commonly used in RANSAC). We propose the first minimally-tuned algorithms for outlier rejection, that dynamically decide how to separate inliers from outliers. Our third contribution is an evaluation of the proposed algorithms on robot perception problems: mesh registration, image-based object detection (shape alignment), and pose graph optimization. ADAPT and GNC execute in real-time, are deterministic, outperform RANSAC, and are robust to 70-90% outliers. Their minimally-tuned versions also compare favorably with the state of the art, even though they do not rely on a noise bound for the inliers.
One Ring to Rule Them All: Certifiably Robust Geometric Perception with Outliers
Jun 11, 2020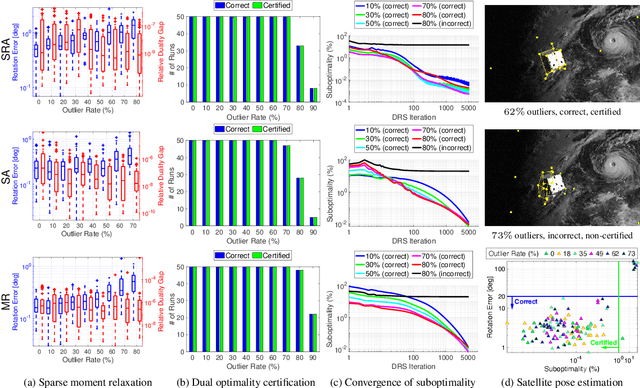
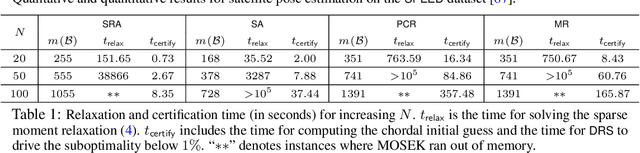
We propose a general and practical framework to design certifiable algorithms for robust geometric perception in the presence of a large amount of outliers. We investigate the use of a truncated least squares (TLS) cost function, which is known to be robust to outliers, but leads to hard, nonconvex, and nonsmooth optimization problems. Our first contribution is to show that -for a broad class of geometric perception problems- TLS estimation can be reformulated as an optimization over the ring of polynomials and Lasserre's hierarchy of convex moment relaxations is empirically tight at the minimum relaxation order (i.e., certifiably obtains the global minimum of the nonconvex TLS problem). Our second contribution is to exploit the structural sparsity of the objective and constraint polynomials and leverage basis reduction to significantly reduce the size of the semidefinite program (SDP) resulting from the moment relaxation, without compromising its tightness. Our third contribution is to develop scalable dual optimality certifiers from the lens of sums-of-squares (SOS) relaxation, that can compute the suboptimality gap and possibly certify global optimality of any candidate solution (e.g., returned by fast heuristics such as RANSAC or graduated non-convexity). Our dual certifiers leverage Douglas-Rachford Splitting to solve a convex feasibility SDP. Numerical experiments across different perception problems, including high-integrity satellite pose estimation, demonstrate the tightness of our relaxations, the correctness of the certification, and the scalability of the proposed dual certifiers to large problems, beyond the reach of current SDP solvers.
Online Monitoring for Neural Network Based Monocular Pedestrian Pose Estimation
May 11, 2020
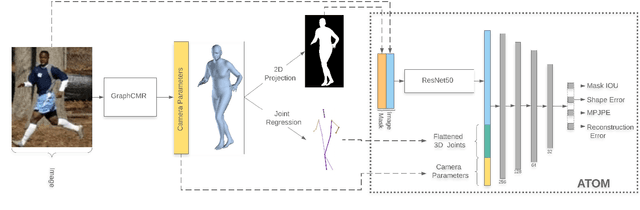
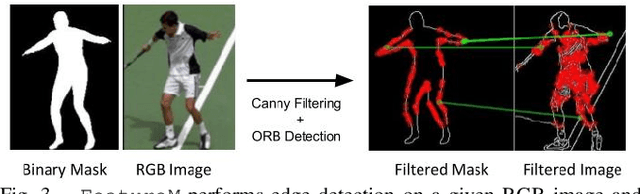
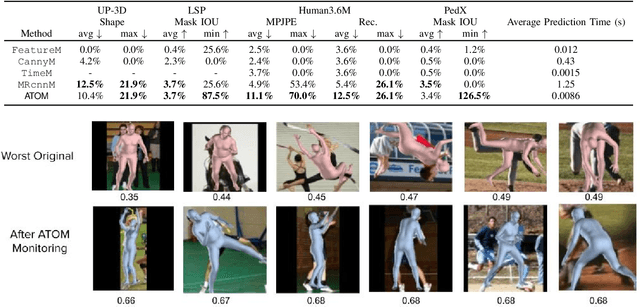
Several autonomy pipelines now have core components that rely on deep learning approaches. While these approaches work well in nominal conditions, they tend to have unexpected and severe failure modes that create concerns when used in safety-critical applications, including self-driving cars. There are several works that aim to characterize the robustness of networks offline, but currently there is a lack of tools to monitor the correctness of network outputs online during operation. We investigate the problem of online output monitoring for neural networks that estimate 3D human shapes and poses from images. Our first contribution is to present and evaluate model-based and learning-based monitors for a human-pose-and-shape reconstruction network, and assess their ability to predict the output loss for a given test input. As a second contribution, we introduce an Adversarially-Trained Online Monitor ( ATOM ) that learns how to effectively predict losses from data. ATOM dominates model-based baselines and can detect bad outputs, leading to substantial improvements in human pose output quality. Our final contribution is an extensive experimental evaluation that shows that discarding outputs flagged as incorrect by ATOM improves the average error by 12.5%, and the worst-case error by 126.5%.
Control and Trajectory Optimization for Soft Aerial Manipulation
Apr 08, 2020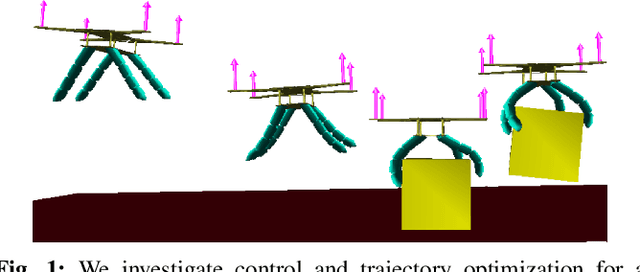
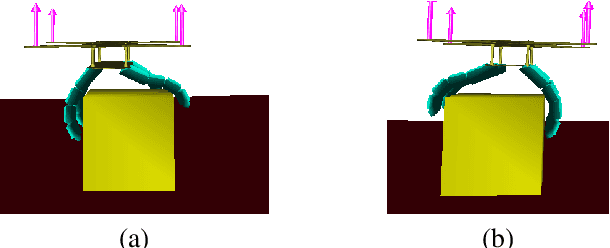
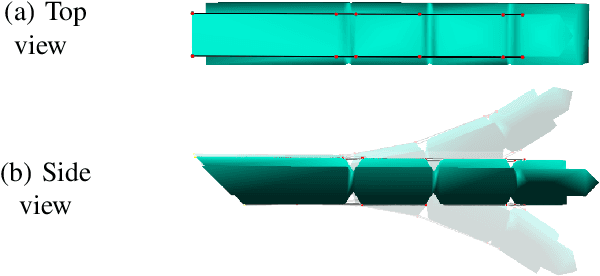
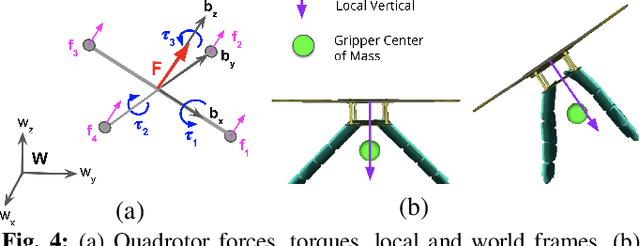
Manipulation and grasping with unmanned aerial vehicles (UAVs) currently require accurate positioning and are often executed at reduced speed to ensure successful grasps. This is due to the fact that typical UAVs can only accommodate rigid manipulators with few degrees of freedom, which limits their capability to compensate for disturbances caused by the vehicle positioning errors. Moreover, they have to minimize external contact forces in order to maintain stability. Biological systems, on the other hand, exploit softness to overcome similar limitations, and fully exploit compliance to enable aggressive grasping. This paper investigates control and trajectory optimization for a soft aerial manipulator, consisting of a quadrotor and a tendon-actuated soft gripper, in which the advantages of softness can be fully exploited. To the best of our knowledge, this is the first work at the intersection between soft manipulation and UAV control. We present a decoupled approach for the quadrotor and the soft gripper, combining (i) a geometric controller and a minimum-snap trajectory optimization for the quadrotor (rigid) base, with (ii) a quasi-static finite element model and control-space interpolation for the soft gripper. We prove that the geometric controller asymptotically stabilizes the quadrotor velocity and attitude despite the addition of the soft load. Finally, we evaluate the proposed system in a realistic soft dynamics simulator, and show that: (i) the geometric controller is fairly insensitive to the soft payload, (ii) the platform can reliably grasp unknown objects despite inaccurate positioning and initial conditions, and (iii) the decoupled controller is amenable for real-time execution.
LAMP: Large-Scale Autonomous Mapping and Positioning for Exploration of Perceptually-Degraded Subterranean Environments
Mar 05, 2020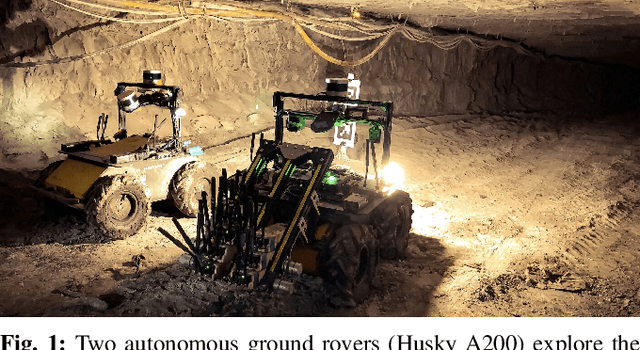
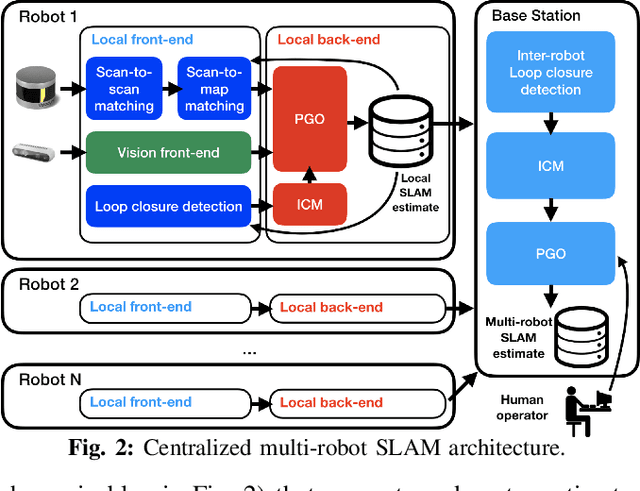
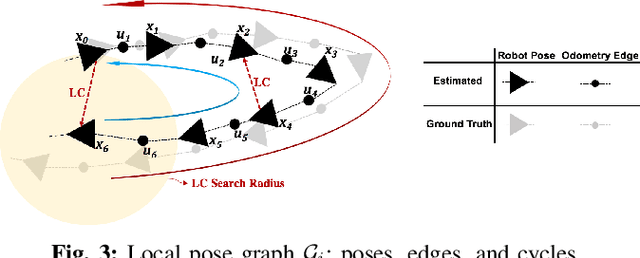
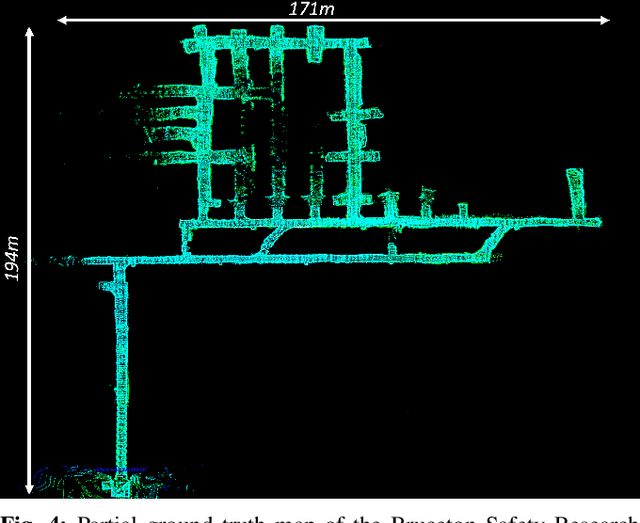
Simultaneous Localization and Mapping (SLAM) in large-scale, unknown, and complex subterranean environments is a challenging problem. Sensors must operate in off-nominal conditions; uneven and slippery terrains make wheel odometry inaccurate, while long corridors without salient features make exteroceptive sensing ambiguous and prone to drift; finally, spurious loop closures that are frequent in environments with repetitive appearance, such as tunnels and mines, could result in a significant distortion of the entire map. These challenges are in stark contrast with the need to build highly-accurate 3D maps to support a wide variety of applications, ranging from disaster response to the exploration of underground extraterrestrial worlds. This paper reports on the implementation and testing of a lidar-based multi-robot SLAM system developed in the context of the DARPA Subterranean Challenge. We present a system architecture to enhance subterranean operation, including an accurate lidar-based front-end, and a flexible and robust back-end that automatically rejects outlying loop closures. We present an extensive evaluation in large-scale, challenging subterranean environments, including the results obtained in the Tunnel Circuit of the DARPA Subterranean Challenge. Finally, we discuss potential improvements, limitations of the state of the art, and future research directions.