 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOverlapping Domain Decomposition for Distributed Pose Graph Optimization
Mar 03, 2026We present ROBO (Riemannian Overlapping Block Optimization), a distributed and parallel approach to multi-robot pose graph optimization (PGO) based on the idea of overlapping domain decomposition. ROBO offers a middle ground between centralized and fully distributed solvers, where the amount of pose information shared between robots at each optimization iteration can be set according to the available communication resources. Sharing additional pose information between neighboring robots effectively creates overlapping optimization blocks in the underlying pose graph, which substantially reduces the number of iterations required to converge. Through extensive experiments on benchmark PGO datasets, we demonstrate the applicability and feasibility of ROBO in different initialization scenarios, using various cost functions, and under different communication regimes. We also analyze the tradeoff between the increased communication and local computation required by ROBO's overlapping blocks and the resulting faster convergence. We show that overlaps with an average inter-robot data cost of only 36 Kb per iteration can converge 3.1$\times$ faster in terms of iterations than state-of-the-art distributed PGO approaches. Furthermore, we develop an asynchronous variant of ROBO that is robust to network delays and suitable for real-world robotic applications.
LatentAM: Real-Time, Large-Scale Latent Gaussian Attention Mapping via Online Dictionary Learning
Feb 12, 2026We present LatentAM, an online 3D Gaussian Splatting (3DGS) mapping framework that builds scalable latent feature maps from streaming RGB-D observations for open-vocabulary robotic perception. Instead of distilling high-dimensional Vision-Language Model (VLM) embeddings using model-specific decoders, LatentAM proposes an online dictionary learning approach that is both model-agnostic and pretraining-free, enabling plug-and-play integration with different VLMs at test time. Specifically, our approach associates each Gaussian primitive with a compact query vector that can be converted into approximate VLM embeddings using an attention mechanism with a learnable dictionary. The dictionary is initialized efficiently from streaming observations and optimized online to adapt to evolving scene semantics under trust-region regularization. To scale to long trajectories and large environments, we further propose an efficient map management strategy based on voxel hashing, where optimization is restricted to an active local map on the GPU, while the global map is stored and indexed on the CPU to maintain bounded GPU memory usage. Experiments on public benchmarks and a large-scale custom dataset demonstrate that LatentAM attains significantly better feature reconstruction fidelity compared to state-of-the-art methods, while achieving near-real-time speed (12-35 FPS) on the evaluated datasets. Our project page is at: https://junwoonlee.github.io/projects/LatentAM
Distribution Estimation for Global Data Association via Approximate Bayesian Inference
Sep 19, 2025



Global data association is an essential prerequisite for robot operation in environments seen at different times or by different robots. Repetitive or symmetric data creates significant challenges for existing methods, which typically rely on maximum likelihood estimation or maximum consensus to produce a single set of associations. However, in ambiguous scenarios, the distribution of solutions to global data association problems is often highly multimodal, and such single-solution approaches frequently fail. In this work, we introduce a data association framework that leverages approximate Bayesian inference to capture multiple solution modes to the data association problem, thereby avoiding premature commitment to a single solution under ambiguity. Our approach represents hypothetical solutions as particles that evolve according to a deterministic or randomized update rule to cover the modes of the underlying solution distribution. Furthermore, we show that our method can incorporate optimization constraints imposed by the data association formulation and directly benefit from GPU-parallelized optimization. Extensive simulated and real-world experiments with highly ambiguous data show that our method correctly estimates the distribution over transformations when registering point clouds or object maps.
MISO: Multiresolution Submap Optimization for Efficient Globally Consistent Neural Implicit Reconstruction
Apr 27, 2025



Neural implicit representations have had a significant impact on simultaneous localization and mapping (SLAM) by enabling robots to build continuous, differentiable, and high-fidelity 3D maps from sensor data. However, as the scale and complexity of the environment increase, neural SLAM approaches face renewed challenges in the back-end optimization process to keep up with runtime requirements and maintain global consistency. We introduce MISO, a hierarchical optimization approach that leverages multiresolution submaps to achieve efficient and scalable neural implicit reconstruction. For local SLAM within each submap, we develop a hierarchical optimization scheme with learned initialization that substantially reduces the time needed to optimize the implicit submap features. To correct estimation drift globally, we develop a hierarchical method to align and fuse the multiresolution submaps, leading to substantial acceleration by avoiding the need to decode the full scene geometry. MISO significantly improves computational efficiency and estimation accuracy of neural signed distance function (SDF) SLAM on large-scale real-world benchmarks.
Learning Scene-Level Signed Directional Distance Function with Ellipsoidal Priors and Neural Residuals
Mar 25, 2025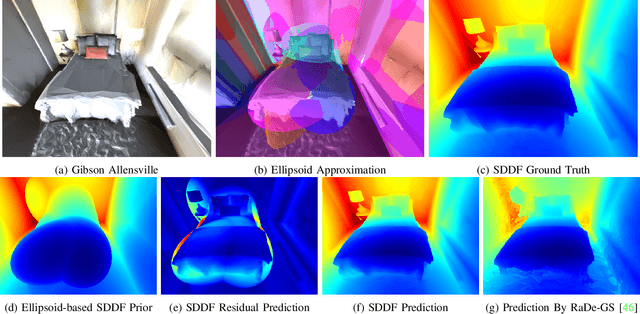
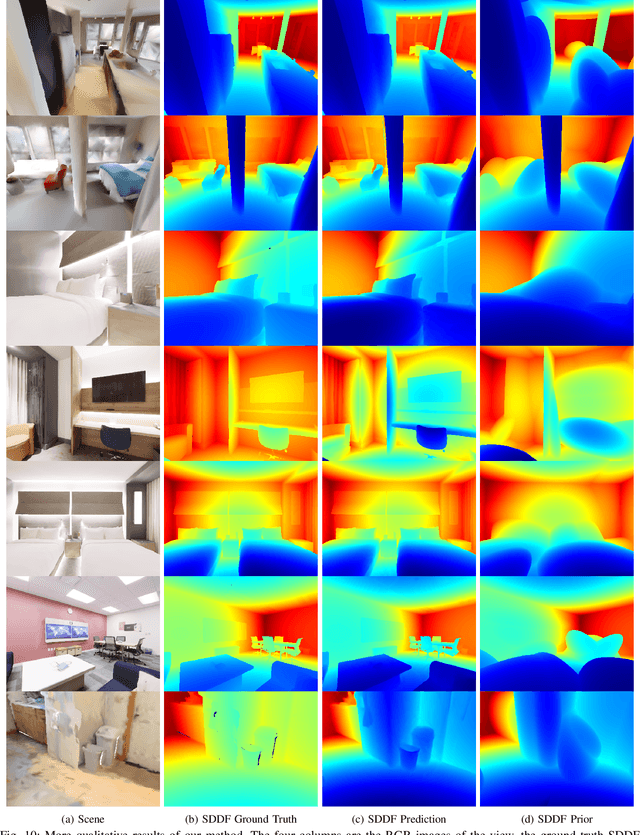

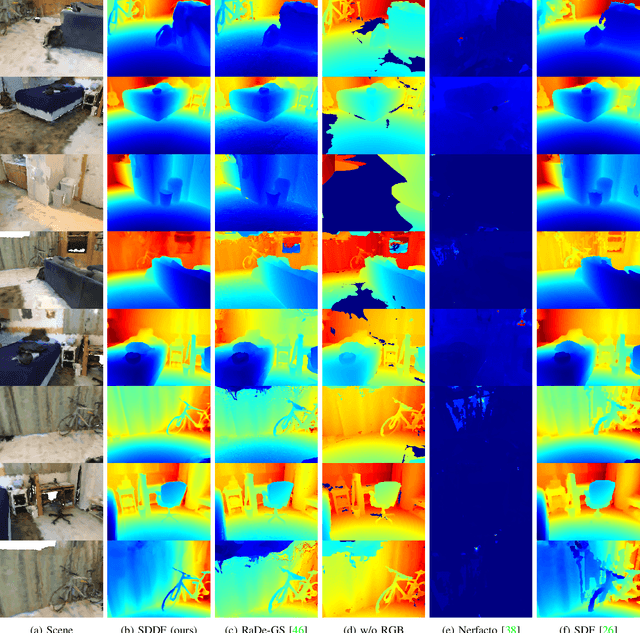
Dense geometric environment representations are critical for autonomous mobile robot navigation and exploration. Recent work shows that implicit continuous representations of occupancy, signed distance, or radiance learned using neural networks offer advantages in reconstruction fidelity, efficiency, and differentiability over explicit discrete representations based on meshes, point clouds, and voxels. In this work, we explore a directional formulation of signed distance, called signed directional distance function (SDDF). Unlike signed distance function (SDF) and similar to neural radiance fields (NeRF), SDDF has a position and viewing direction as input. Like SDF and unlike NeRF, SDDF directly provides distance to the observed surface along the direction, rather than integrating along the view ray, allowing efficient view synthesis. To learn and predict scene-level SDDF efficiently, we develop a differentiable hybrid representation that combines explicit ellipsoid priors and implicit neural residuals. This approach allows the model to effectively handle large distance discontinuities around obstacle boundaries while preserving the ability for dense high-fidelity prediction. We show that SDDF is competitive with the state-of-the-art neural implicit scene models in terms of reconstruction accuracy and rendering efficiency, while allowing differentiable view prediction for robot trajectory optimization.
ROMAN: Open-Set Object Map Alignment for Robust View-Invariant Global Localization
Oct 10, 2024



Global localization is a fundamental capability required for long-term and drift-free robot navigation. However, current methods fail to relocalize when faced with significantly different viewpoints. We present ROMAN (Robust Object Map Alignment Anywhere), a robust global localization method capable of localizing in challenging and diverse environments based on creating and aligning maps of open-set and view-invariant objects. To address localization difficulties caused by feature-sparse or perceptually aliased environments, ROMAN formulates and solves a registration problem between object submaps using a unified graph-theoretic global data association approach that simultaneously accounts for object shape and semantic similarities and a prior on gravity direction. Through a set of challenging large-scale multi-robot or multi-session SLAM experiments in indoor, urban and unstructured/forested environments, we demonstrate that ROMAN achieves a maximum recall 36% higher than other object-based map alignment methods and an absolute trajectory error that is 37% lower than using visual features for loop closures. Our project page can be found at https://acl.mit.edu/ROMAN/.
Resilient and Distributed Multi-Robot Visual SLAM: Datasets, Experiments, and Lessons Learned
Apr 10, 2023



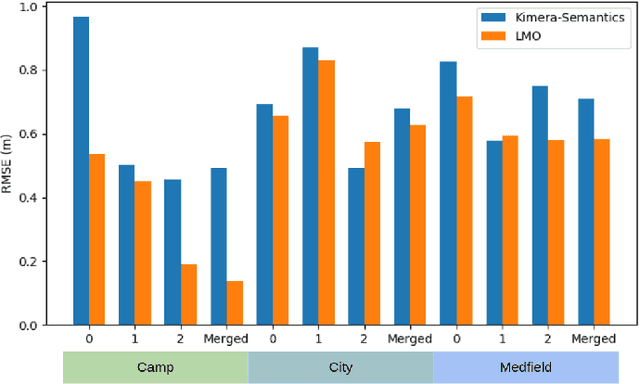
This paper revisits Kimera-Multi, a distributed multi-robot Simultaneous Localization and Mapping (SLAM) system, towards the goal of deployment in the real world. In particular, this paper has three main contributions. First, we describe improvements to Kimera-Multi to make it resilient to large-scale real-world deployments, with particular emphasis on handling intermittent and unreliable communication. Second, we collect and release challenging multi-robot benchmarking datasets obtained during live experiments conducted on the MIT campus, with accurate reference trajectories and maps for evaluation. The datasets include up to 8 robots traversing long distances (up to 8 km) and feature many challenging elements such as severe visual ambiguities (e.g., in underground tunnels and hallways), mixed indoor and outdoor trajectories with different lighting conditions, and dynamic entities (e.g., pedestrians and cars). Lastly, we evaluate the resilience of Kimera-Multi under different communication scenarios, and provide a quantitative comparison with a centralized baseline system. Based on the results from both live experiments and subsequent analysis, we discuss the strengths and weaknesses of Kimera-Multi, and suggest future directions for both algorithm and system design. We release the source code of Kimera-Multi and all datasets to facilitate further research towards the reliable real-world deployment of multi-robot SLAM systems.
Spectral Sparsification for Communication-Efficient Collaborative Rotation and Translation Estimation
Oct 10, 2022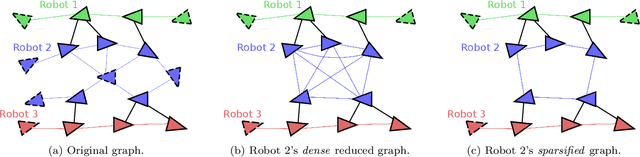
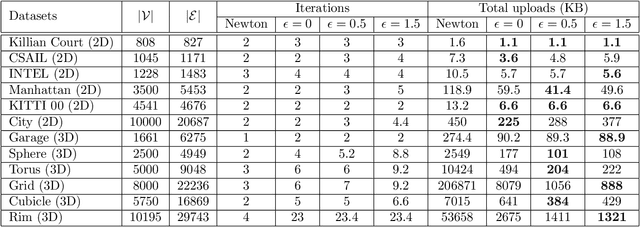
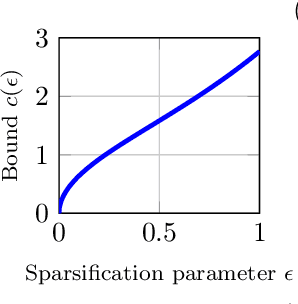
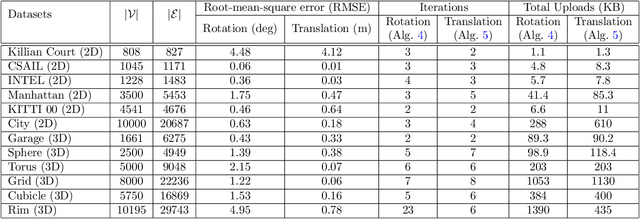
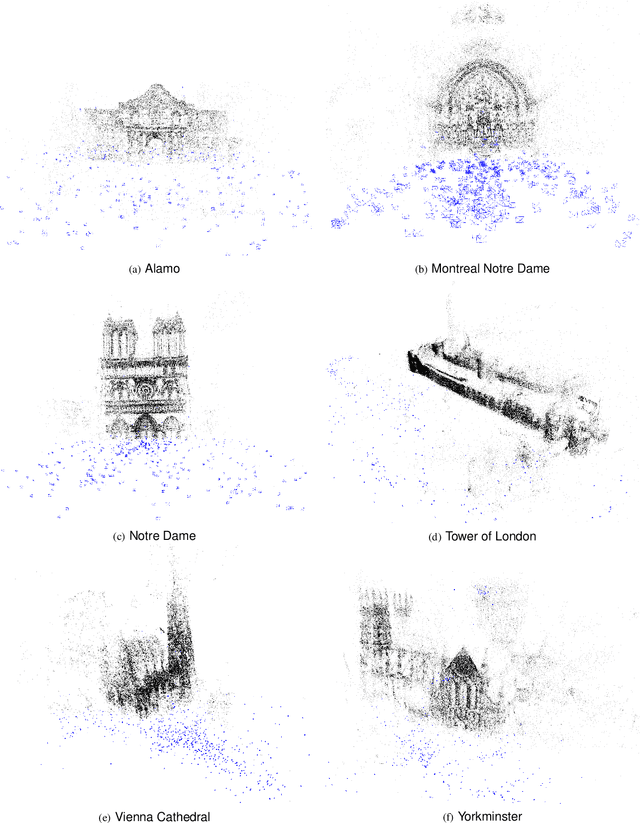
We propose fast and communication-efficient distributed algorithms for rotation averaging and translation recovery problems that arise from multi-robot simultaneous localization and mapping (SLAM) and distributed camera network localization applications. Our methods are based on theoretical relations between the Hessians of the underlying Riemannian optimization problems and the Laplacians of suitably weighted graphs. We leverage these results to design a distributed solver that performs approximate second-order optimization by solving a Laplacian system at each iteration. Crucially, our algorithms permit robots to employ spectral sparsification to sparsify intermediate dense matrices before communication, and hence provide a mechanism to trade off accuracy with communication efficiency with provable guarantees. We perform rigorous theoretical analysis of our methods and prove that they enjoy (local) linear rate of convergence on the problems of interest. Numerical experiments show that the proposed methods converge to high-precision solutions in a few iterations and that they are significantly more communication-efficient compared to baseline second-order solvers.
Distributed Riemannian Optimization with Lazy Communication for Collaborative Geometric Estimation
Mar 02, 2022

We present the first distributed optimization algorithm with lazy communication for collaborative geometric estimation, the backbone of modern collaborative simultaneous localization and mapping (SLAM) and structure-from-motion (SfM) applications. Our method allows agents to cooperatively reconstruct a shared geometric model on a central server by fusing individual observations, but without the need to transmit potentially sensitive information about the agents themselves (such as their locations). Furthermore, to alleviate the burden of communication during iterative optimization, we design a set of communication triggering conditions that enable agents to selectively upload local information that are useful to global optimization. Our approach thus achieves significant communication reduction with minimal impact on optimization performance. As our main theoretical contribution, we prove that our method converges to first-order critical points with a sublinear convergence rate. Numerical evaluations on bundle adjustment problems from collaborative SLAM and SfM datasets show that our method performs competitively against existing distributed techniques, while achieving up to 78% total communication reduction.
Kimera-Multi: Robust, Distributed, Dense Metric-Semantic SLAM for Multi-Robot Systems
Jun 28, 2021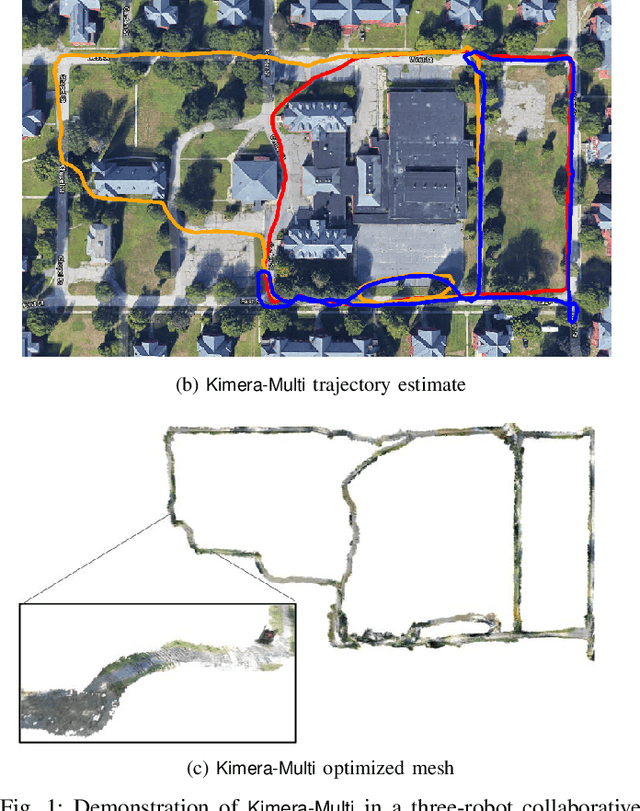
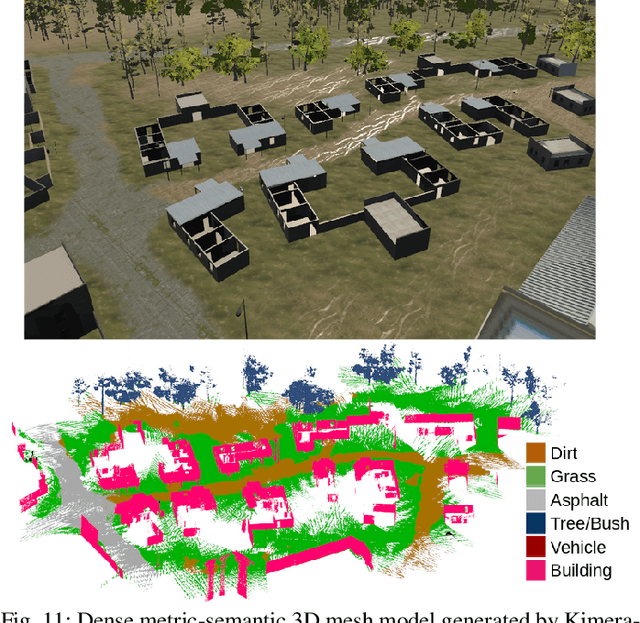
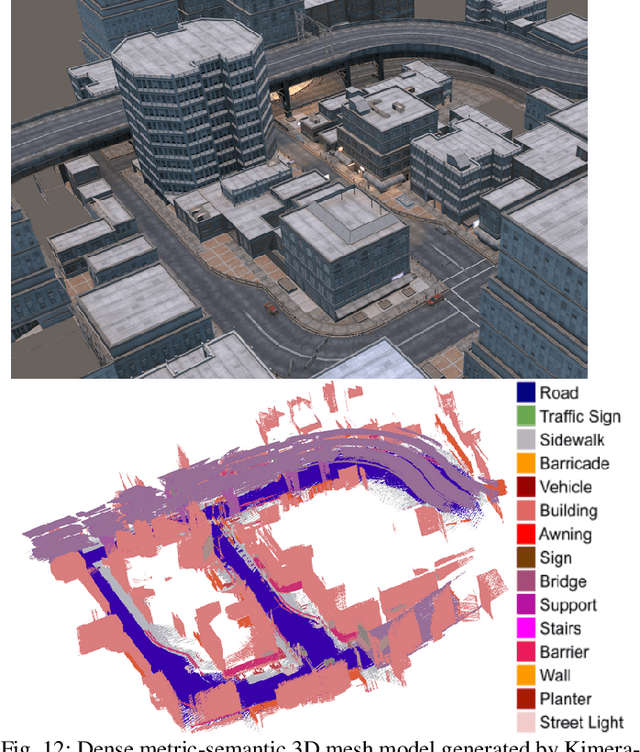
This paper presents Kimera-Multi, the first multi-robot system that (i) is robust and capable of identifying and rejecting incorrect inter and intra-robot loop closures resulting from perceptual aliasing, (ii) is fully distributed and only relies on local (peer-to-peer) communication to achieve distributed localization and mapping, and (iii) builds a globally consistent metric-semantic 3D mesh model of the environment in real-time, where faces of the mesh are annotated with semantic labels. Kimera-Multi is implemented by a team of robots equipped with visual-inertial sensors. Each robot builds a local trajectory estimate and a local mesh using Kimera. When communication is available, robots initiate a distributed place recognition and robust pose graph optimization protocol based on a novel distributed graduated non-convexity algorithm. The proposed protocol allows the robots to improve their local trajectory estimates by leveraging inter-robot loop closures while being robust to outliers. Finally, each robot uses its improved trajectory estimate to correct the local mesh using mesh deformation techniques. We demonstrate Kimera-Multi in photo-realistic simulations, SLAM benchmarking datasets, and challenging outdoor datasets collected using ground robots. Both real and simulated experiments involve long trajectories (e.g., up to 800 meters per robot). The experiments show that Kimera-Multi (i) outperforms the state of the art in terms of robustness and accuracy, (ii) achieves estimation errors comparable to a centralized SLAM system while being fully distributed, (iii) is parsimonious in terms of communication bandwidth, (iv) produces accurate metric-semantic 3D meshes, and (v) is modular and can be also used for standard 3D reconstruction (i.e., without semantic labels) or for trajectory estimation (i.e., without reconstructing a 3D mesh).