 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConstraint-Preserving Data Generation for Visuomotor Policy Learning
Aug 05, 2025



Large-scale demonstration data has powered key breakthroughs in robot manipulation, but collecting that data remains costly and time-consuming. We present Constraint-Preserving Data Generation (CP-Gen), a method that uses a single expert trajectory to generate robot demonstrations containing novel object geometries and poses. These generated demonstrations are used to train closed-loop visuomotor policies that transfer zero-shot to the real world and generalize across variations in object geometries and poses. Similar to prior work using pose variations for data generation, CP-Gen first decomposes expert demonstrations into free-space motions and robot skills. But unlike those works, we achieve geometry-aware data generation by formulating robot skills as keypoint-trajectory constraints: keypoints on the robot or grasped object must track a reference trajectory defined relative to a task-relevant object. To generate a new demonstration, CP-Gen samples pose and geometry transforms for each task-relevant object, then applies these transforms to the object and its associated keypoints or keypoint trajectories. We optimize robot joint configurations so that the keypoints on the robot or grasped object track the transformed keypoint trajectory, and then motion plan a collision-free path to the first optimized joint configuration. Experiments on 16 simulation tasks and four real-world tasks, featuring multi-stage, non-prehensile and tight-tolerance manipulation, show that policies trained using CP-Gen achieve an average success rate of 77%, outperforming the best baseline that achieves an average of 50%.
TidyBot++: An Open-Source Holonomic Mobile Manipulator for Robot Learning
Dec 11, 2024



Exploiting the promise of recent advances in imitation learning for mobile manipulation will require the collection of large numbers of human-guided demonstrations. This paper proposes an open-source design for an inexpensive, robust, and flexible mobile manipulator that can support arbitrary arms, enabling a wide range of real-world household mobile manipulation tasks. Crucially, our design uses powered casters to enable the mobile base to be fully holonomic, able to control all planar degrees of freedom independently and simultaneously. This feature makes the base more maneuverable and simplifies many mobile manipulation tasks, eliminating the kinematic constraints that create complex and time-consuming motions in nonholonomic bases. We equip our robot with an intuitive mobile phone teleoperation interface to enable easy data acquisition for imitation learning. In our experiments, we use this interface to collect data and show that the resulting learned policies can successfully perform a variety of common household mobile manipulation tasks.
Consistency Policy: Accelerated Visuomotor Policies via Consistency Distillation
May 13, 2024



Many robotic systems, such as mobile manipulators or quadrotors, cannot be equipped with high-end GPUs due to space, weight, and power constraints. These constraints prevent these systems from leveraging recent developments in visuomotor policy architectures that require high-end GPUs to achieve fast policy inference. In this paper, we propose Consistency Policy, a faster and similarly powerful alternative to Diffusion Policy for learning visuomotor robot control. By virtue of its fast inference speed, Consistency Policy can enable low latency decision making in resource-constrained robotic setups. A Consistency Policy is distilled from a pretrained Diffusion Policy by enforcing self-consistency along the Diffusion Policy's learned trajectories. We compare Consistency Policy with Diffusion Policy and other related speed-up methods across 6 simulation tasks as well as two real-world tasks where we demonstrate inference on a laptop GPU. For all these tasks, Consistency Policy speeds up inference by an order of magnitude compared to the fastest alternative method and maintains competitive success rates. We also show that the Conistency Policy training procedure is robust to the pretrained Diffusion Policy's quality, a useful result that helps practioners avoid extensive testing of the pretrained model. Key design decisions that enabled this performance are the choice of consistency objective, reduced initial sample variance, and the choice of preset chaining steps. Code and training details will be released publicly.
A two-step machine learning approach for crop disease detection: an application of GAN and UAV technology
Sep 19, 2021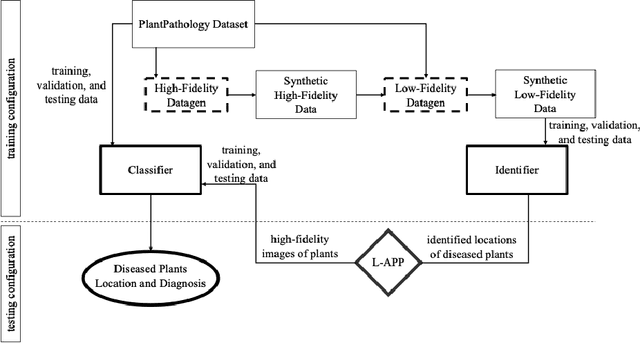
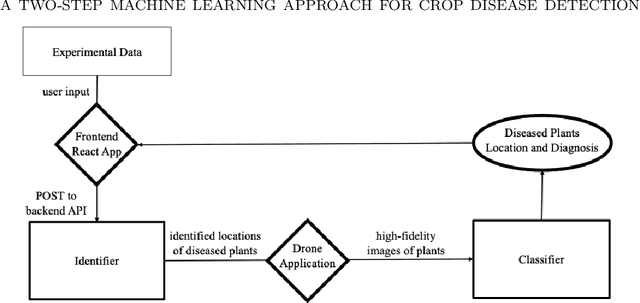
Automated plant diagnosis is a technology that promises large increases in cost-efficiency for agriculture. However, multiple problems reduce the effectiveness of drones, including the inverse relationship between resolution and speed and the lack of adequate labeled training data. This paper presents a two-step machine learning approach that analyzes low-fidelity and high-fidelity images in sequence, preserving efficiency as well as accuracy. Two data-generators are also used to minimize class imbalance in the high-fidelity dataset and to produce low-fidelity data that is representative of UAV images. The analysis of applications and methods is conducted on a database of high-fidelity apple tree images which are corrupted with class imbalance. The application begins by generating high-fidelity data using generative networks and then uses this novel data alongside the original high-fidelity data to produce low-fidelity images. A machine-learning identifier identifies plants and labels them as potentially diseased or not. A machine learning classifier is then given the potentially diseased plant images and returns actual diagnoses for these plants. The results show an accuracy of 96.3% for the high-fidelity system and a 75.5% confidence level for our low-fidelity system. Our drone technology shows promising results in accuracy when compared to labor-based methods of diagnosis.