 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHyperTool: Beyond Step-Wise Tool Calls for Tool-Augmented Agents
Jun 11, 2026Tool-augmented LLM agents commonly rely on step-wise atomic tool calls, where each invocation, observation, and value transfer is exposed in the main reasoning trace. This creates an \emph{execution-granularity mismatch}: locally deterministic tool workflows are unfolded into repeated model-visible decisions, consuming context and forcing the model to manage low-level dataflow in the trace. We introduce \textbf{HyperTool}, a unified executable MCP-style tool interface that changes the model-visible unit of tool execution. A model invokes HyperTool with a code block that can call existing tools through their original schemas, manipulate returned values, and pass intermediate results locally, folding deterministic tool subroutines into a single outer call. To train models to use this interface, we synthesize HyperTool-format trajectories from cross-tool compositional tasks and verify them in real MCP environments. On MCP-Universe, HyperTool improves average accuracy from 15.69\% to 35.29\% on Qwen3-32B and from 9.93\% to 33.33\% on Qwen3-8B, and surpass GPT-OSS and Kimi-k2.5 on average accuracy, showing that our HyperTool can substantially improve multi-step tool use.
LongSeeker: Elastic Context Orchestration for Long-Horizon Search Agents
May 06, 2026Long-horizon search agents must manage a rapidly growing working context as they reason, call tools, and observe information. Naively accumulating all intermediate content can overwhelm the agent, increasing costs and the risk of errors. We propose that effective context management should be adaptive: parts of the agent's trajectory are maintained at different levels of detail depending on their current relevance to the task. To operationalize this principle, we introduce Context-ReAct, a general agentic paradigm for elastic context orchestration that integrates reasoning, context management, and tool use in a unified loop. Context-ReAct provides five atomic operations: Skip, Compress, Rollback, Snippet and Delete, which allow the agent to dynamically reshape its working context, preserving important evidence, summarizing resolved information, discarding unhelpful branches, and controlling context size. We prove that the Compress operator is expressively complete, while the other specialized operators provide efficiency and fidelity guarantees that reduce generation cost and hallucination risk. Building on this paradigm, we develop LongSeeker, a long-horizon search agent fine-tuned from Qwen3-30B-A3B on 10k synthesized trajectories. Across four representative search benchmarks, LongSeeker achieves 61.5% on BrowseComp and 62.5% on BrowseComp-ZH, substantially outperforming Tongyi DeepResearch (43.2% and 46.7%) and AgentFold (36.2% and 47.3%). These results highlight the potential of adaptive context management, showing that agents can achieve more reliable and efficient long-horizon reasoning by actively shaping their working memory.
LoViF 2026 Challenge on Human-oriented Semantic Image Quality Assessment: Methods and Results
Apr 13, 2026This paper reviews the LoViF 2026 Challenge on Human-oriented Semantic Image Quality Assessment. This challenge aims to raise a new direction, i.e., how to evaluate the loss of semantic information from the human perspective, intending to promote the development of some new directions, like semantic coding, processing, and semantic-oriented optimization, etc. Unlike existing datasets of quality assessment, we form a dataset of human-oriented semantic quality assessment, termed the SeIQA dataset. This dataset is divided into three parts for this competition: (i) training data: 510 pairs of degraded images and their corresponding ground truth references; (ii) validation data: 80 pairs of degraded images and their corresponding ground-truth references; (iii) testing data: 160 pairs of degraded images and their corresponding ground-truth references. The primary objective of this challenge is to establish a new and powerful benchmark for human-oriented semantic image quality assessment. There are a total of 58 teams registered in this competition, and 6 teams submitted valid solutions and fact sheets for the final testing phase. These submissions achieved state-of-the-art (SOTA) performance on the SeIQA dataset.
MIST-RL: Mutation-based Incremental Suite Testing via Reinforcement Learning
Mar 02, 2026Large Language Models (LLMs) often fail to generate correct code on the first attempt, which requires using generated unit tests as verifiers to validate the solutions. Despite the success of recent verification methods, they remain constrained by a "scaling-by-quantity" paradigm. This brute-force approach suffers from a critical limitation: it yields diminishing returns in fault detection while causing severe test redundancy. To address this, we propose MIST-RL (Mutation-based Incremental Suite Testing via Reinforcement Learning), a framework that shifts the focus to "scaling-by-utility". We formulate test generation as a sequential decision process optimized via Group Relative Policy Optimization (GRPO). Specifically, we introduce a novel incremental mutation reward combined with dynamic penalties, which incentivizes the model to discover new faults while it suppresses functionally equivalent assertions. Experiments on HumanEval+ and MBPP+ demonstrate that MIST-RL outperforms state-of-the-art baselines. It achieves a +28.5% higher mutation score while reducing the number of test cases by 19.3%. Furthermore, we show that these compact, high-utility tests serve as superior verifiers, which improves downstream code reranking accuracy on HumanEval+ by 3.05% over the SOTA baseline with 10 candidate samples. The source code and data are provided in the supplementary material.
Mono4DEditor: Text-Driven 4D Scene Editing from Monocular Video via Point-Level Localization of Language-Embedded Gaussians
Oct 10, 2025



Editing 4D scenes reconstructed from monocular videos based on text prompts is a valuable yet challenging task with broad applications in content creation and virtual environments. The key difficulty lies in achieving semantically precise edits in localized regions of complex, dynamic scenes, while preserving the integrity of unedited content. To address this, we introduce Mono4DEditor, a novel framework for flexible and accurate text-driven 4D scene editing. Our method augments 3D Gaussians with quantized CLIP features to form a language-embedded dynamic representation, enabling efficient semantic querying of arbitrary spatial regions. We further propose a two-stage point-level localization strategy that first selects candidate Gaussians via CLIP similarity and then refines their spatial extent to improve accuracy. Finally, targeted edits are performed on localized regions using a diffusion-based video editing model, with flow and scribble guidance ensuring spatial fidelity and temporal coherence. Extensive experiments demonstrate that Mono4DEditor enables high-quality, text-driven edits across diverse scenes and object types, while preserving the appearance and geometry of unedited areas and surpassing prior approaches in both flexibility and visual fidelity.
Benchmarking and Enhancing LLM Agents in Localizing Linux Kernel Bugs
May 26, 2025The Linux kernel is a critical system, serving as the foundation for numerous systems. Bugs in the Linux kernel can cause serious consequences, affecting billions of users. Fault localization (FL), which aims at identifying the buggy code elements in software, plays an essential role in software quality assurance. While recent LLM agents have achieved promising accuracy in FL on recent benchmarks like SWE-bench, it remains unclear how well these methods perform in the Linux kernel, where FL is much more challenging due to the large-scale code base, limited observability, and diverse impact factors. In this paper, we introduce LinuxFLBench, a FL benchmark constructed from real-world Linux kernel bugs. We conduct an empirical study to assess the performance of state-of-the-art LLM agents on the Linux kernel. Our initial results reveal that existing agents struggle with this task, achieving a best top-1 accuracy of only 41.6% at file level. To address this challenge, we propose LinuxFL$^+$, an enhancement framework designed to improve FL effectiveness of LLM agents for the Linux kernel. LinuxFL$^+$ substantially improves the FL accuracy of all studied agents (e.g., 7.2% - 11.2% accuracy increase) with minimal costs. Data and code are available at https://github.com/FudanSELab/LinuxFLBench.
Multi-modal Evidential Fusion Network for Trusted PET/CT Tumor Segmentation
Jun 26, 2024Accurate segmentation of tumors in PET/CT images is important in computer-aided diagnosis and treatment of cancer. The key issue of such a segmentation problem lies in the effective integration of complementary information from PET and CT images. However, the quality of PET and CT images varies widely in clinical settings, which leads to uncertainty in the modality information extracted by networks. To take the uncertainty into account in multi-modal information fusion, this paper proposes a novel Multi-modal Evidential Fusion Network (MEFN) comprising a Cross-Modal Feature Learning (CFL) module and a Multi-modal Trusted Fusion (MTF) module. The CFL module reduces the domain gap upon modality conversion and highlights common tumor features, thereby alleviating the needs of the segmentation module to handle modality specificity. The MTF module utilizes mutual attention mechanisms and an uncertainty calibrator to fuse modality features based on modality uncertainty and then fuse the segmentation results under the guidance of Dempster-Shafer Theory. Besides, a new uncertainty perceptual loss is introduced to force the model focusing on uncertain features and hence improve its ability to extract trusted modality information. Extensive comparative experiments are conducted on two publicly available PET/CT datasets to evaluate the performance of our proposed method whose results demonstrate that our MEFN significantly outperforms state-of-the-art methods with improvements of 2.15% and 3.23% in DSC scores on the AutoPET dataset and the Hecktor dataset, respectively. More importantly, our model can provide radiologists with credible uncertainty of the segmentation results for their decision in accepting or rejecting the automatic segmentation results, which is particularly important for clinical applications. Our code will be available at https://github.com/QPaws/MEFN.
Stable-Pose: Leveraging Transformers for Pose-Guided Text-to-Image Generation
Jun 04, 2024



Controllable text-to-image (T2I) diffusion models have shown impressive performance in generating high-quality visual content through the incorporation of various conditions. Current methods, however, exhibit limited performance when guided by skeleton human poses, especially in complex pose conditions such as side or rear perspectives of human figures. To address this issue, we present Stable-Pose, a novel adapter model that introduces a coarse-to-fine attention masking strategy into a vision Transformer (ViT) to gain accurate pose guidance for T2I models. Stable-Pose is designed to adeptly handle pose conditions within pre-trained Stable Diffusion, providing a refined and efficient way of aligning pose representation during image synthesis. We leverage the query-key self-attention mechanism of ViTs to explore the interconnections among different anatomical parts in human pose skeletons. Masked pose images are used to smoothly refine the attention maps based on target pose-related features in a hierarchical manner, transitioning from coarse to fine levels. Additionally, our loss function is formulated to allocate increased emphasis to the pose region, thereby augmenting the model's precision in capturing intricate pose details. We assessed the performance of Stable-Pose across five public datasets under a wide range of indoor and outdoor human pose scenarios. Stable-Pose achieved an AP score of 57.1 in the LAION-Human dataset, marking around 13% improvement over the established technique ControlNet. The project link and code is available at https://github.com/ai-med/StablePose.
Energy-Efficient Routing Protocol Based on Multi-Threshold Segmentation in Wireless Sensors Networks for Precision Agriculture
Jul 03, 2023



Wireless sensor networks (WSNs), one of the fundamental technologies of the Internet of Things (IoT), can provide sensing and communication services efficiently for IoT-based applications, especially energy-limited applications. Clustering routing protocol plays an important role in reducing energy consumption and prolonging network lifetime. The cluster formation and cluster head selection are the key to improving the performance of the clustering routing protocol. An energy-efficient routing protocol based on multi-threshold segmentation (EERPMS) was proposed in this paper to improve the rationality of cluster formation and cluster head selection. In the stage of cluster formation, inspired by multi-threshold image segmentation, an innovative node clustering algorithm was developed. In the stage of cluster head selection, aiming at minimizing the network energy consumption, a calculation theory of the optimal number and location of cluster heads was established. Furthermore, a novel cluster head selection algorithm was constructed based on the residual energy and optimal location of cluster heads. Simulation results show that EERPMS can improve the distribution uniformity of cluster heads, prolong the network lifetime and save up to 64.50%, 58.60%, and 56.15% network energy as compared to RLEACH, CRPFCM, and FIGWO protocols respectively.
* 16 pages, 24 figure, 4 tables
Recursive Hierarchical Projection for Whole-Body Control with Task Priority Transition
Sep 22, 2021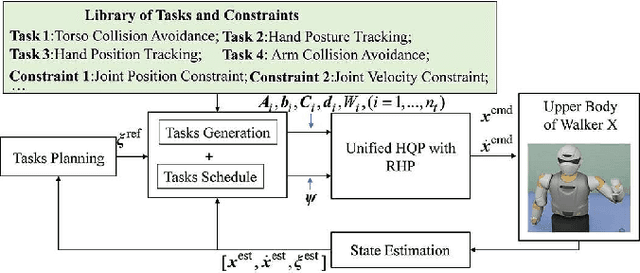
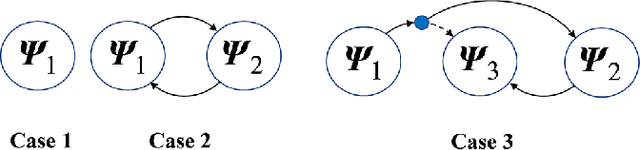
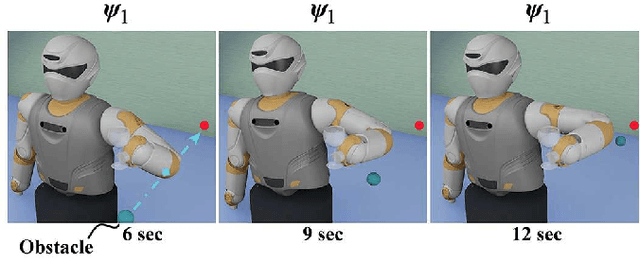
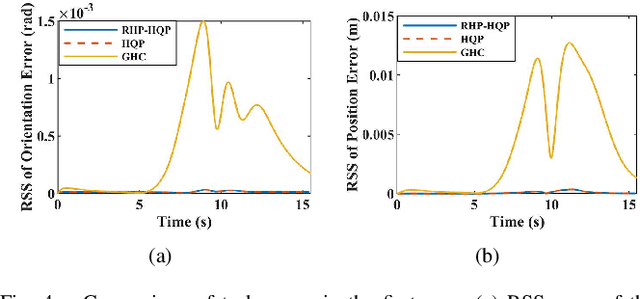
Redundant robots are desired to execute multitasks with different priorities simultaneously. The task priorities are necessary to be transitioned for complex task scheduling of whole-body control (WBC). Many methods focused on guaranteeing the control continuity during task priority transition, however either increased the computation consumption or sacrificed the accuracy of tasks inevitably. This work formulates the WBC problem with task priority transition as an Hierarchical Quadratic Programming (HQP) with Recursive Hierarchical Projection (RHP) matrices. The tasks of each level are solved recursively through HQP. We propose the RHP matrix to form the continuously changing projection of each level so that the task priority transition is achieved without increasing computation consumption. Additionally, the recursive approach solves the WBC problem without losing the accuracy of tasks. We verify the effectiveness of this scheme by the comparative simulations of the reactive collision avoidance through multi-tasks priority transitions.