 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeREAL: Benchmarking Autonomous Agents on Deterministic Simulations of Real Websites
Apr 15, 2025



We introduce REAL, a benchmark and framework for multi-turn agent evaluations on deterministic simulations of real-world websites. REAL comprises high-fidelity, deterministic replicas of 11 widely-used websites across domains such as e-commerce, travel, communication, and professional networking. We also release a benchmark consisting of 112 practical tasks that mirror everyday complex user interactions requiring both accurate information retrieval and state-changing actions. All interactions occur within this fully controlled setting, eliminating safety risks and enabling robust, reproducible evaluation of agent capability and reliability. Our novel evaluation framework combines programmatic checks of website state for action-based tasks with rubric-guided LLM-based judgments for information retrieval. The framework supports both open-source and proprietary agent systems through a flexible evaluation harness that accommodates black-box commands within browser environments, allowing research labs to test agentic systems without modification. Our empirical results show that frontier language models achieve at most a 41% success rate on REAL, highlighting critical gaps in autonomous web navigation and task completion capabilities. Our framework supports easy integration of new tasks, reproducible evaluation, and scalable data generation for training web agents. The websites, framework, and leaderboard are available at https://realevals.xyz and https://github.com/agi-inc/REAL.
Agent Q: Advanced Reasoning and Learning for Autonomous AI Agents
Aug 13, 2024Large Language Models (LLMs) have shown remarkable capabilities in natural language tasks requiring complex reasoning, yet their application in agentic, multi-step reasoning within interactive environments remains a difficult challenge. Traditional supervised pre-training on static datasets falls short in enabling autonomous agent capabilities needed to perform complex decision-making in dynamic settings like web navigation. Previous attempts to bridge this ga-through supervised fine-tuning on curated expert demonstrations-often suffer from compounding errors and limited exploration data, resulting in sub-optimal policy outcomes. To overcome these challenges, we propose a framework that combines guided Monte Carlo Tree Search (MCTS) search with a self-critique mechanism and iterative fine-tuning on agent interactions using an off-policy variant of the Direct Preference Optimization (DPO) algorithm. Our method allows LLM agents to learn effectively from both successful and unsuccessful trajectories, thereby improving their generalization in complex, multi-step reasoning tasks. We validate our approach in the WebShop environment-a simulated e-commerce platform where it consistently outperforms behavior cloning and reinforced fine-tuning baseline, and beats average human performance when equipped with the capability to do online search. In real-world booking scenarios, our methodology boosts Llama-3 70B model's zero-shot performance from 18.6% to 81.7% success rate (a 340% relative increase) after a single day of data collection and further to 95.4% with online search. We believe this represents a substantial leap forward in the capabilities of autonomous agents, paving the way for more sophisticated and reliable decision-making in real-world settings.
ROER: Regularized Optimal Experience Replay
Jul 04, 2024



Experience replay serves as a key component in the success of online reinforcement learning (RL). Prioritized experience replay (PER) reweights experiences by the temporal difference (TD) error empirically enhancing the performance. However, few works have explored the motivation of using TD error. In this work, we provide an alternative perspective on TD-error-based reweighting. We show the connections between the experience prioritization and occupancy optimization. By using a regularized RL objective with $f-$divergence regularizer and employing its dual form, we show that an optimal solution to the objective is obtained by shifting the distribution of off-policy data in the replay buffer towards the on-policy optimal distribution using TD-error-based occupancy ratios. Our derivation results in a new pipeline of TD error prioritization. We specifically explore the KL divergence as the regularizer and obtain a new form of prioritization scheme, the regularized optimal experience replay (ROER). We evaluate the proposed prioritization scheme with the Soft Actor-Critic (SAC) algorithm in continuous control MuJoCo and DM Control benchmark tasks where our proposed scheme outperforms baselines in 6 out of 11 tasks while the results of the rest match with or do not deviate far from the baselines. Further, using pretraining, ROER achieves noticeable improvement on difficult Antmaze environment where baselines fail, showing applicability to offline-to-online fine-tuning. Code is available at \url{https://github.com/XavierChanglingLi/Regularized-Optimal-Experience-Replay}.
Learning to Detect Touches on Cluttered Tables
Apr 10, 2023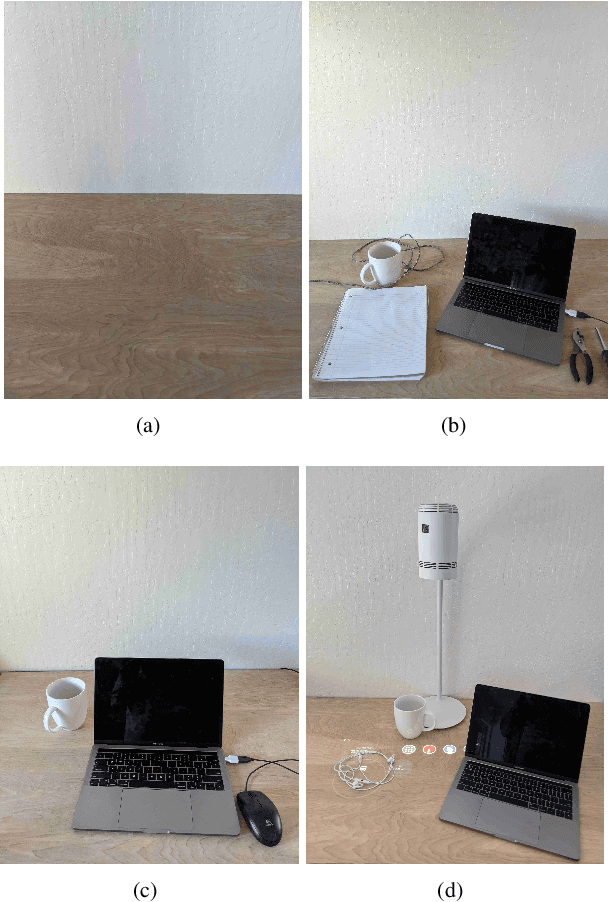
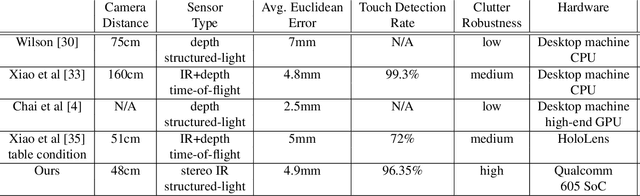

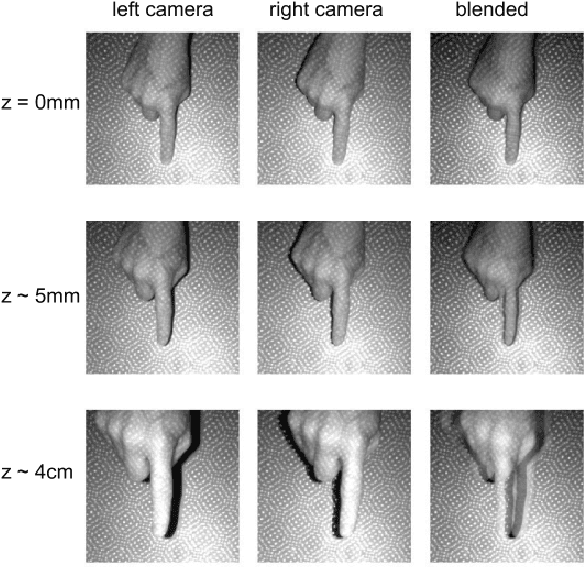
We present a novel self-contained camera-projector tabletop system with a lamp form-factor that brings digital intelligence to our tables. We propose a real-time, on-device, learning-based touch detection algorithm that makes any tabletop interactive. The top-down configuration and learning-based algorithm makes our method robust to the presence of clutter, a main limitation of existing camera-projector tabletop systems. Our research prototype enables a set of experiences that combine hand interactions and objects present on the table. A video can be found at https://youtu.be/hElC_c25Fg8.
Extreme Q-Learning: MaxEnt RL without Entropy
Jan 05, 2023Modern Deep Reinforcement Learning (RL) algorithms require estimates of the maximal Q-value, which are difficult to compute in continuous domains with an infinite number of possible actions. In this work, we introduce a new update rule for online and offline RL which directly models the maximal value using Extreme Value Theory (EVT), drawing inspiration from Economics. By doing so, we avoid computing Q-values using out-of-distribution actions which is often a substantial source of error. Our key insight is to introduce an objective that directly estimates the optimal soft-value functions (LogSumExp) in the maximum entropy RL setting without needing to sample from a policy. Using EVT, we derive our Extreme Q-Learning framework and consequently online and, for the first time, offline MaxEnt Q-learning algorithms, that do not explicitly require access to a policy or its entropy. Our method obtains consistently strong performance in the D4RL benchmark, outperforming prior works by 10+ points on some tasks while offering moderate improvements over SAC and TD3 on online DM Control tasks.
Retrospective on the 2021 BASALT Competition on Learning from Human Feedback
Apr 14, 2022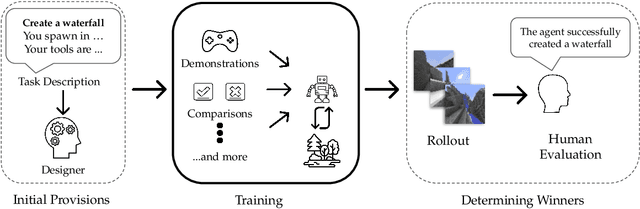
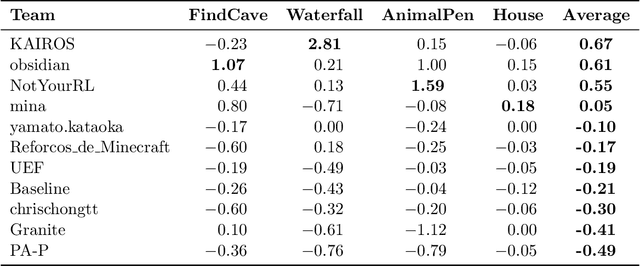
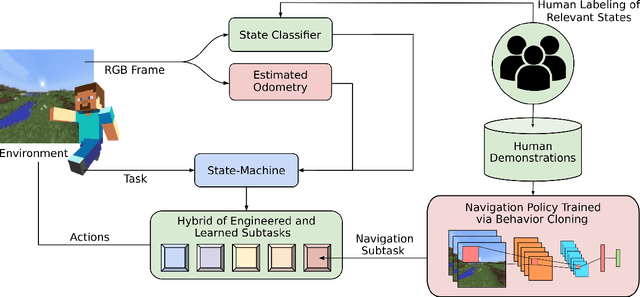
We held the first-ever MineRL Benchmark for Agents that Solve Almost-Lifelike Tasks (MineRL BASALT) Competition at the Thirty-fifth Conference on Neural Information Processing Systems (NeurIPS 2021). The goal of the competition was to promote research towards agents that use learning from human feedback (LfHF) techniques to solve open-world tasks. Rather than mandating the use of LfHF techniques, we described four tasks in natural language to be accomplished in the video game Minecraft, and allowed participants to use any approach they wanted to build agents that could accomplish the tasks. Teams developed a diverse range of LfHF algorithms across a variety of possible human feedback types. The three winning teams implemented significantly different approaches while achieving similar performance. Interestingly, their approaches performed well on different tasks, validating our choice of tasks to include in the competition. While the outcomes validated the design of our competition, we did not get as many participants and submissions as our sister competition, MineRL Diamond. We speculate about the causes of this problem and suggest improvements for future iterations of the competition.
LISA: Learning Interpretable Skill Abstractions from Language
Feb 28, 2022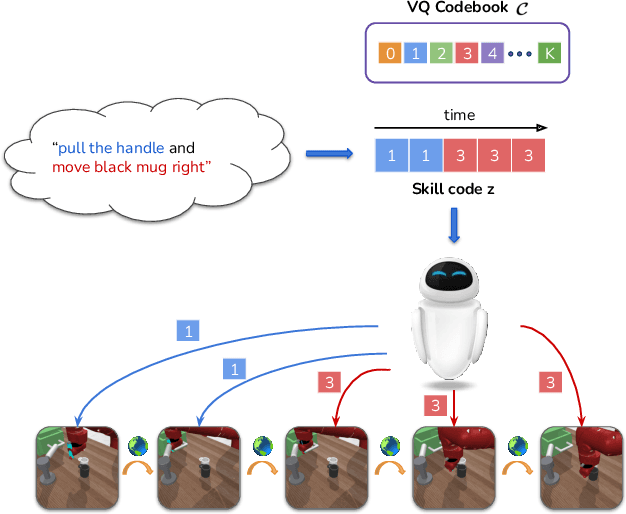
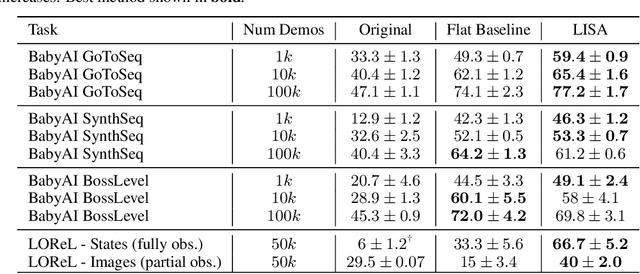
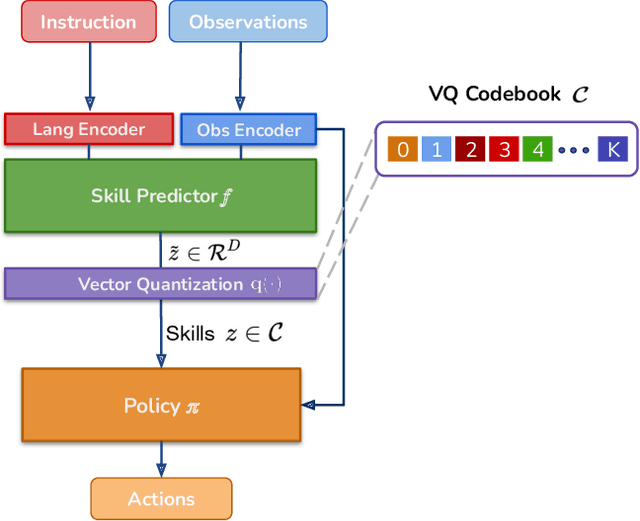
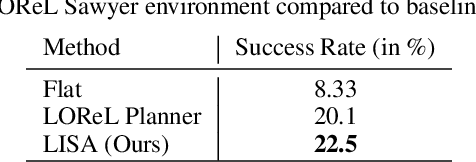
Learning policies that effectually utilize language instructions in complex, multi-task environments is an important problem in imitation learning. While it is possible to condition on the entire language instruction directly, such an approach could suffer from generalization issues. To encode complex instructions into skills that can generalize to unseen instructions, we propose Learning Interpretable Skill Abstractions (LISA), a hierarchical imitation learning framework that can learn diverse, interpretable skills from language-conditioned demonstrations. LISA uses vector quantization to learn discrete skill codes that are highly correlated with language instructions and the behavior of the learned policy. In navigation and robotic manipulation environments, LISA is able to outperform a strong non-hierarchical baseline in the low data regime and compose learned skills to solve tasks containing unseen long-range instructions. Our method demonstrates a more natural way to condition on language in sequential decision-making problems and achieve interpretable and controllable behavior with the learned skills.
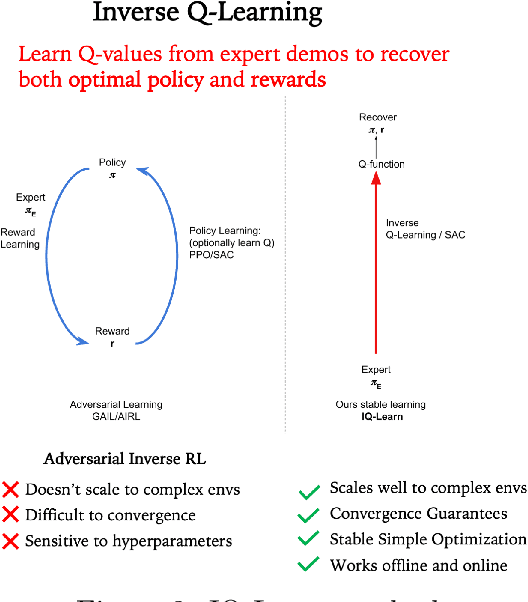
IQ-Learn: Inverse soft-Q Learning for Imitation
Jun 23, 2021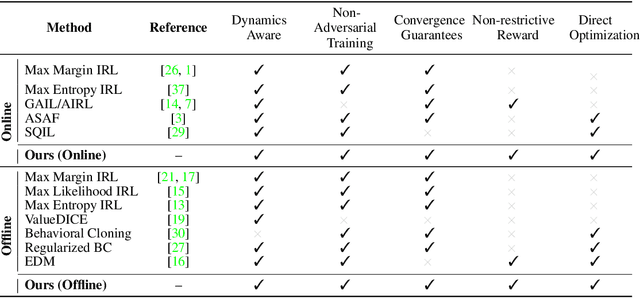
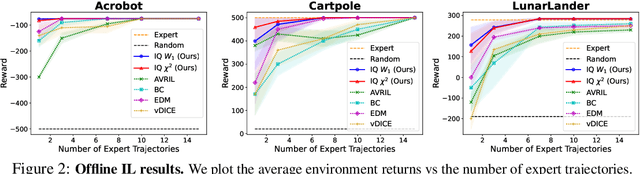
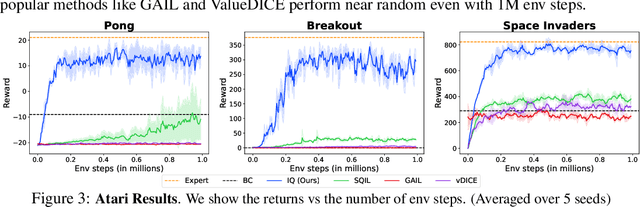
In many sequential decision-making problems (e.g., robotics control, game playing, sequential prediction), human or expert data is available containing useful information about the task. However, imitation learning (IL) from a small amount of expert data can be challenging in high-dimensional environments with complex dynamics. Behavioral cloning is a simple method that is widely used due to its simplicity of implementation and stable convergence but doesn't utilize any information involving the environment's dynamics. Many existing methods that exploit dynamics information are difficult to train in practice due to an adversarial optimization process over reward and policy approximators or biased, high variance gradient estimators. We introduce a method for dynamics-aware IL which avoids adversarial training by learning a single Q-function, implicitly representing both reward and policy. On standard benchmarks, the implicitly learned rewards show a high positive correlation with the ground-truth rewards, illustrating our method can also be used for inverse reinforcement learning (IRL). Our method, Inverse soft-Q learning (IQ-Learn) obtains state-of-the-art results in offline and online imitation learning settings, surpassing existing methods both in the number of required environment interactions and scalability in high-dimensional spaces.
Wasserstein Distances for Stereo Disparity Estimation
Jul 06, 2020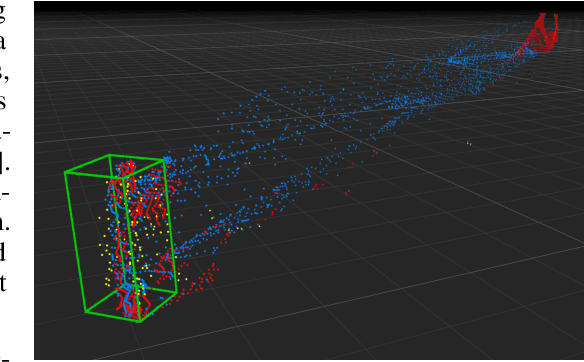
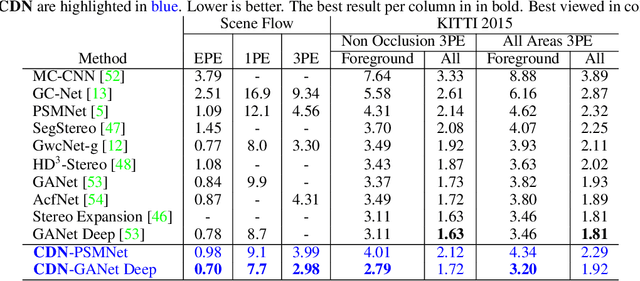
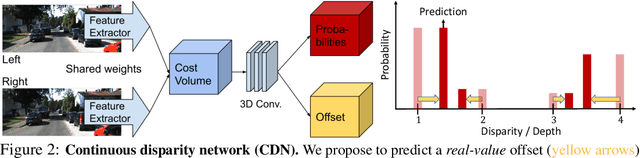
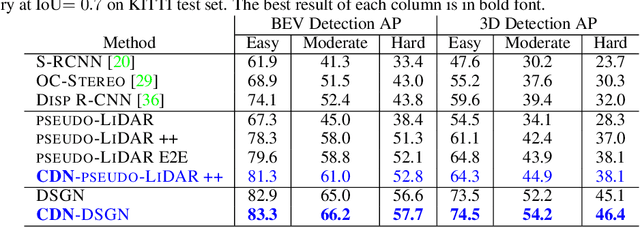
Existing approaches to depth or disparity estimation output a distribution over a set of pre-defined discrete values. This leads to inaccurate results when the true depth or disparity does not match any of these values. The fact that this distribution is usually learned indirectly through a regression loss causes further problems in ambiguous regions around object boundaries. We address these issues using a new neural network architecture that is capable of outputting arbitrary depth values, and a new loss function that is derived from the Wasserstein distance between the true and the predicted distributions. We validate our approach on a variety of tasks, including stereo disparity and depth estimation, and the downstream 3D object detection. Our approach drastically reduces the error in ambiguous regions, especially around object boundaries that greatly affect the localization of objects in 3D, achieving the state-of-the-art in 3D object detection for autonomous driving.
End-to-End Pseudo-LiDAR for Image-Based 3D Object Detection
Apr 07, 2020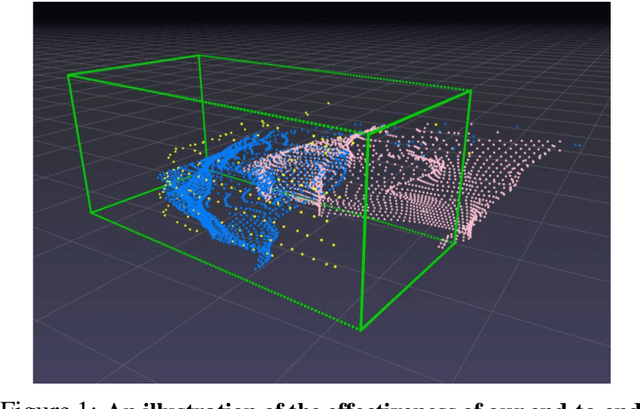
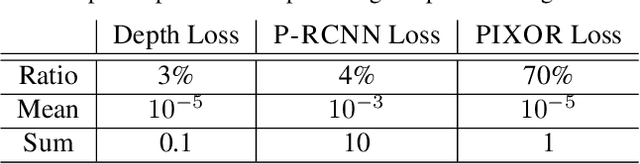
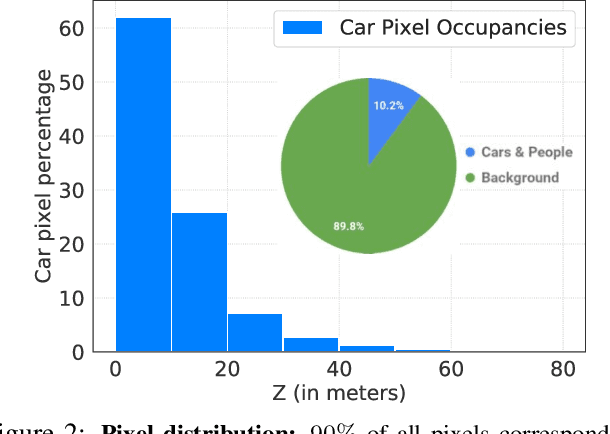
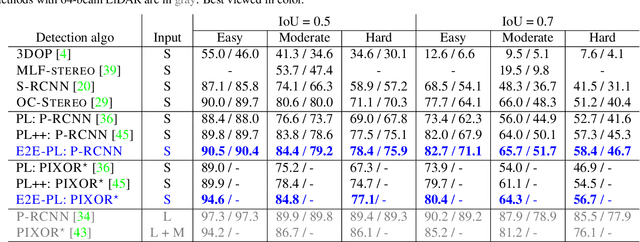
Reliable and accurate 3D object detection is a necessity for safe autonomous driving. Although LiDAR sensors can provide accurate 3D point cloud estimates of the environment, they are also prohibitively expensive for many settings. Recently, the introduction of pseudo-LiDAR (PL) has led to a drastic reduction in the accuracy gap between methods based on LiDAR sensors and those based on cheap stereo cameras. PL combines state-of-the-art deep neural networks for 3D depth estimation with those for 3D object detection by converting 2D depth map outputs to 3D point cloud inputs. However, so far these two networks have to be trained separately. In this paper, we introduce a new framework based on differentiable Change of Representation (CoR) modules that allow the entire PL pipeline to be trained end-to-end. The resulting framework is compatible with most state-of-the-art networks for both tasks and in combination with PointRCNN improves over PL consistently across all benchmarks -- yielding the highest entry on the KITTI image-based 3D object detection leaderboard at the time of submission. Our code will be made available at https://github.com/mileyan/pseudo-LiDAR_e2e.