 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA General Theoretical Paradigm to Understand Learning from Human Preferences
Oct 18, 2023

The prevalent deployment of learning from human preferences through reinforcement learning (RLHF) relies on two important approximations: the first assumes that pairwise preferences can be substituted with pointwise rewards. The second assumes that a reward model trained on these pointwise rewards can generalize from collected data to out-of-distribution data sampled by the policy. Recently, Direct Preference Optimisation (DPO) has been proposed as an approach that bypasses the second approximation and learn directly a policy from collected data without the reward modelling stage. However, this method still heavily relies on the first approximation. In this paper we try to gain a deeper theoretical understanding of these practical algorithms. In particular we derive a new general objective called $\Psi$PO for learning from human preferences that is expressed in terms of pairwise preferences and therefore bypasses both approximations. This new general objective allows us to perform an in-depth analysis of the behavior of RLHF and DPO (as special cases of $\Psi$PO) and to identify their potential pitfalls. We then consider another special case for $\Psi$PO by setting $\Psi$ simply to Identity, for which we can derive an efficient optimisation procedure, prove performance guarantees and demonstrate its empirical superiority to DPO on some illustrative examples.
Unlocking the Power of Representations in Long-term Novelty-based Exploration
May 02, 2023



We introduce Robust Exploration via Clustering-based Online Density Estimation (RECODE), a non-parametric method for novelty-based exploration that estimates visitation counts for clusters of states based on their similarity in a chosen embedding space. By adapting classical clustering to the nonstationary setting of Deep RL, RECODE can efficiently track state visitation counts over thousands of episodes. We further propose a novel generalization of the inverse dynamics loss, which leverages masked transformer architectures for multi-step prediction; which in conjunction with RECODE achieves a new state-of-the-art in a suite of challenging 3D-exploration tasks in DM-Hard-8. RECODE also sets new state-of-the-art in hard exploration Atari games, and is the first agent to reach the end screen in "Pitfall!".
The Edge of Orthogonality: A Simple View of What Makes BYOL Tick
Feb 09, 2023Self-predictive unsupervised learning methods such as BYOL or SimSiam have shown impressive results, and counter-intuitively, do not collapse to trivial representations. In this work, we aim at exploring the simplest possible mathematical arguments towards explaining the underlying mechanisms behind self-predictive unsupervised learning. We start with the observation that those methods crucially rely on the presence of a predictor network (and stop-gradient). With simple linear algebra, we show that when using a linear predictor, the optimal predictor is close to an orthogonal projection, and propose a general framework based on orthonormalization that enables to interpret and give intuition on why BYOL works. In addition, this framework demonstrates the crucial role of the exponential moving average and stop-gradient operator in BYOL as an efficient orthonormalization mechanism. We use these insights to propose four new \emph{closed-form predictor} variants of BYOL to support our analysis. Our closed-form predictors outperform standard linear trainable predictor BYOL at $100$ and $300$ epochs (top-$1$ linear accuracy on ImageNet).
Understanding Self-Predictive Learning for Reinforcement Learning
Dec 06, 2022



We study the learning dynamics of self-predictive learning for reinforcement learning, a family of algorithms that learn representations by minimizing the prediction error of their own future latent representations. Despite its recent empirical success, such algorithms have an apparent defect: trivial representations (such as constants) minimize the prediction error, yet it is obviously undesirable to converge to such solutions. Our central insight is that careful designs of the optimization dynamics are critical to learning meaningful representations. We identify that a faster paced optimization of the predictor and semi-gradient updates on the representation, are crucial to preventing the representation collapse. Then in an idealized setup, we show self-predictive learning dynamics carries out spectral decomposition on the state transition matrix, effectively capturing information of the transition dynamics. Building on the theoretical insights, we propose bidirectional self-predictive learning, a novel self-predictive algorithm that learns two representations simultaneously. We examine the robustness of our theoretical insights with a number of small-scale experiments and showcase the promise of the novel representation learning algorithm with large-scale experiments.
Mastering the Game of Stratego with Model-Free Multiagent Reinforcement Learning
Jun 30, 2022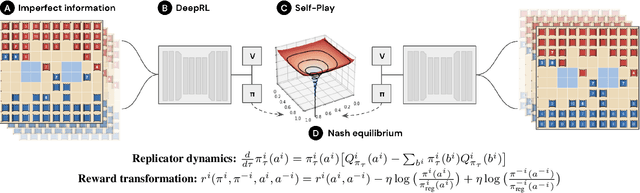
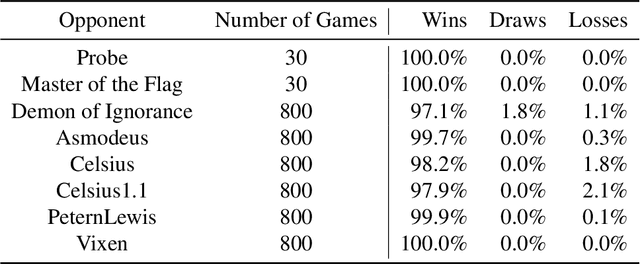
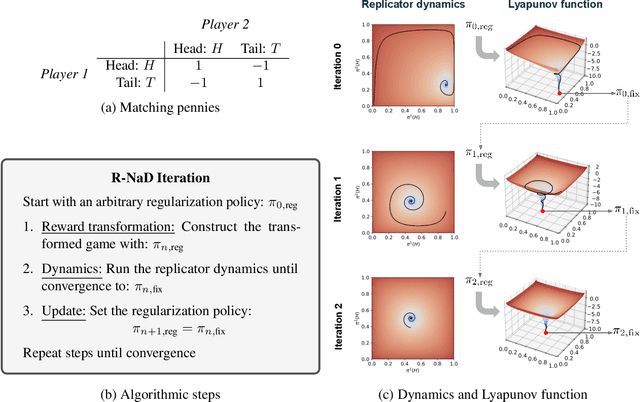
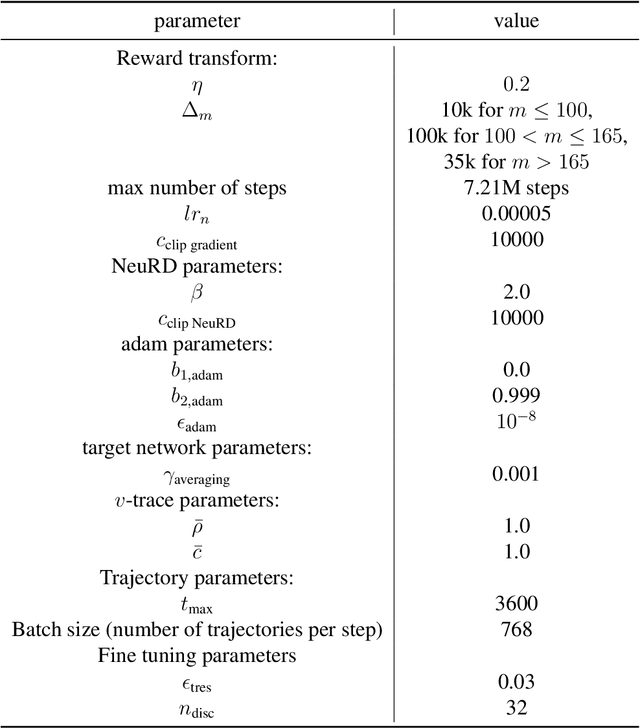
We introduce DeepNash, an autonomous agent capable of learning to play the imperfect information game Stratego from scratch, up to a human expert level. Stratego is one of the few iconic board games that Artificial Intelligence (AI) has not yet mastered. This popular game has an enormous game tree on the order of $10^{535}$ nodes, i.e., $10^{175}$ times larger than that of Go. It has the additional complexity of requiring decision-making under imperfect information, similar to Texas hold'em poker, which has a significantly smaller game tree (on the order of $10^{164}$ nodes). Decisions in Stratego are made over a large number of discrete actions with no obvious link between action and outcome. Episodes are long, with often hundreds of moves before a player wins, and situations in Stratego can not easily be broken down into manageably-sized sub-problems as in poker. For these reasons, Stratego has been a grand challenge for the field of AI for decades, and existing AI methods barely reach an amateur level of play. DeepNash uses a game-theoretic, model-free deep reinforcement learning method, without search, that learns to master Stratego via self-play. The Regularised Nash Dynamics (R-NaD) algorithm, a key component of DeepNash, converges to an approximate Nash equilibrium, instead of 'cycling' around it, by directly modifying the underlying multi-agent learning dynamics. DeepNash beats existing state-of-the-art AI methods in Stratego and achieved a yearly (2022) and all-time top-3 rank on the Gravon games platform, competing with human expert players.
BYOL-Explore: Exploration by Bootstrapped Prediction
Jun 16, 2022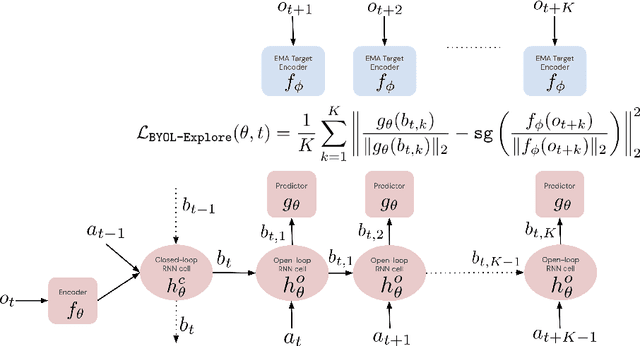
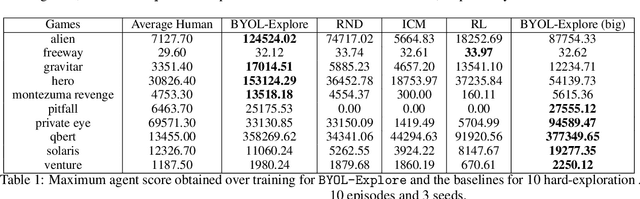
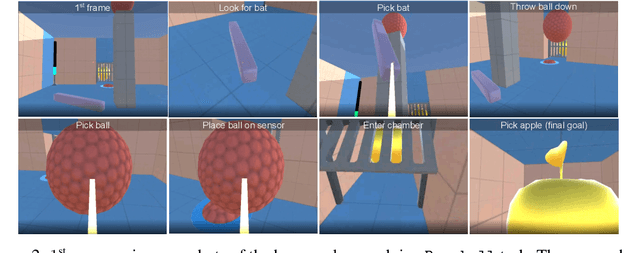
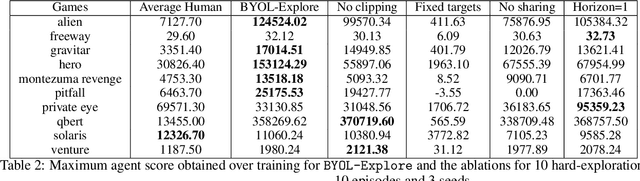
We present BYOL-Explore, a conceptually simple yet general approach for curiosity-driven exploration in visually-complex environments. BYOL-Explore learns a world representation, the world dynamics, and an exploration policy all-together by optimizing a single prediction loss in the latent space with no additional auxiliary objective. We show that BYOL-Explore is effective in DM-HARD-8, a challenging partially-observable continuous-action hard-exploration benchmark with visually-rich 3-D environments. On this benchmark, we solve the majority of the tasks purely through augmenting the extrinsic reward with BYOL-Explore s intrinsic reward, whereas prior work could only get off the ground with human demonstrations. As further evidence of the generality of BYOL-Explore, we show that it achieves superhuman performance on the ten hardest exploration games in Atari while having a much simpler design than other competitive agents.
Shaking the foundations: delusions in sequence models for interaction and control
Oct 20, 2021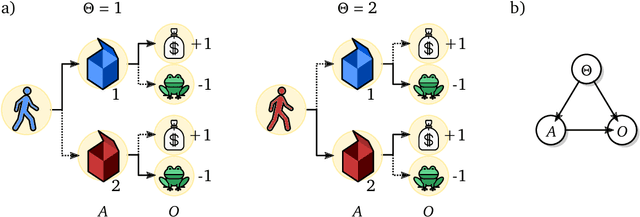
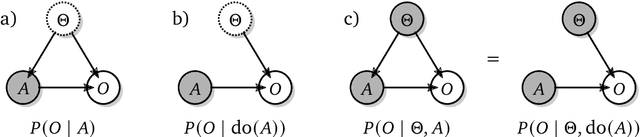
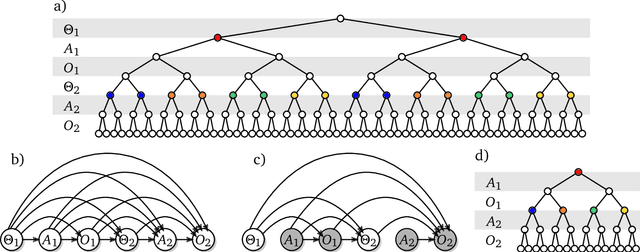
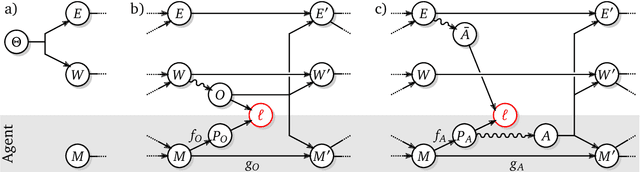
The recent phenomenal success of language models has reinvigorated machine learning research, and large sequence models such as transformers are being applied to a variety of domains. One important problem class that has remained relatively elusive however is purposeful adaptive behavior. Currently there is a common perception that sequence models "lack the understanding of the cause and effect of their actions" leading them to draw incorrect inferences due to auto-suggestive delusions. In this report we explain where this mismatch originates, and show that it can be resolved by treating actions as causal interventions. Finally, we show that in supervised learning, one can teach a system to condition or intervene on data by training with factual and counterfactual error signals respectively.
Geometric Entropic Exploration
Jan 07, 2021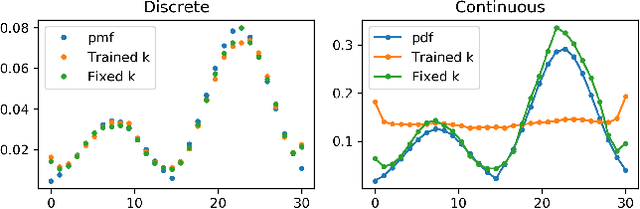
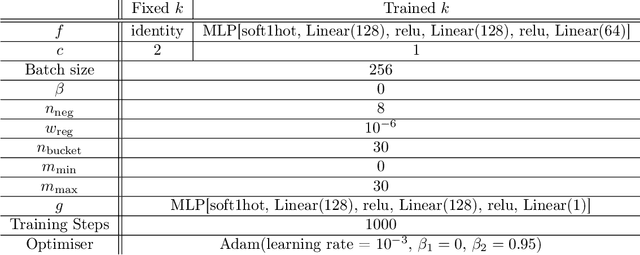
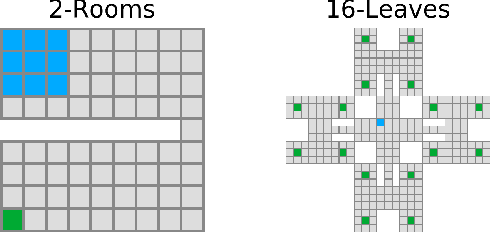
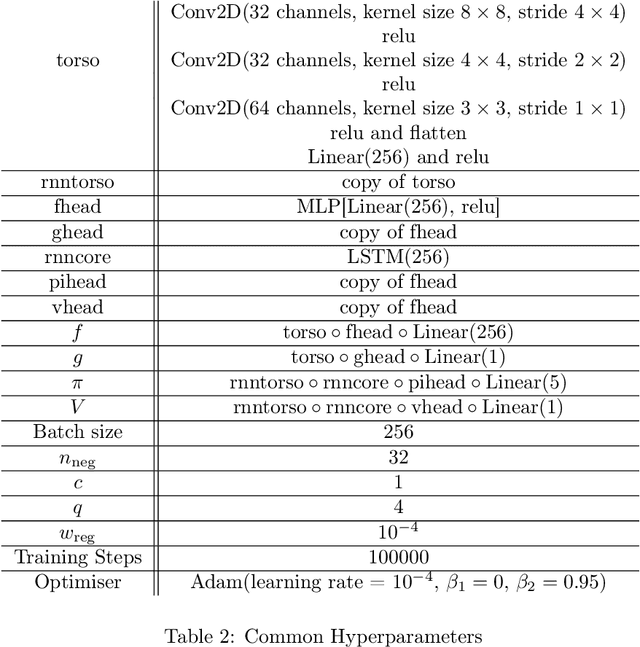
Exploration is essential for solving complex Reinforcement Learning (RL) tasks. Maximum State-Visitation Entropy (MSVE) formulates the exploration problem as a well-defined policy optimization problem whose solution aims at visiting all states as uniformly as possible. This is in contrast to standard uncertainty-based approaches where exploration is transient and eventually vanishes. However, existing approaches to MSVE are theoretically justified only for discrete state-spaces as they are oblivious to the geometry of continuous domains. We address this challenge by introducing Geometric Entropy Maximisation (GEM), a new algorithm that maximises the geometry-aware Shannon entropy of state-visits in both discrete and continuous domains. Our key theoretical contribution is casting geometry-aware MSVE exploration as a tractable problem of optimising a simple and novel noise-contrastive objective function. In our experiments, we show the efficiency of GEM in solving several RL problems with sparse rewards, compared against other deep RL exploration approaches.
BYOL works even without batch statistics
Oct 20, 2020

Bootstrap Your Own Latent (BYOL) is a self-supervised learning approach for image representation. From an augmented view of an image, BYOL trains an online network to predict a target network representation of a different augmented view of the same image. Unlike contrastive methods, BYOL does not explicitly use a repulsion term built from negative pairs in its training objective. Yet, it avoids collapse to a trivial, constant representation. Thus, it has recently been hypothesized that batch normalization (BN) is critical to prevent collapse in BYOL. Indeed, BN flows gradients across batch elements, and could leak information about negative views in the batch, which could act as an implicit negative (contrastive) term. However, we experimentally show that replacing BN with a batch-independent normalization scheme (namely, a combination of group normalization and weight standardization) achieves performance comparable to vanilla BYOL ($73.9\%$ vs. $74.3\%$ top-1 accuracy under the linear evaluation protocol on ImageNet with ResNet-$50$). Our finding disproves the hypothesis that the use of batch statistics is a crucial ingredient for BYOL to learn useful representations.
Bootstrap Your Own Latent: A New Approach to Self-Supervised Learning
Jun 13, 2020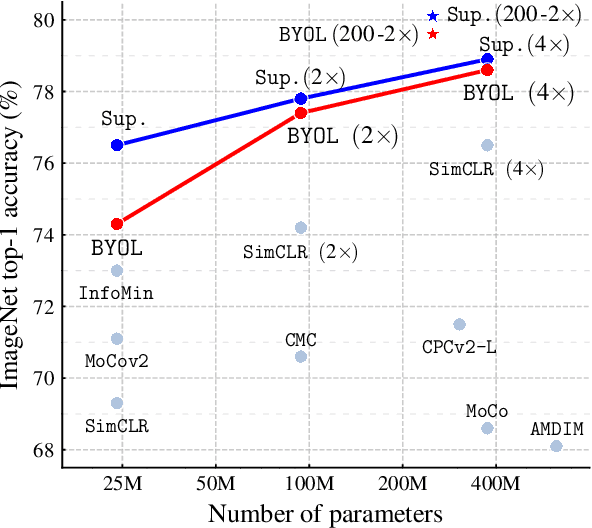
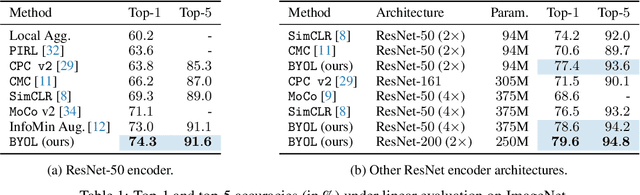
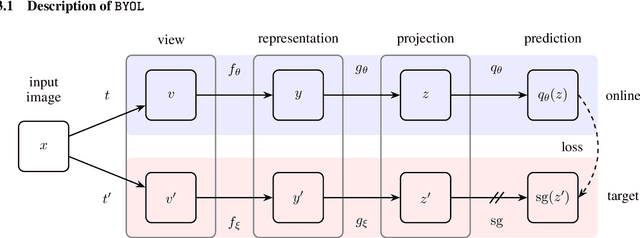
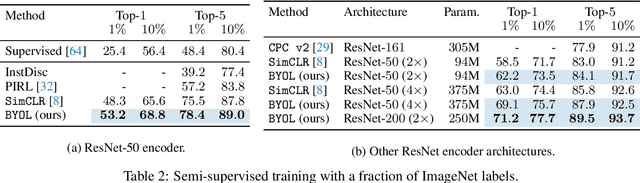
We introduce Bootstrap Your Own Latent (BYOL), a new approach to self-supervised image representation learning. BYOL relies on two neural networks, referred to as online and target networks, that interact and learn from each other. From an augmented view of an image, we train the online network to predict the target network representation of the same image under a different augmented view. At the same time, we update the target network with a slow-moving average of the online network. While state-of-the art methods intrinsically rely on negative pairs, BYOL achieves a new state of the art without them. BYOL reaches $74.3\%$ top-1 classification accuracy on ImageNet using the standard linear evaluation protocol with a ResNet-50 architecture and $79.6\%$ with a larger ResNet. We show that BYOL performs on par or better than the current state of the art on both transfer and semi-supervised benchmarks.