 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImitation by Predicting Observations
Jul 08, 2021
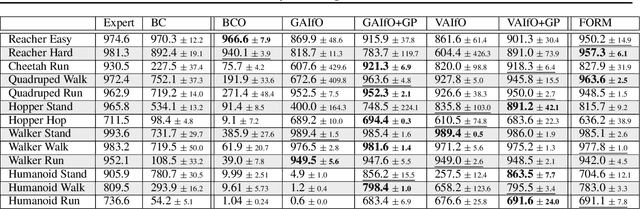
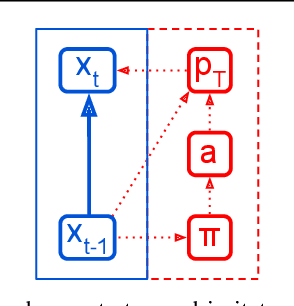
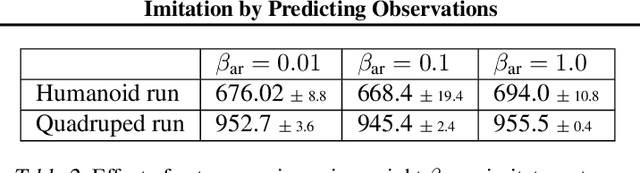
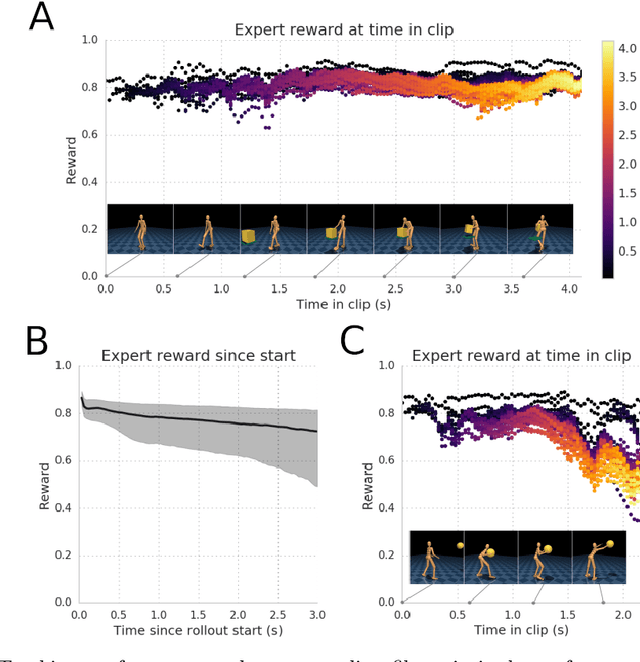
Imitation learning enables agents to reuse and adapt the hard-won expertise of others, offering a solution to several key challenges in learning behavior. Although it is easy to observe behavior in the real-world, the underlying actions may not be accessible. We present a new method for imitation solely from observations that achieves comparable performance to experts on challenging continuous control tasks while also exhibiting robustness in the presence of observations unrelated to the task. Our method, which we call FORM (for "Future Observation Reward Model") is derived from an inverse RL objective and imitates using a model of expert behavior learned by generative modelling of the expert's observations, without needing ground truth actions. We show that FORM performs comparably to a strong baseline IRL method (GAIL) on the DeepMind Control Suite benchmark, while outperforming GAIL in the presence of task-irrelevant features.
Imitating Interactive Intelligence
Jan 21, 2021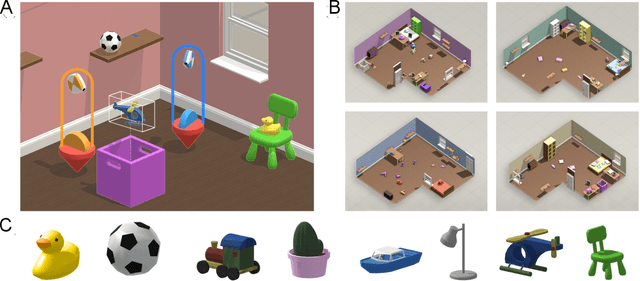
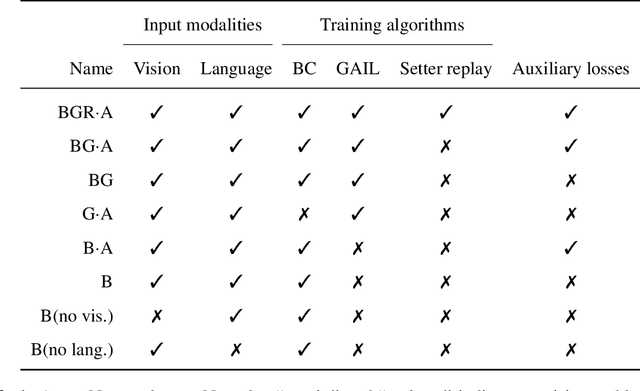
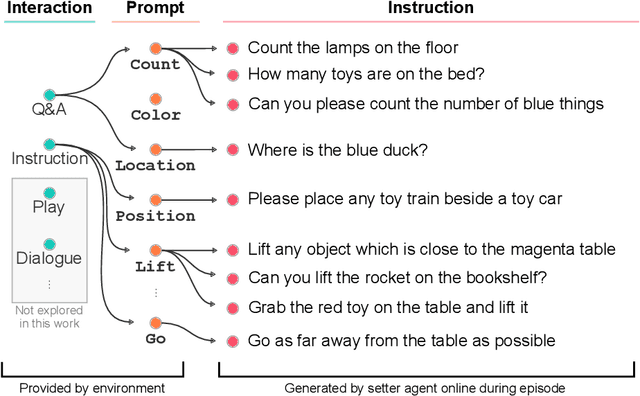
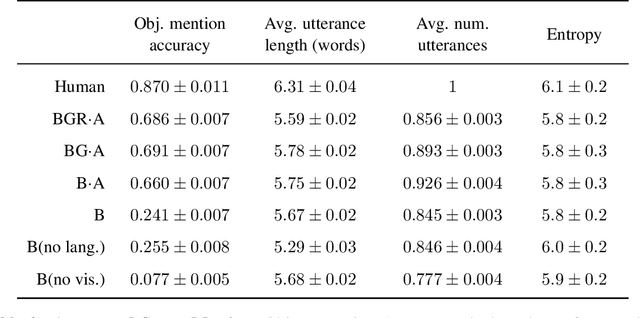
A common vision from science fiction is that robots will one day inhabit our physical spaces, sense the world as we do, assist our physical labours, and communicate with us through natural language. Here we study how to design artificial agents that can interact naturally with humans using the simplification of a virtual environment. This setting nevertheless integrates a number of the central challenges of artificial intelligence (AI) research: complex visual perception and goal-directed physical control, grounded language comprehension and production, and multi-agent social interaction. To build agents that can robustly interact with humans, we would ideally train them while they interact with humans. However, this is presently impractical. Therefore, we approximate the role of the human with another learned agent, and use ideas from inverse reinforcement learning to reduce the disparities between human-human and agent-agent interactive behaviour. Rigorously evaluating our agents poses a great challenge, so we develop a variety of behavioural tests, including evaluation by humans who watch videos of agents or interact directly with them. These evaluations convincingly demonstrate that interactive training and auxiliary losses improve agent behaviour beyond what is achieved by supervised learning of actions alone. Further, we demonstrate that agent capabilities generalise beyond literal experiences in the dataset. Finally, we train evaluation models whose ratings of agents agree well with human judgement, thus permitting the evaluation of new agent models without additional effort. Taken together, our results in this virtual environment provide evidence that large-scale human behavioural imitation is a promising tool to create intelligent, interactive agents, and the challenge of reliably evaluating such agents is possible to surmount.
Behavior Priors for Efficient Reinforcement Learning
Oct 27, 2020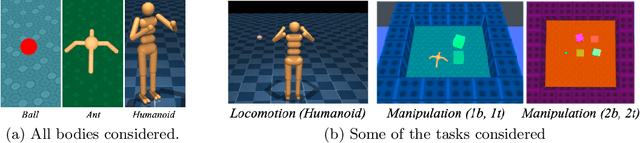
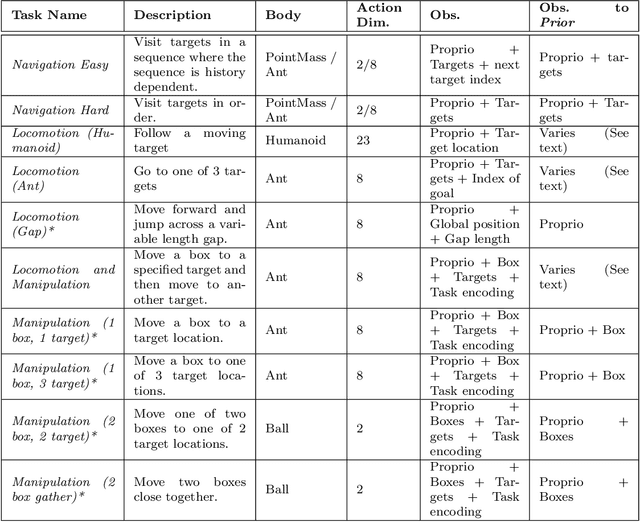
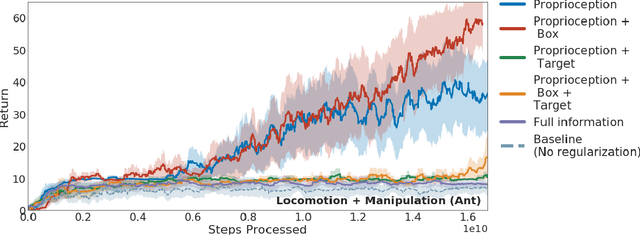

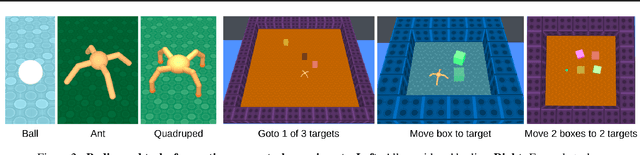
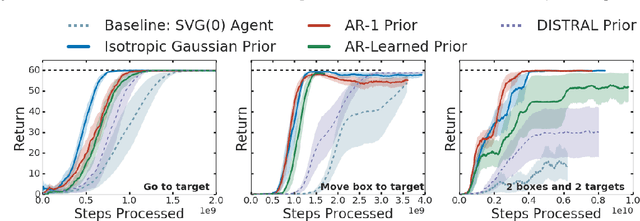
As we deploy reinforcement learning agents to solve increasingly challenging problems, methods that allow us to inject prior knowledge about the structure of the world and effective solution strategies becomes increasingly important. In this work we consider how information and architectural constraints can be combined with ideas from the probabilistic modeling literature to learn behavior priors that capture the common movement and interaction patterns that are shared across a set of related tasks or contexts. For example the day-to day behavior of humans comprises distinctive locomotion and manipulation patterns that recur across many different situations and goals. We discuss how such behavior patterns can be captured using probabilistic trajectory models and how these can be integrated effectively into reinforcement learning schemes, e.g.\ to facilitate multi-task and transfer learning. We then extend these ideas to latent variable models and consider a formulation to learn hierarchical priors that capture different aspects of the behavior in reusable modules. We discuss how such latent variable formulations connect to related work on hierarchical reinforcement learning (HRL) and mutual information and curiosity based objectives, thereby offering an alternative perspective on existing ideas. We demonstrate the effectiveness of our framework by applying it to a range of simulated continuous control domains.
Probing Emergent Semantics in Predictive Agents via Question Answering
Jun 01, 2020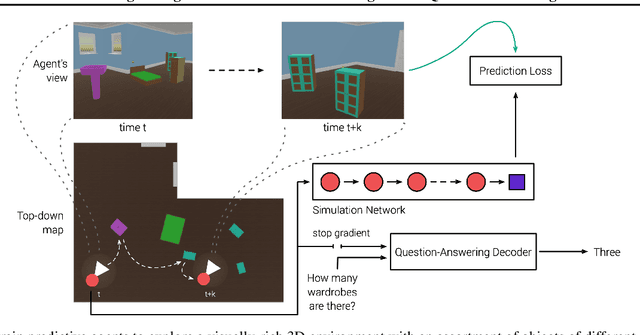
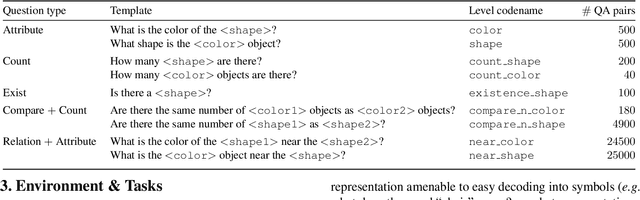
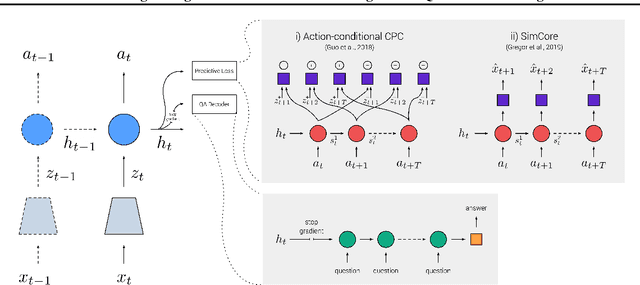
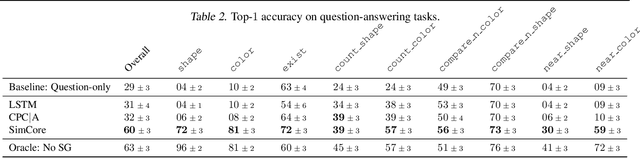
Recent work has shown how predictive modeling can endow agents with rich knowledge of their surroundings, improving their ability to act in complex environments. We propose question-answering as a general paradigm to decode and understand the representations that such agents develop, applying our method to two recent approaches to predictive modeling -action-conditional CPC (Guo et al., 2018) and SimCore (Gregor et al., 2019). After training agents with these predictive objectives in a visually-rich, 3D environment with an assortment of objects, colors, shapes, and spatial configurations, we probe their internal state representations with synthetic (English) questions, without backpropagating gradients from the question-answering decoder into the agent. The performance of different agents when probed this way reveals that they learn to encode factual, and seemingly compositional, information about objects, properties and spatial relations from their physical environment. Our approach is intuitive, i.e. humans can easily interpret responses of the model as opposed to inspecting continuous vectors, and model-agnostic, i.e. applicable to any modeling approach. By revealing the implicit knowledge of objects, quantities, properties and relations acquired by agents as they learn, question-conditional agent probing can stimulate the design and development of stronger predictive learning objectives.
Reusable neural skill embeddings for vision-guided whole body movement and object manipulation
Nov 15, 2019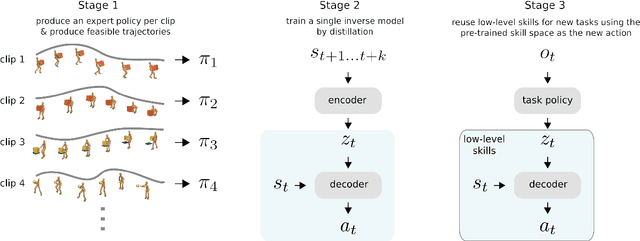
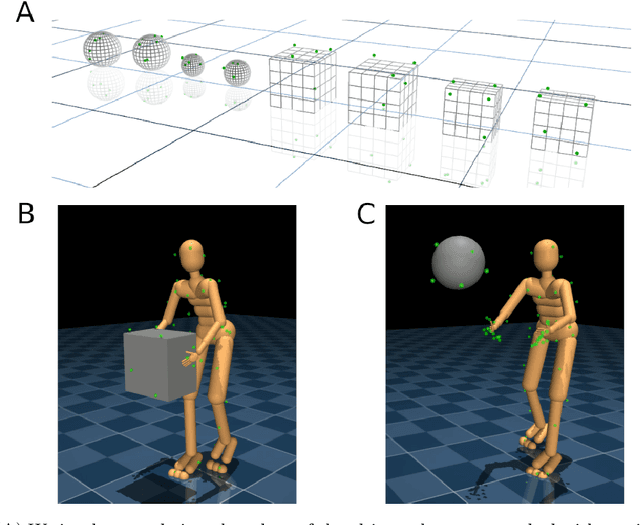
Both in simulation settings and robotics, there is an ambition to produce flexible control systems that can enable complex bodies to perform dynamic locomotion and natural object manipulation. In previous work, we developed a framework to train locomotor skills and reuse these skills for whole-body visuomotor tasks. Here, we extend this line of work to tasks involving whole body movement as well as visually guided manipulation of objects. This setting poses novel challenges in terms of task specification, exploration, and generalization. We develop an integrated approach consisting of a flexible motor primitive module, demonstrations, an instructed training regime as well as curricula in the form of task variations. We demonstrate the utility of our approach for solving challenging whole body tasks that require joint locomotion and manipulation, and characterize its behavioral robustness. We also provide a high-level overview video, see https://youtu.be/t0RDGSnE3cM .
V-MPO: On-Policy Maximum a Posteriori Policy Optimization for Discrete and Continuous Control
Sep 26, 2019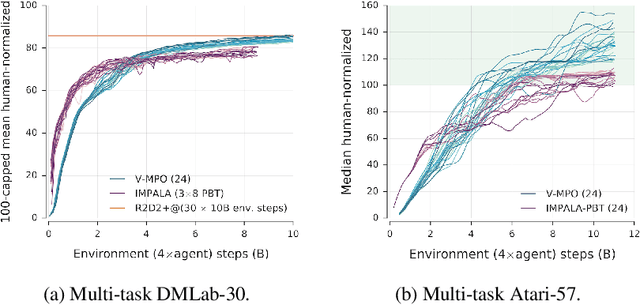
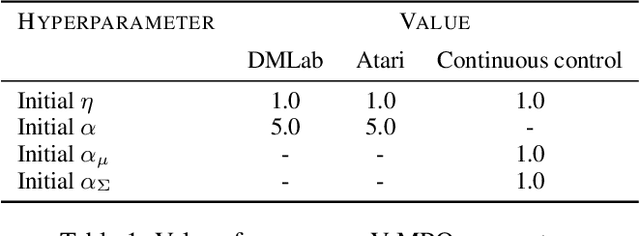
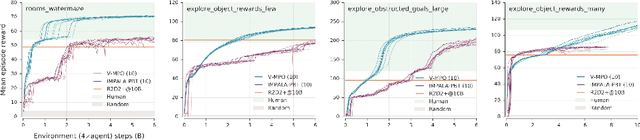
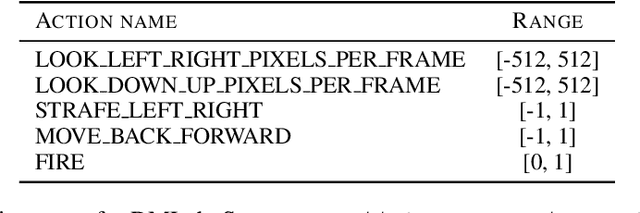
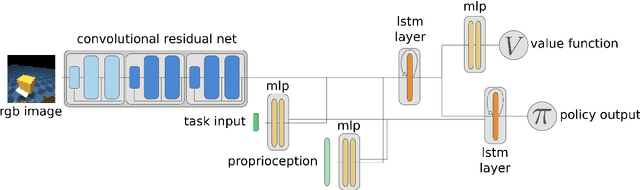
Some of the most successful applications of deep reinforcement learning to challenging domains in discrete and continuous control have used policy gradient methods in the on-policy setting. However, policy gradients can suffer from large variance that may limit performance, and in practice require carefully tuned entropy regularization to prevent policy collapse. As an alternative to policy gradient algorithms, we introduce V-MPO, an on-policy adaptation of Maximum a Posteriori Policy Optimization (MPO) that performs policy iteration based on a learned state-value function. We show that V-MPO surpasses previously reported scores for both the Atari-57 and DMLab-30 benchmark suites in the multi-task setting, and does so reliably without importance weighting, entropy regularization, or population-based tuning of hyperparameters. On individual DMLab and Atari levels, the proposed algorithm can achieve scores that are substantially higher than has previously been reported. V-MPO is also applicable to problems with high-dimensional, continuous action spaces, which we demonstrate in the context of learning to control simulated humanoids with 22 degrees of freedom from full state observations and 56 degrees of freedom from pixel observations, as well as example OpenAI Gym tasks where V-MPO achieves substantially higher asymptotic scores than previously reported.
Exploiting Hierarchy for Learning and Transfer in KL-regularized RL
Mar 18, 2019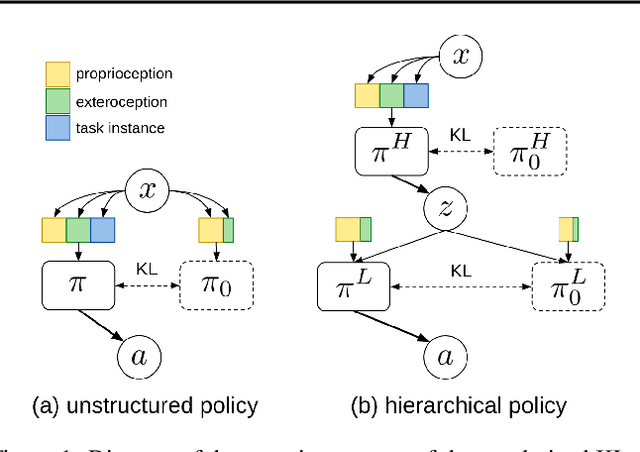
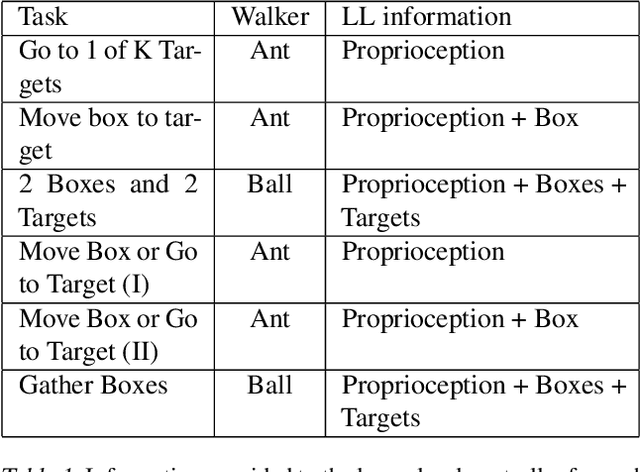
As reinforcement learning agents are tasked with solving more challenging and diverse tasks, the ability to incorporate prior knowledge into the learning system and to exploit reusable structure in solution space is likely to become increasingly important. The KL-regularized expected reward objective constitutes one possible tool to this end. It introduces an additional component, a default or prior behavior, which can be learned alongside the policy and as such partially transforms the reinforcement learning problem into one of behavior modelling. In this work we consider the implications of this framework in cases where both the policy and default behavior are augmented with latent variables. We discuss how the resulting hierarchical structures can be used to implement different inductive biases and how their modularity can benefit transfer. Empirically we find that they can lead to faster learning and transfer on a range of continuous control tasks.
Neural probabilistic motor primitives for humanoid control
Jan 15, 2019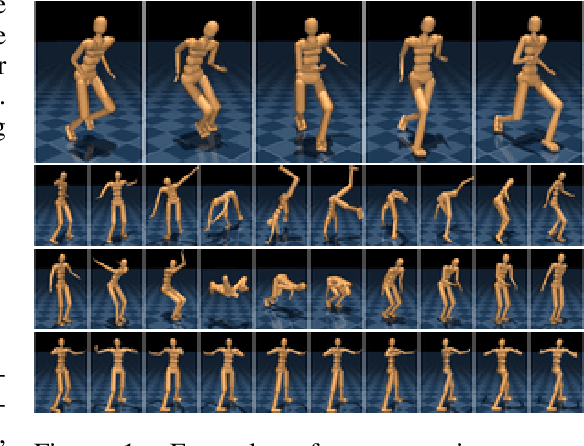
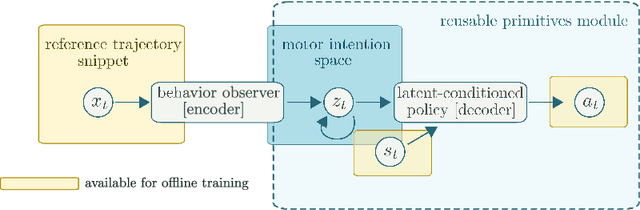
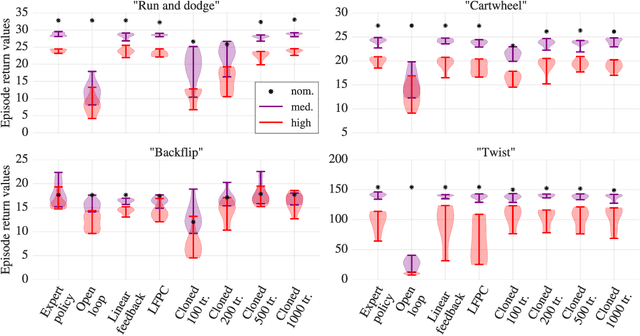
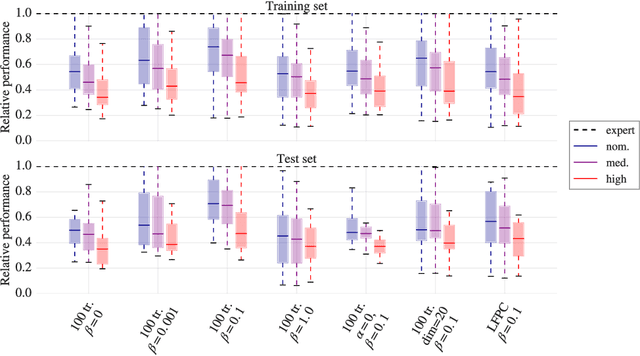
We focus on the problem of learning a single motor module that can flexibly express a range of behaviors for the control of high-dimensional physically simulated humanoids. To do this, we propose a motor architecture that has the general structure of an inverse model with a latent-variable bottleneck. We show that it is possible to train this model entirely offline to compress thousands of expert policies and learn a motor primitive embedding space. The trained neural probabilistic motor primitive system can perform one-shot imitation of whole-body humanoid behaviors, robustly mimicking unseen trajectories. Additionally, we demonstrate that it is also straightforward to train controllers to reuse the learned motor primitive space to solve tasks, and the resulting movements are relatively naturalistic. To support the training of our model, we compare two approaches for offline policy cloning, including an experience efficient method which we call linear feedback policy cloning. We encourage readers to view a supplementary video ( https://youtu.be/CaDEf-QcKwA ) summarizing our results.
Hierarchical visuomotor control of humanoids
Jan 15, 2019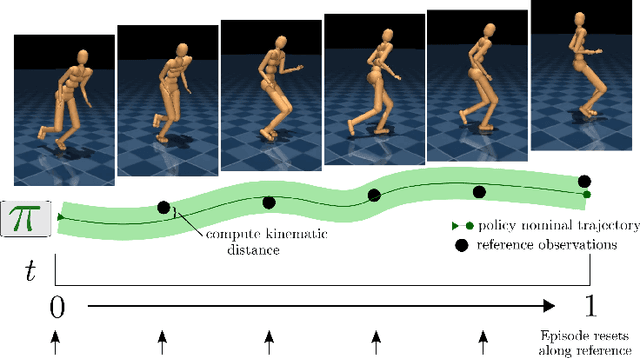
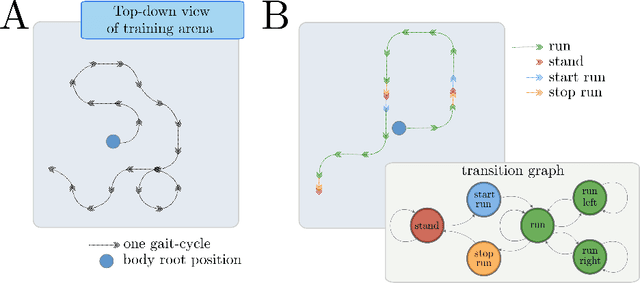
We aim to build complex humanoid agents that integrate perception, motor control, and memory. In this work, we partly factor this problem into low-level motor control from proprioception and high-level coordination of the low-level skills informed by vision. We develop an architecture capable of surprisingly flexible, task-directed motor control of a relatively high-DoF humanoid body by combining pre-training of low-level motor controllers with a high-level, task-focused controller that switches among low-level sub-policies. The resulting system is able to control a physically-simulated humanoid body to solve tasks that require coupling visual perception from an unstabilized egocentric RGB camera during locomotion in the environment. For a supplementary video link, see https://youtu.be/7GISvfbykLE .
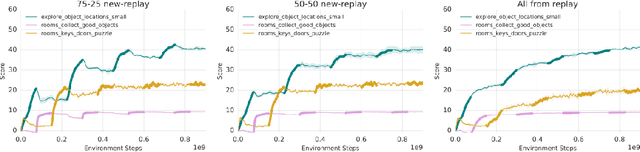
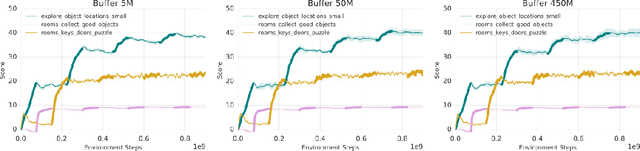
Experience Replay for Continual Learning
Nov 28, 2018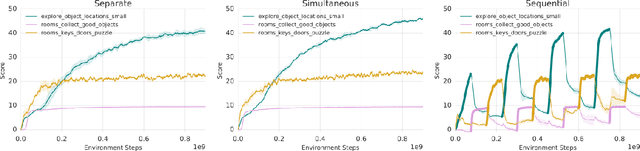
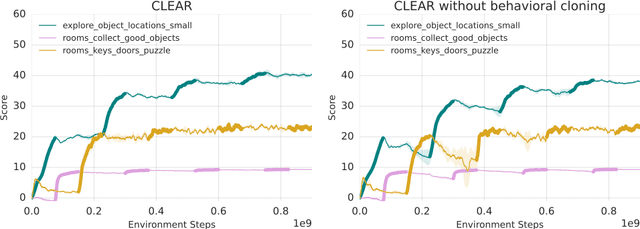
Continual learning is the problem of learning new tasks or knowledge while protecting old knowledge and ideally generalizing from old experience to learn new tasks faster. Neural networks trained by stochastic gradient descent often degrade on old tasks when trained successively on new tasks with different data distributions. This phenomenon, referred to as catastrophic forgetting, is considered a major hurdle to learning with non-stationary data or sequences of new tasks, and prevents networks from continually accumulating knowledge and skills. We examine this issue in the context of reinforcement learning, in a setting where an agent is exposed to tasks in a sequence. Unlike most other work, we do not provide an explicit indication to the model of task boundaries, which is the most general circumstance for a learning agent exposed to continuous experience. While various methods to counteract catastrophic forgetting have recently been proposed, we explore a straightforward, general, and seemingly overlooked solution - that of using experience replay buffers for all past events - with a mixture of on- and off-policy learning, leveraging behavioral cloning. We show that this strategy can still learn new tasks quickly yet can substantially reduce catastrophic forgetting in both Atari and DMLab domains, even matching the performance of methods that require task identities. When buffer storage is constrained, we confirm that a simple mechanism for randomly discarding data allows a limited size buffer to perform almost as well as an unbounded one.