 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Conversational Medical AI with Eyes, Ears and a Voice
May 10, 2026The practice of medicine relies not only upon skillful dialogue but also on the nuanced exchange and interpretation of rich auditory and visual cues between doctors and patients. Building on the low-latency voice and video processing capabilities of Gemini, we introduce AI co-clinician, a first-of-its-kind conversational AI system utilizing continuous streams of audio-visual data from live patient conversations to inform real-time clinical decisions. Its dual-agent architecture balances deep clinical reasoning with the low latency required for natural dialogue. To assess this system, we implemented a video-based interface emulating telemedicine consultations. We crafted 20 standardized outpatient scenarios requiring proactive real-time auditory and visual reasoning and designed "TelePACES" evaluation criteria alongside case-specific rubrics. In a randomized, interface-blinded, crossover simulation study (n = 120 encounters) with 10 internal medicine residents as patient actors, we compared AI co-clinician with primary care physicians (PCPs), GPT-Realtime, and a baseline agent. AI co-clinician approached PCPs in key TelePACES dimensions, including management plans and differential diagnosis, while significantly outperforming GPT-Realtime across all general criteria. While our agent demonstrated parity with PCPs in case-specific triage measures, physicians maintained superior overall performance in case-specific assessments. Although AI co-clinician marks a significant advance in real-time telemedical AI, gaps remain in physical examination and disease-specific reasoning. Our work shows that text-only approaches fail to capture the true challenges of medical consultation and suggests that high-stakes real-time diagnostic AI is most safely advanced in collaborative, triadic models where AI can be a supportive co-clinician for doctors and patients.
Would I have gotten that reward? Long-term credit assignment by counterfactual contribution analysis
Jun 29, 2023



To make reinforcement learning more sample efficient, we need better credit assignment methods that measure an action's influence on future rewards. Building upon Hindsight Credit Assignment (HCA), we introduce Counterfactual Contribution Analysis (COCOA), a new family of model-based credit assignment algorithms. Our algorithms achieve precise credit assignment by measuring the contribution of actions upon obtaining subsequent rewards, by quantifying a counterfactual query: "Would the agent still have reached this reward if it had taken another action?". We show that measuring contributions w.r.t. rewarding states, as is done in HCA, results in spurious estimates of contributions, causing HCA to degrade towards the high-variance REINFORCE estimator in many relevant environments. Instead, we measure contributions w.r.t. rewards or learned representations of the rewarding objects, resulting in gradient estimates with lower variance. We run experiments on a suite of problems specifically designed to evaluate long-term credit assignment capabilities. By using dynamic programming, we measure ground-truth policy gradients and show that the improved performance of our new model-based credit assignment methods is due to lower bias and variance compared to HCA and common baselines. Our results demonstrate how modeling action contributions towards rewarding outcomes can be leveraged for credit assignment, opening a new path towards sample-efficient reinforcement learning.
Intra-agent speech permits zero-shot task acquisition
Jun 07, 2022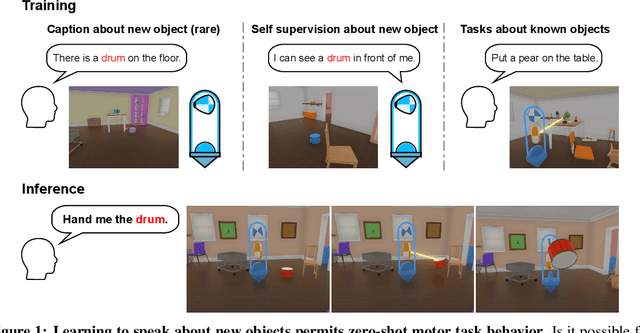
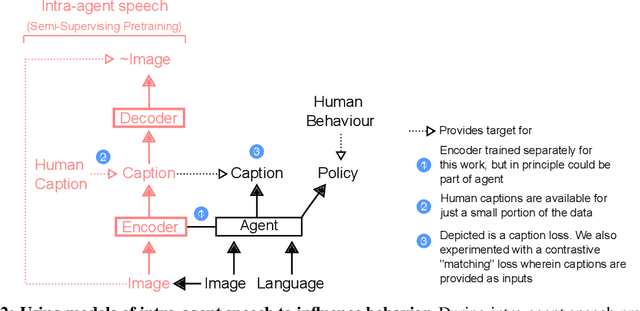
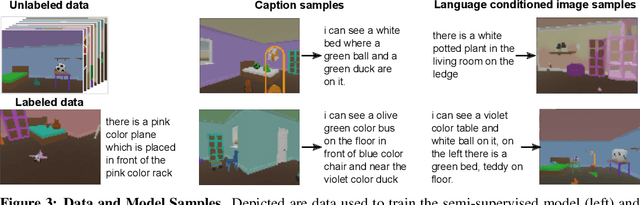
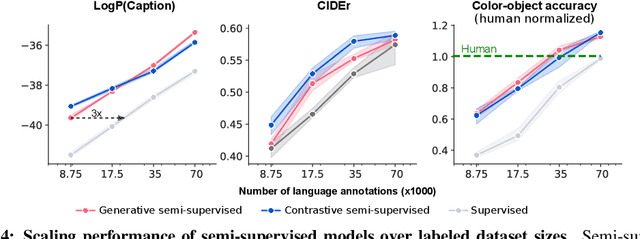
Human language learners are exposed to a trickle of informative, context-sensitive language, but a flood of raw sensory data. Through both social language use and internal processes of rehearsal and practice, language learners are able to build high-level, semantic representations that explain their perceptions. Here, we take inspiration from such processes of "inner speech" in humans (Vygotsky, 1934) to better understand the role of intra-agent speech in embodied behavior. First, we formally pose intra-agent speech as a semi-supervised problem and develop two algorithms that enable visually grounded captioning with little labeled language data. We then experimentally compute scaling curves over different amounts of labeled data and compare the data efficiency against a supervised learning baseline. Finally, we incorporate intra-agent speech into an embodied, mobile manipulator agent operating in a 3D virtual world, and show that with as few as 150 additional image captions, intra-agent speech endows the agent with the ability to manipulate and answer questions about a new object without any related task-directed experience (zero-shot). Taken together, our experiments suggest that modelling intra-agent speech is effective in enabling embodied agents to learn new tasks efficiently and without direct interaction experience.
Probing Emergent Semantics in Predictive Agents via Question Answering
Jun 01, 2020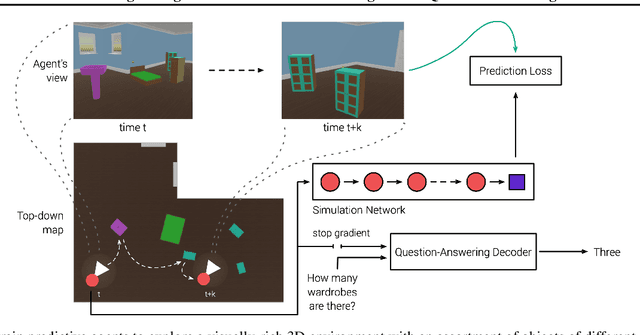
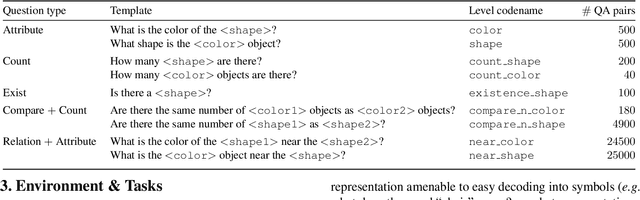
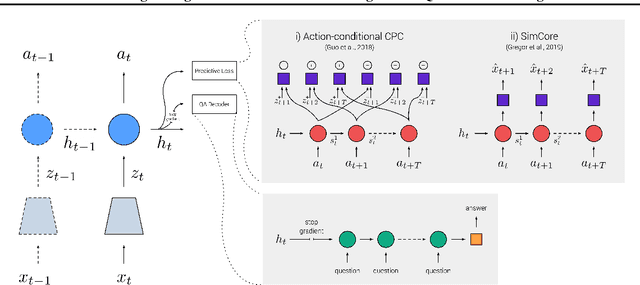
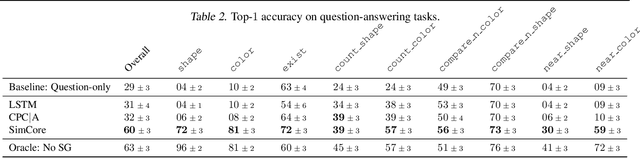
Recent work has shown how predictive modeling can endow agents with rich knowledge of their surroundings, improving their ability to act in complex environments. We propose question-answering as a general paradigm to decode and understand the representations that such agents develop, applying our method to two recent approaches to predictive modeling -action-conditional CPC (Guo et al., 2018) and SimCore (Gregor et al., 2019). After training agents with these predictive objectives in a visually-rich, 3D environment with an assortment of objects, colors, shapes, and spatial configurations, we probe their internal state representations with synthetic (English) questions, without backpropagating gradients from the question-answering decoder into the agent. The performance of different agents when probed this way reveals that they learn to encode factual, and seemingly compositional, information about objects, properties and spatial relations from their physical environment. Our approach is intuitive, i.e. humans can easily interpret responses of the model as opposed to inspecting continuous vectors, and model-agnostic, i.e. applicable to any modeling approach. By revealing the implicit knowledge of objects, quantities, properties and relations acquired by agents as they learn, question-conditional agent probing can stimulate the design and development of stronger predictive learning objectives.