 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReason first, then respond: Modular Generation for Knowledge-infused Dialogue
Nov 09, 2021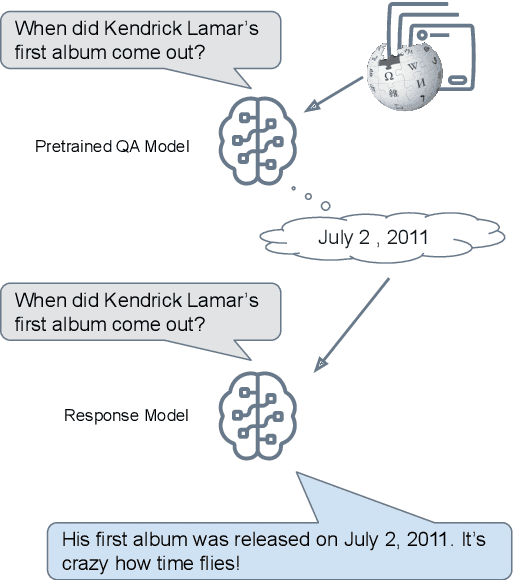
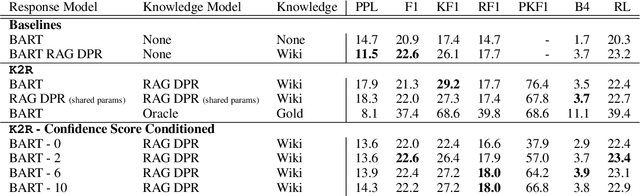
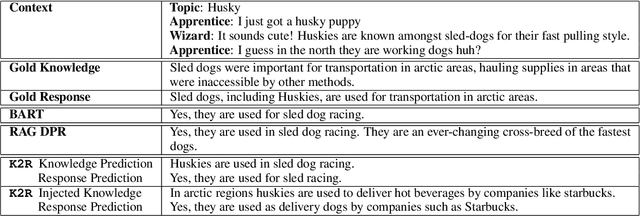
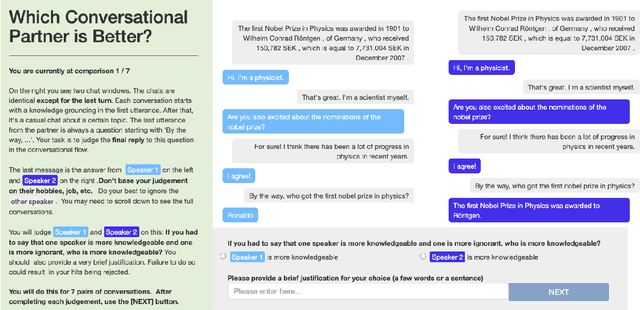
Large language models can produce fluent dialogue but often hallucinate factual inaccuracies. While retrieval-augmented models help alleviate this issue, they still face a difficult challenge of both reasoning to provide correct knowledge and generating conversation simultaneously. In this work, we propose a modular model, Knowledge to Response (K2R), for incorporating knowledge into conversational agents, which breaks down this problem into two easier steps. K2R first generates a knowledge sequence, given a dialogue context, as an intermediate step. After this "reasoning step", the model then attends to its own generated knowledge sequence, as well as the dialogue context, to produce a final response. In detailed experiments, we find that such a model hallucinates less in knowledge-grounded dialogue tasks, and has advantages in terms of interpretability and modularity. In particular, it can be used to fuse QA and dialogue systems together to enable dialogue agents to give knowledgeable answers, or QA models to give conversational responses in a zero-shot setting.
NeurIPS 2021 Competition IGLU: Interactive Grounded Language Understanding in a Collaborative Environment
Oct 15, 2021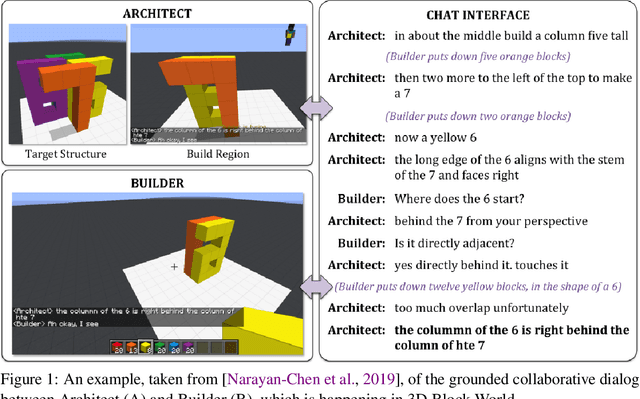

Human intelligence has the remarkable ability to adapt to new tasks and environments quickly. Starting from a very young age, humans acquire new skills and learn how to solve new tasks either by imitating the behavior of others or by following provided natural language instructions. To facilitate research in this direction, we propose IGLU: Interactive Grounded Language Understanding in a Collaborative Environment. The primary goal of the competition is to approach the problem of how to build interactive agents that learn to solve a task while provided with grounded natural language instructions in a collaborative environment. Understanding the complexity of the challenge, we split it into sub-tasks to make it feasible for participants. This research challenge is naturally related, but not limited, to two fields of study that are highly relevant to the NeurIPS community: Natural Language Understanding and Generation (NLU/G) and Reinforcement Learning (RL). Therefore, the suggested challenge can bring two communities together to approach one of the important challenges in AI. Another important aspect of the challenge is the dedication to perform a human-in-the-loop evaluation as a final evaluation for the agents developed by contestants.
Beyond Goldfish Memory: Long-Term Open-Domain Conversation
Jul 15, 2021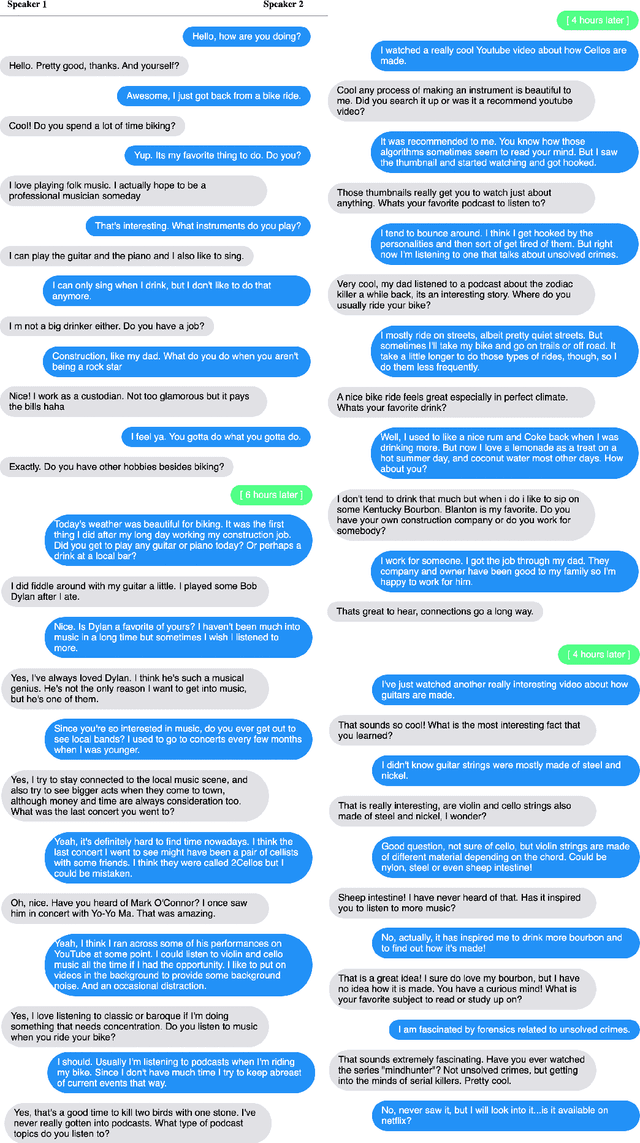
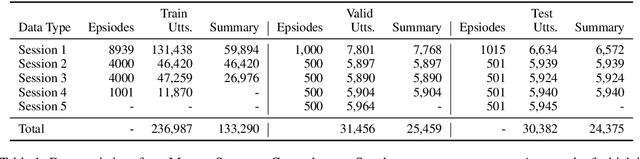
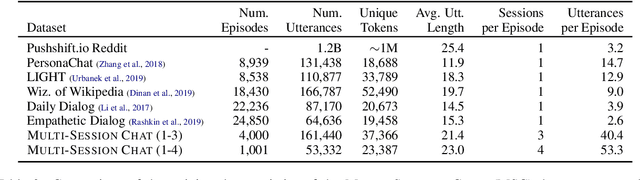
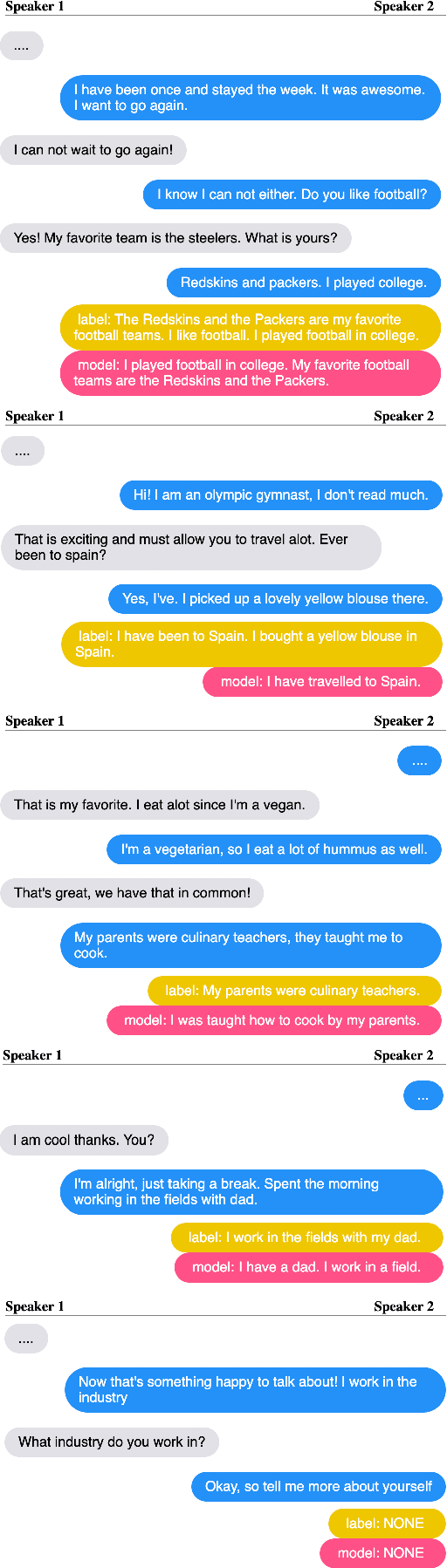
Despite recent improvements in open-domain dialogue models, state of the art models are trained and evaluated on short conversations with little context. In contrast, the long-term conversation setting has hardly been studied. In this work we collect and release a human-human dataset consisting of multiple chat sessions whereby the speaking partners learn about each other's interests and discuss the things they have learnt from past sessions. We show how existing models trained on existing datasets perform poorly in this long-term conversation setting in both automatic and human evaluations, and we study long-context models that can perform much better. In particular, we find retrieval-augmented methods and methods with an ability to summarize and recall previous conversations outperform the standard encoder-decoder architectures currently considered state of the art.
Hash Layers For Large Sparse Models
Jun 16, 2021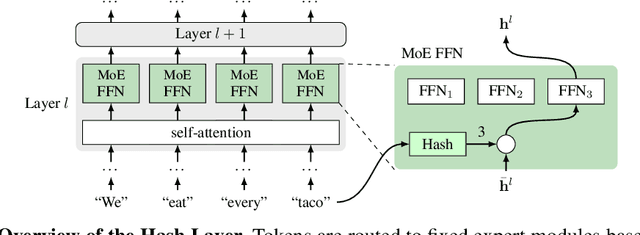
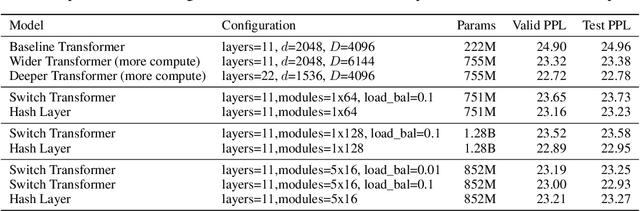

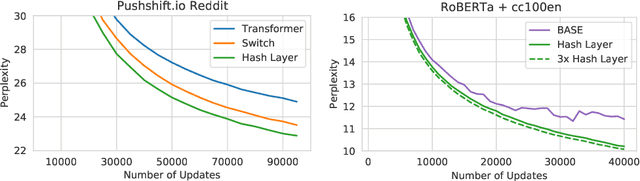
We investigate the training of sparse layers that use different parameters for different inputs based on hashing in large Transformer models. Specifically, we modify the feedforward layer to hash to different sets of weights depending on the current token, over all tokens in the sequence. We show that this procedure either outperforms or is competitive with learning-to-route mixture-of-expert methods such as Switch Transformers and BASE Layers, while requiring no routing parameters or extra terms in the objective function such as a load balancing loss, and no sophisticated assignment algorithm. We study the performance of different hashing techniques, hash sizes and input features, and show that balanced and random hashes focused on the most local features work best, compared to either learning clusters or using longer-range context. We show our approach works well both on large language modeling and dialogue tasks, and on downstream fine-tuning tasks.
Not All Memories are Created Equal: Learning to Forget by Expiring
May 13, 2021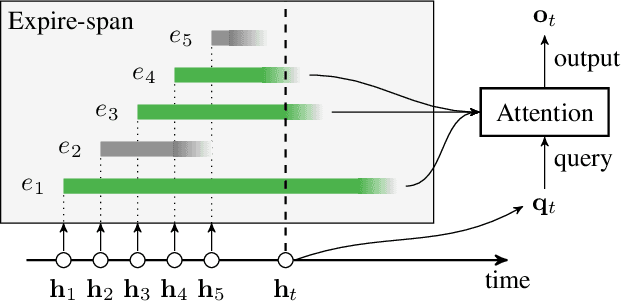
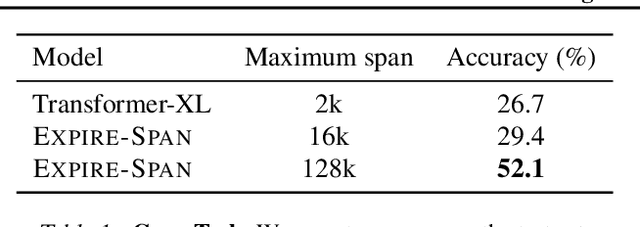
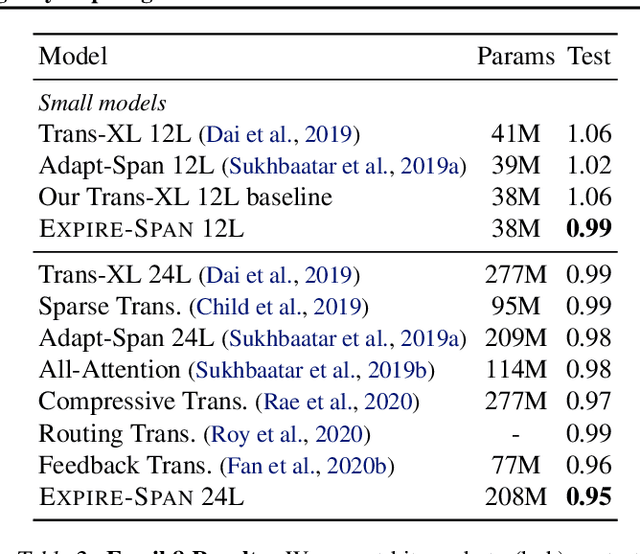

Attention mechanisms have shown promising results in sequence modeling tasks that require long-term memory. Recent work investigated mechanisms to reduce the computational cost of preserving and storing memories. However, not all content in the past is equally important to remember. We propose Expire-Span, a method that learns to retain the most important information and expire the irrelevant information. This forgetting of memories enables Transformers to scale to attend over tens of thousands of previous timesteps efficiently, as not all states from previous timesteps are preserved. We demonstrate that Expire-Span can help models identify and retain critical information and show it can achieve strong performance on reinforcement learning tasks specifically designed to challenge this functionality. Next, we show that Expire-Span can scale to memories that are tens of thousands in size, setting a new state of the art on incredibly long context tasks such as character-level language modeling and a frame-by-frame moving objects task. Finally, we analyze the efficiency of Expire-Span compared to existing approaches and demonstrate that it trains faster and uses less memory.
droidlet: modular, heterogenous, multi-modal agents
Jan 25, 2021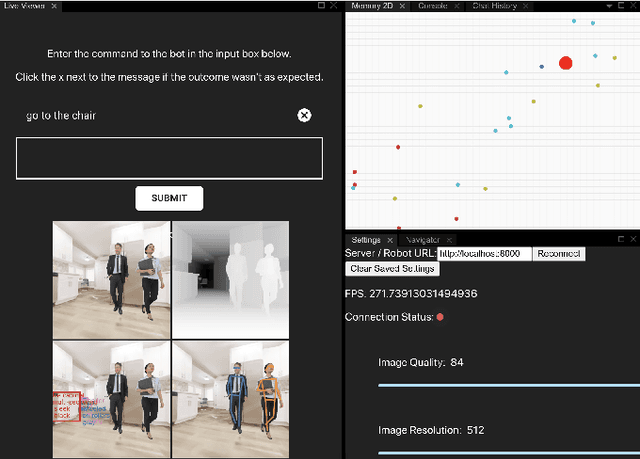
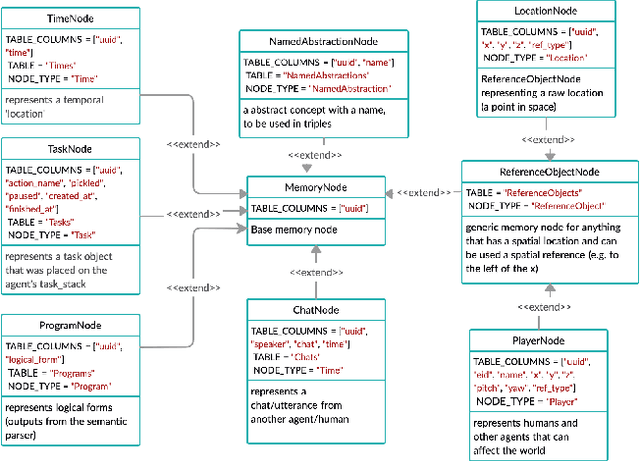
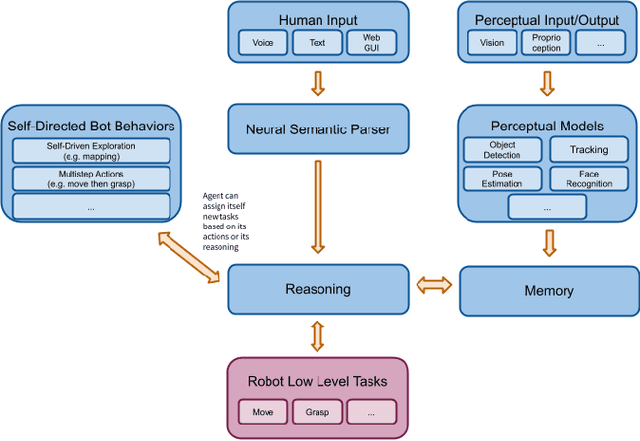
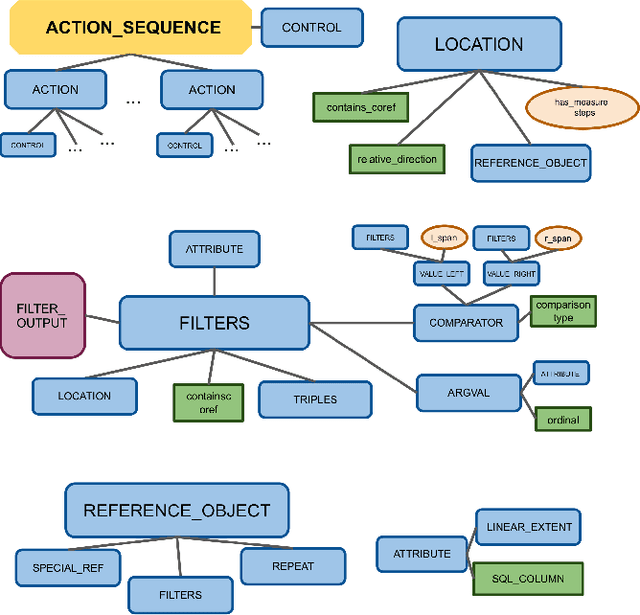
In recent years, there have been significant advances in building end-to-end Machine Learning (ML) systems that learn at scale. But most of these systems are: (a) isolated (perception, speech, or language only); (b) trained on static datasets. On the other hand, in the field of robotics, large-scale learning has always been difficult. Supervision is hard to gather and real world physical interactions are expensive. In this work we introduce and open-source droidlet, a modular, heterogeneous agent architecture and platform. It allows us to exploit both large-scale static datasets in perception and language and sophisticated heuristics often used in robotics; and provides tools for interactive annotation. Furthermore, it brings together perception, language and action onto one platform, providing a path towards agents that learn from the richness of real world interactions.
Linguistic calibration through metacognition: aligning dialogue agent responses with expected correctness
Dec 30, 2020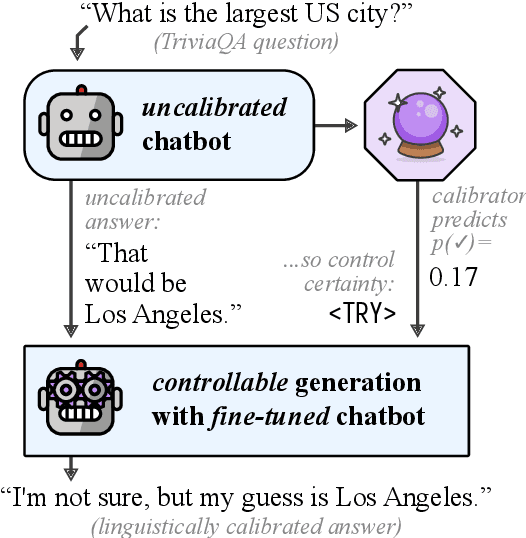
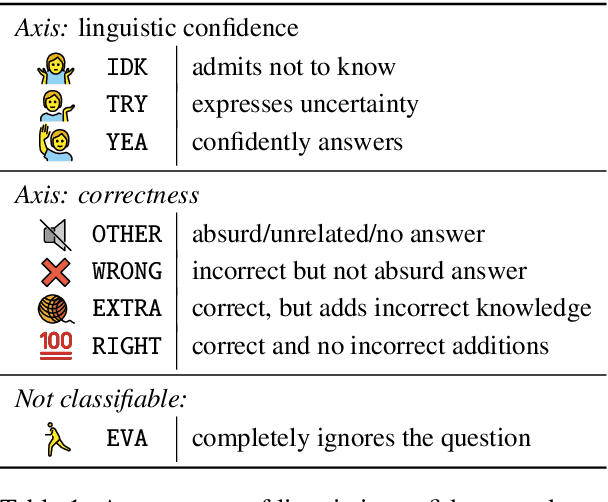
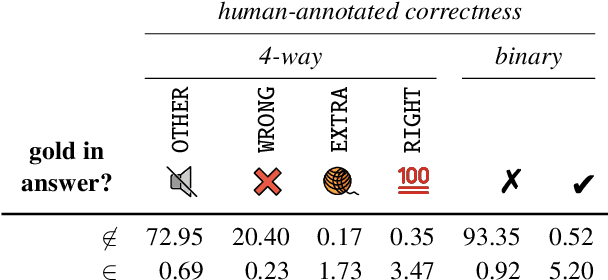
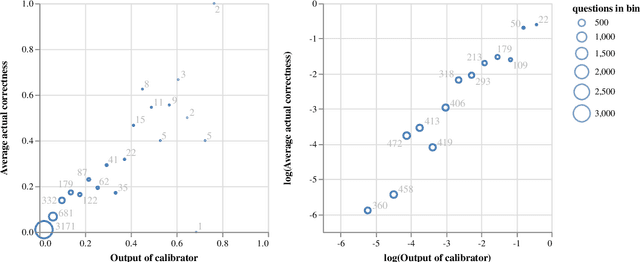
Open-domain dialogue agents have vastly improved, but still confidently hallucinate knowledge or express doubt when asked straightforward questions. In this work, we analyze whether state-of-the-art chit-chat models can express metacognition capabilities through their responses: does a verbalized expression of doubt (or confidence) match the likelihood that the model's answer is incorrect (or correct)? We find that these models are poorly calibrated in this sense, yet we show that the representations within the models can be used to accurately predict likelihood of correctness. By incorporating these correctness predictions into the training of a controllable generation model, we obtain a dialogue agent with greatly improved linguistic calibration.
Few-shot Sequence Learning with Transformers
Dec 17, 2020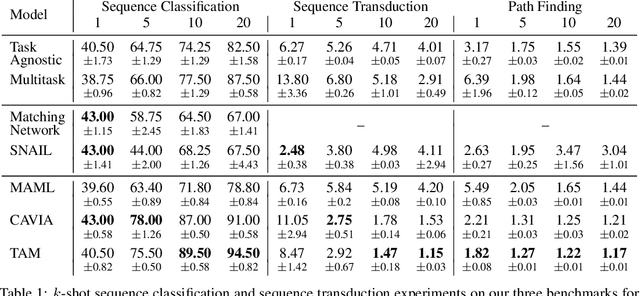
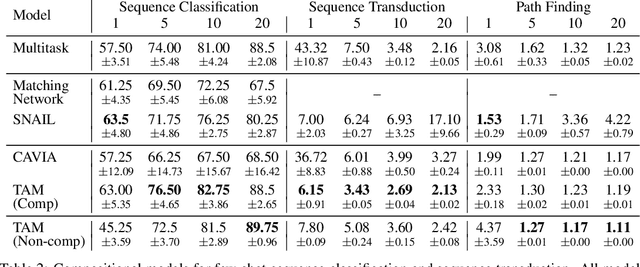
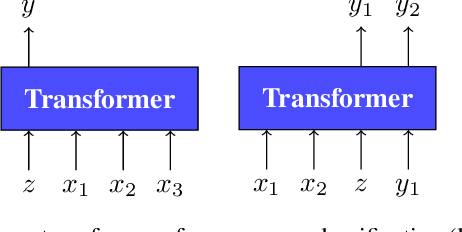
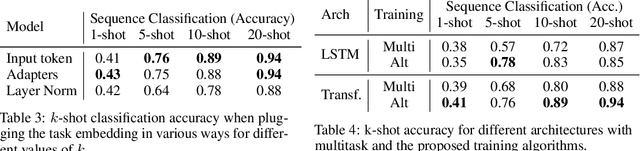
Few-shot algorithms aim at learning new tasks provided only a handful of training examples. In this work we investigate few-shot learning in the setting where the data points are sequences of tokens and propose an efficient learning algorithm based on Transformers. In the simplest setting, we append a token to an input sequence which represents the particular task to be undertaken, and show that the embedding of this token can be optimized on the fly given few labeled examples. Our approach does not require complicated changes to the model architecture such as adapter layers nor computing second order derivatives as is currently popular in the meta-learning and few-shot learning literature. We demonstrate our approach on a variety of tasks, and analyze the generalization properties of several model variants and baseline approaches. In particular, we show that compositional task descriptors can improve performance. Experiments show that our approach works at least as well as other methods, while being more computationally efficient.
CURI: A Benchmark for Productive Concept Learning Under Uncertainty
Oct 06, 2020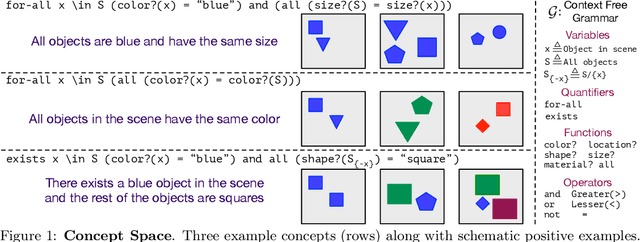
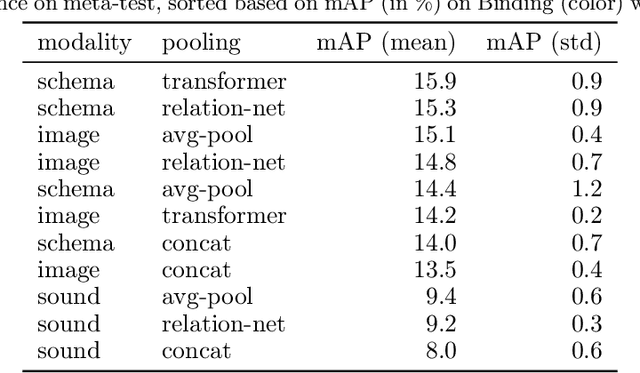
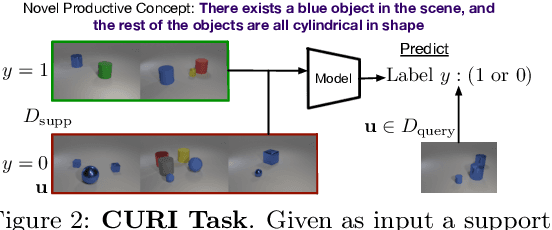
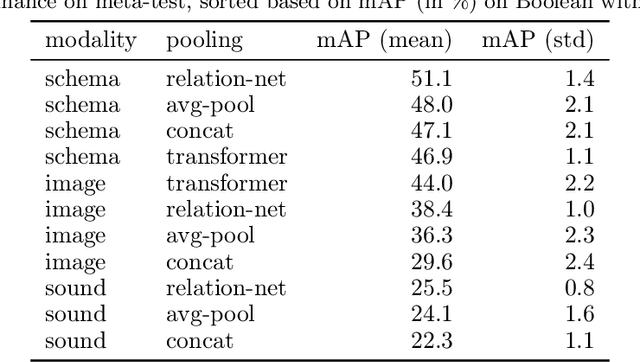
Humans can learn and reason under substantial uncertainty in a space of infinitely many concepts, including structured relational concepts ("a scene with objects that have the same color") and ad-hoc categories defined through goals ("objects that could fall on one's head"). In contrast, standard classification benchmarks: 1) consider only a fixed set of category labels, 2) do not evaluate compositional concept learning and 3) do not explicitly capture a notion of reasoning under uncertainty. We introduce a new few-shot, meta-learning benchmark, Compositional Reasoning Under Uncertainty (CURI) to bridge this gap. CURI evaluates different aspects of productive and systematic generalization, including abstract understandings of disentangling, productive generalization, learning boolean operations, variable binding, etc. Importantly, it also defines a model-independent "compositionality gap" to evaluate the difficulty of generalizing out-of-distribution along each of these axes. Extensive evaluations across a range of modeling choices spanning different modalities (image, schemas, and sounds), splits, privileged auxiliary concept information, and choices of negatives reveal substantial scope for modeling advances on the proposed task. All code and datasets will be available online.
How to Motivate Your Dragon: Teaching Goal-Driven Agents to Speak and Act in Fantasy Worlds
Oct 01, 2020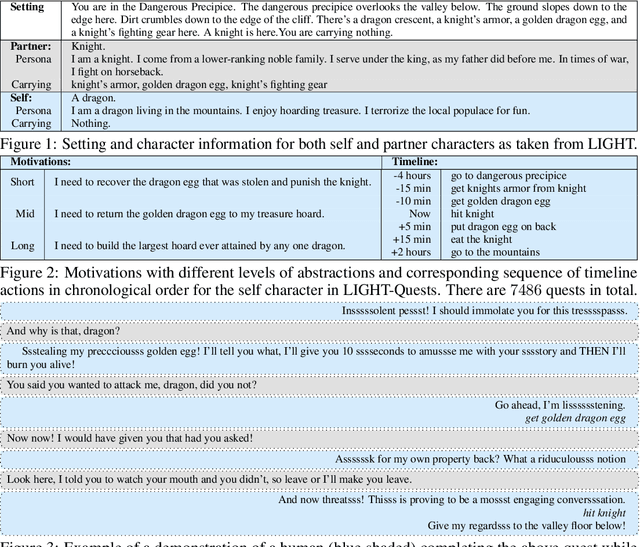
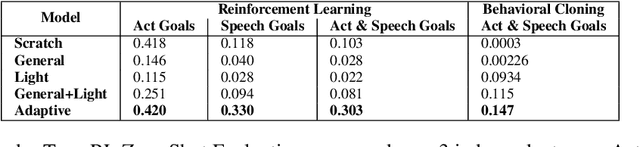

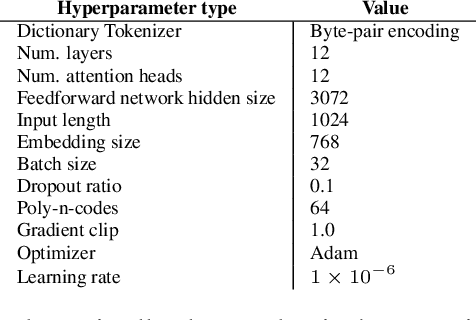
We seek to create agents that both act and communicate with other agents in pursuit of a goal. Towards this end, we extend LIGHT (Urbanek et al. 2019)---a large-scale crowd-sourced fantasy text-game---with a dataset of quests. These contain natural language motivations paired with in-game goals and human demonstrations; completing a quest might require dialogue or actions (or both). We introduce a reinforcement learning system that (1) incorporates large-scale language modeling-based and commonsense reasoning-based pre-training to imbue the agent with relevant priors; and (2) leverages a factorized action space of action commands and dialogue, balancing between the two. We conduct zero-shot evaluations using held-out human expert demonstrations, showing that our agents are able to act consistently and talk naturally with respect to their motivations.