 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFourier Neural Operator with Learned Deformations for PDEs on General Geometries
Jul 11, 2022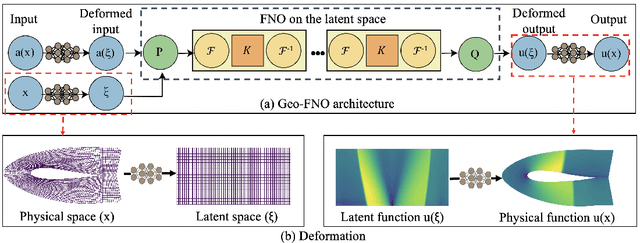
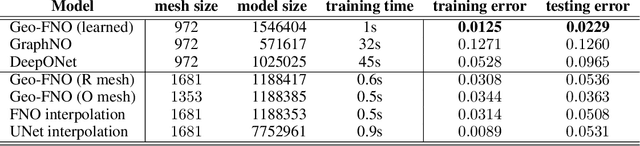
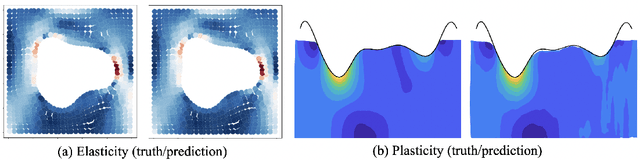
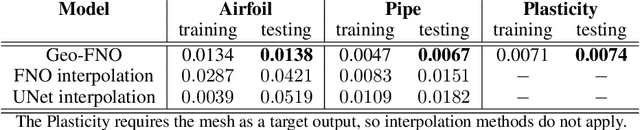
Deep learning surrogate models have shown promise in solving partial differential equations (PDEs). Among them, the Fourier neural operator (FNO) achieves good accuracy, and is significantly faster compared to numerical solvers, on a variety of PDEs, such as fluid flows. However, the FNO uses the Fast Fourier transform (FFT), which is limited to rectangular domains with uniform grids. In this work, we propose a new framework, viz., geo-FNO, to solve PDEs on arbitrary geometries. Geo-FNO learns to deform the input (physical) domain, which may be irregular, into a latent space with a uniform grid. The FNO model with the FFT is applied in the latent space. The resulting geo-FNO model has both the computation efficiency of FFT and the flexibility of handling arbitrary geometries. Our geo-FNO is also flexible in terms of its input formats, viz., point clouds, meshes, and design parameters are all valid inputs. We consider a variety of PDEs such as the Elasticity, Plasticity, Euler's, and Navier-Stokes equations, and both forward modeling and inverse design problems. Geo-FNO is $10^5$ times faster than the standard numerical solvers and twice more accurate compared to direct interpolation on existing ML-based PDE solvers such as the standard FNO.
Large Scale Mask Optimization Via Convolutional Fourier Neural Operator and Litho-Guided Self Training
Jul 08, 2022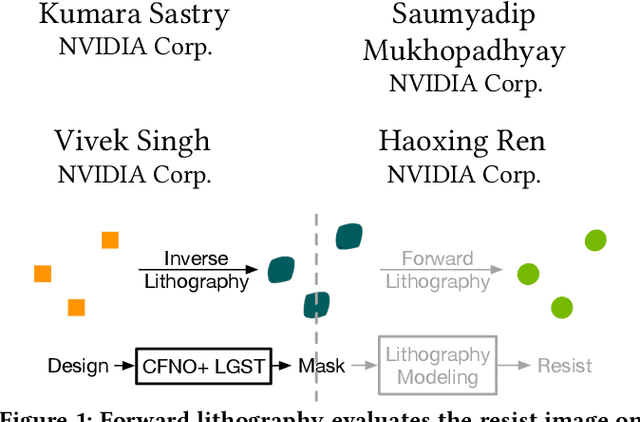
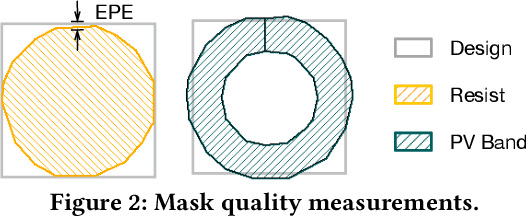
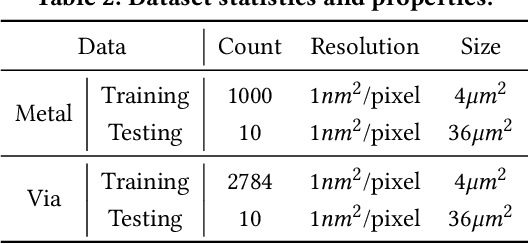

Machine learning techniques have been extensively studied for mask optimization problems, aiming at better mask printability, shorter turnaround time, better mask manufacturability, and so on. However, most of these researches are focusing on the initial solution generation of small design regions. To further realize the potential of machine learning techniques on mask optimization tasks, we present a Convolutional Fourier Neural Operator (CFNO) that can efficiently learn layout tile dependencies and hence promise stitch-less large-scale mask optimization with the limited intervention of legacy tools. We discover the possibility of litho-guided self-training (LGST) through a trained machine learning model when solving non-convex optimization problems, which allows iterative model and dataset update and brings significant model performance improvement. Experimental results show that, for the first time, our machine learning-based framework outperforms state-of-the-art academic numerical mask optimizers with an order of magnitude speedup.
Langevin Monte Carlo for Contextual Bandits
Jun 22, 2022
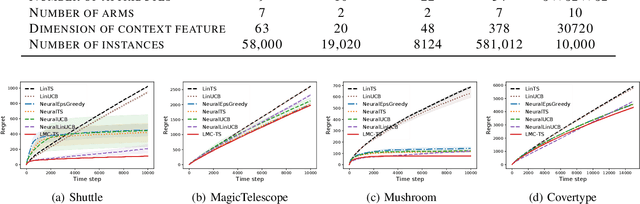
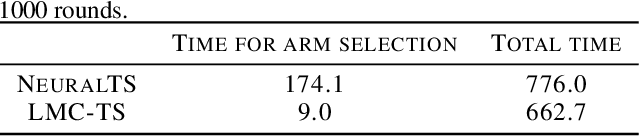
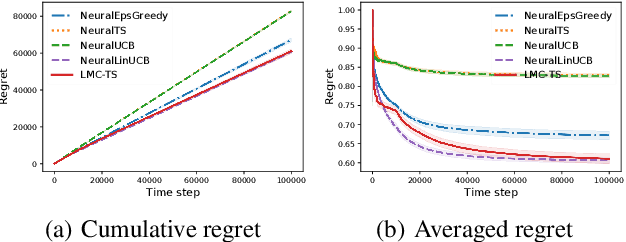
We study the efficiency of Thompson sampling for contextual bandits. Existing Thompson sampling-based algorithms need to construct a Laplace approximation (i.e., a Gaussian distribution) of the posterior distribution, which is inefficient to sample in high dimensional applications for general covariance matrices. Moreover, the Gaussian approximation may not be a good surrogate for the posterior distribution for general reward generating functions. We propose an efficient posterior sampling algorithm, viz., Langevin Monte Carlo Thompson Sampling (LMC-TS), that uses Markov Chain Monte Carlo (MCMC) methods to directly sample from the posterior distribution in contextual bandits. Our method is computationally efficient since it only needs to perform noisy gradient descent updates without constructing the Laplace approximation of the posterior distribution. We prove that the proposed algorithm achieves the same sublinear regret bound as the best Thompson sampling algorithms for a special case of contextual bandits, viz., linear contextual bandits. We conduct experiments on both synthetic data and real-world datasets on different contextual bandit models, which demonstrates that directly sampling from the posterior is both computationally efficient and competitive in performance.
MineDojo: Building Open-Ended Embodied Agents with Internet-Scale Knowledge
Jun 17, 2022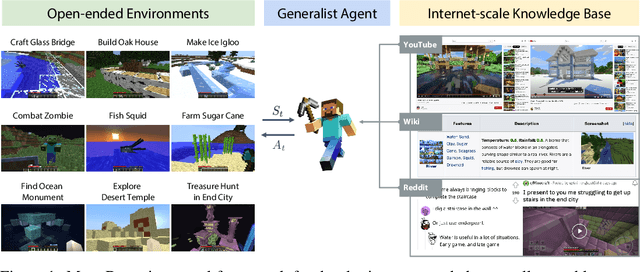
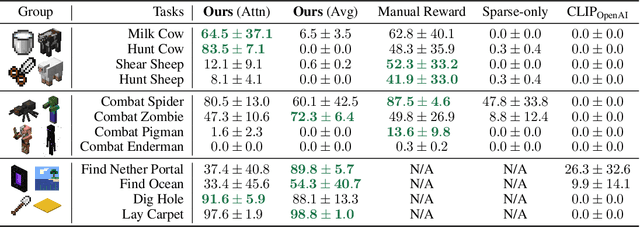
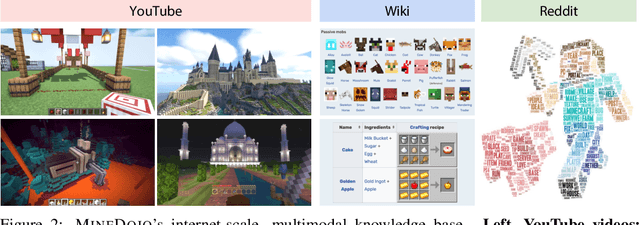

Autonomous agents have made great strides in specialist domains like Atari games and Go. However, they typically learn tabula rasa in isolated environments with limited and manually conceived objectives, thus failing to generalize across a wide spectrum of tasks and capabilities. Inspired by how humans continually learn and adapt in the open world, we advocate a trinity of ingredients for building generalist agents: 1) an environment that supports a multitude of tasks and goals, 2) a large-scale database of multimodal knowledge, and 3) a flexible and scalable agent architecture. We introduce MineDojo, a new framework built on the popular Minecraft game that features a simulation suite with thousands of diverse open-ended tasks and an internet-scale knowledge base with Minecraft videos, tutorials, wiki pages, and forum discussions. Using MineDojo's data, we propose a novel agent learning algorithm that leverages large pre-trained video-language models as a learned reward function. Our agent is able to solve a variety of open-ended tasks specified in free-form language without any manually designed dense shaping reward. We open-source the simulation suite and knowledge bases (https://minedojo.org) to promote research towards the goal of generally capable embodied agents.
Thompson Sampling Achieves $\tilde O$ Regret in Linear Quadratic Control
Jun 17, 2022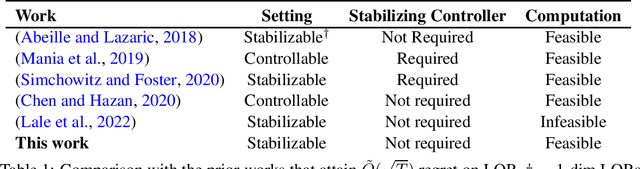
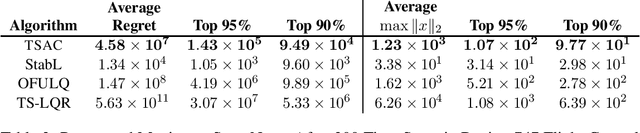
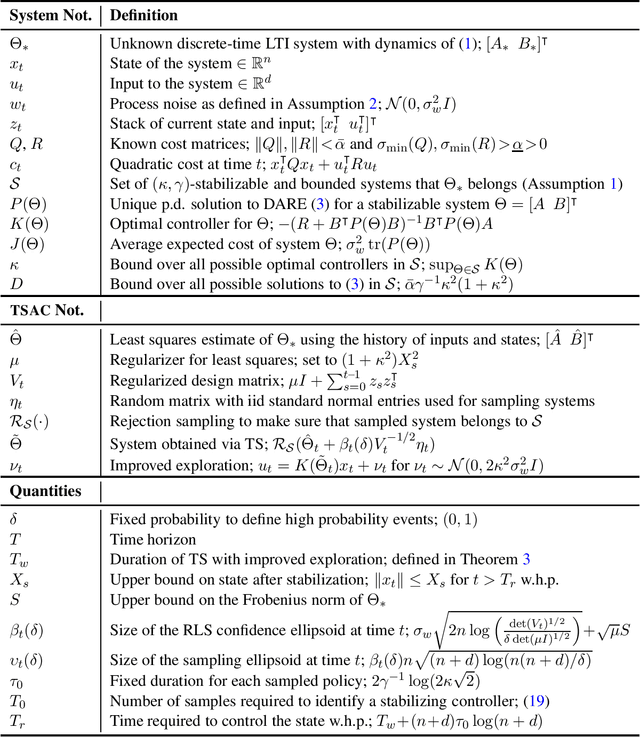
Thompson Sampling (TS) is an efficient method for decision-making under uncertainty, where an action is sampled from a carefully prescribed distribution which is updated based on the observed data. In this work, we study the problem of adaptive control of stabilizable linear-quadratic regulators (LQRs) using TS, where the system dynamics are unknown. Previous works have established that $\tilde O(\sqrt{T})$ frequentist regret is optimal for the adaptive control of LQRs. However, the existing methods either work only in restrictive settings, require a priori known stabilizing controllers, or utilize computationally intractable approaches. We propose an efficient TS algorithm for the adaptive control of LQRs, TS-based Adaptive Control, TSAC, that attains $\tilde O(\sqrt{T})$ regret, even for multidimensional systems, thereby solving the open problem posed in Abeille and Lazaric (2018). TSAC does not require a priori known stabilizing controller and achieves fast stabilization of the underlying system by effectively exploring the environment in the early stages. Our result hinges on developing a novel lower bound on the probability that the TS provides an optimistic sample. By carefully prescribing an early exploration strategy and a policy update rule, we show that TS achieves order-optimal regret in adaptive control of multidimensional stabilizable LQRs. We empirically demonstrate the performance and the efficiency of TSAC in several adaptive control tasks.
Finite-Time Regret of Thompson Sampling Algorithms for Exponential Family Multi-Armed Bandits
Jun 07, 2022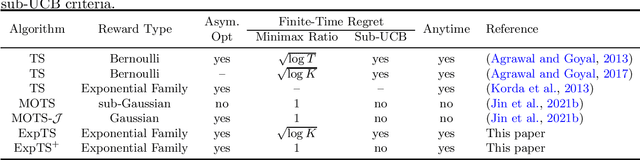
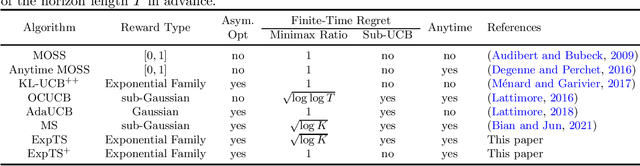
We study the regret of Thompson sampling (TS) algorithms for exponential family bandits, where the reward distribution is from a one-dimensional exponential family, which covers many common reward distributions including Bernoulli, Gaussian, Gamma, Exponential, etc. We propose a Thompson sampling algorithm, termed ExpTS, which uses a novel sampling distribution to avoid the under-estimation of the optimal arm. We provide a tight regret analysis for ExpTS, which simultaneously yields both the finite-time regret bound as well as the asymptotic regret bound. In particular, for a $K$-armed bandit with exponential family rewards, ExpTS over a horizon $T$ is sub-UCB (a strong criterion for the finite-time regret that is problem-dependent), minimax optimal up to a factor $\sqrt{\log K}$, and asymptotically optimal, for exponential family rewards. Moreover, we propose ExpTS$^+$, by adding a greedy exploitation step in addition to the sampling distribution used in ExpTS, to avoid the over-estimation of sub-optimal arms. ExpTS$^+$ is an anytime bandit algorithm and achieves the minimax optimality and asymptotic optimality simultaneously for exponential family reward distributions. Our proof techniques are general and conceptually simple and can be easily applied to analyze standard Thompson sampling with specific reward distributions.
KCRL: Krasovskii-Constrained Reinforcement Learning with Guaranteed Stability in Nonlinear Dynamical Systems
Jun 03, 2022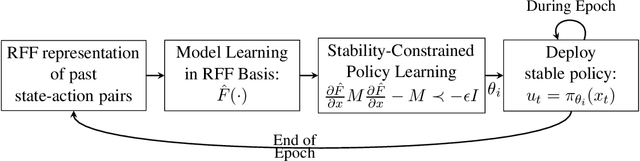
Learning a dynamical system requires stabilizing the unknown dynamics to avoid state blow-ups. However, current reinforcement learning (RL) methods lack stabilization guarantees, which limits their applicability for the control of safety-critical systems. We propose a model-based RL framework with formal stability guarantees, Krasovskii Constrained RL (KCRL), that adopts Krasovskii's family of Lyapunov functions as a stability constraint. The proposed method learns the system dynamics up to a confidence interval using feature representation, e.g. Random Fourier Features. It then solves a constrained policy optimization problem with a stability constraint based on Krasovskii's method using a primal-dual approach to recover a stabilizing policy. We show that KCRL is guaranteed to learn a stabilizing policy in a finite number of interactions with the underlying unknown system. We also derive the sample complexity upper bound for stabilization of unknown nonlinear dynamical systems via the KCRL framework.
Bongard-HOI: Benchmarking Few-Shot Visual Reasoning for Human-Object Interactions
May 27, 2022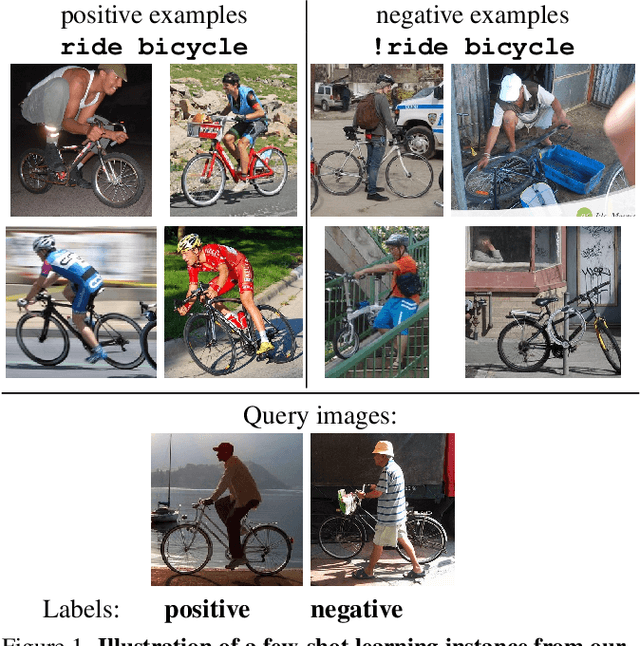
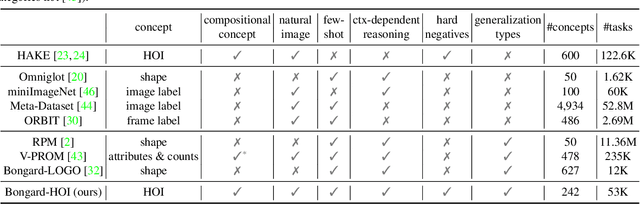

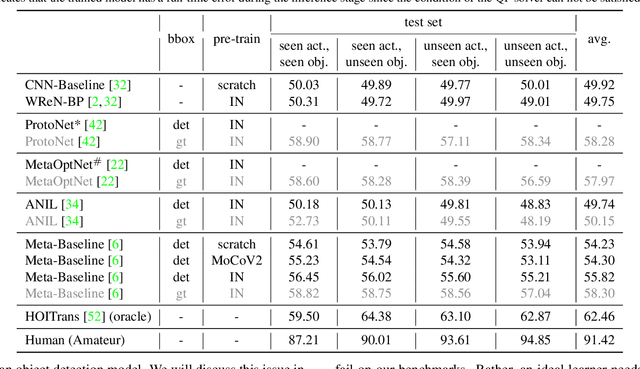
A significant gap remains between today's visual pattern recognition models and human-level visual cognition especially when it comes to few-shot learning and compositional reasoning of novel concepts. We introduce Bongard-HOI, a new visual reasoning benchmark that focuses on compositional learning of human-object interactions (HOIs) from natural images. It is inspired by two desirable characteristics from the classical Bongard problems (BPs): 1) few-shot concept learning, and 2) context-dependent reasoning. We carefully curate the few-shot instances with hard negatives, where positive and negative images only disagree on action labels, making mere recognition of object categories insufficient to complete our benchmarks. We also design multiple test sets to systematically study the generalization of visual learning models, where we vary the overlap of the HOI concepts between the training and test sets of few-shot instances, from partial to no overlaps. Bongard-HOI presents a substantial challenge to today's visual recognition models. The state-of-the-art HOI detection model achieves only 62% accuracy on few-shot binary prediction while even amateur human testers on MTurk have 91% accuracy. With the Bongard-HOI benchmark, we hope to further advance research efforts in visual reasoning, especially in holistic perception-reasoning systems and better representation learning.
Diffusion Models for Adversarial Purification
May 16, 2022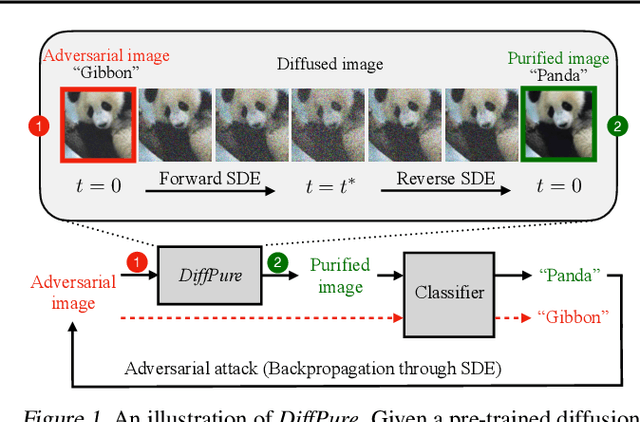
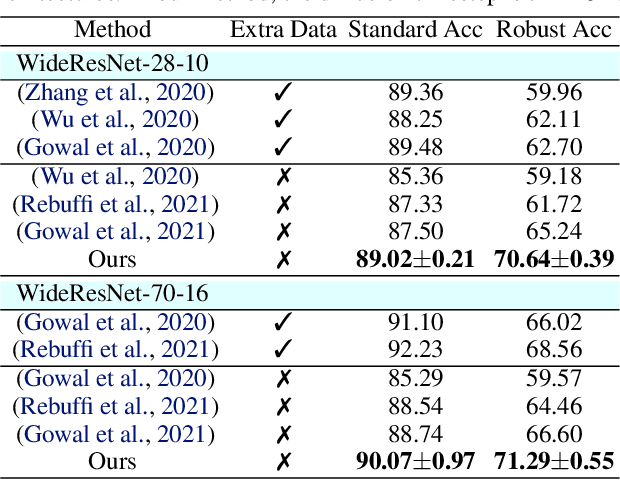

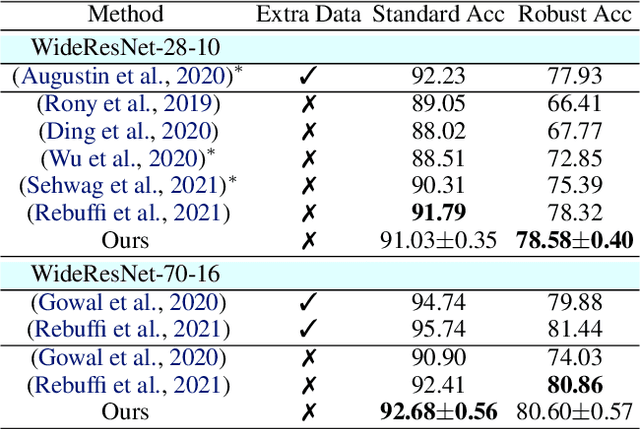
Adversarial purification refers to a class of defense methods that remove adversarial perturbations using a generative model. These methods do not make assumptions on the form of attack and the classification model, and thus can defend pre-existing classifiers against unseen threats. However, their performance currently falls behind adversarial training methods. In this work, we propose DiffPure that uses diffusion models for adversarial purification: Given an adversarial example, we first diffuse it with a small amount of noise following a forward diffusion process, and then recover the clean image through a reverse generative process. To evaluate our method against strong adaptive attacks in an efficient and scalable way, we propose to use the adjoint method to compute full gradients of the reverse generative process. Extensive experiments on three image datasets including CIFAR-10, ImageNet and CelebA-HQ with three classifier architectures including ResNet, WideResNet and ViT demonstrate that our method achieves the state-of-the-art results, outperforming current adversarial training and adversarial purification methods, often by a large margin. Project page: https://diffpure.github.io.
Neural-Fly Enables Rapid Learning for Agile Flight in Strong Winds
May 13, 2022Executing safe and precise flight maneuvers in dynamic high-speed winds is important for the ongoing commoditization of uninhabited aerial vehicles (UAVs). However, because the relationship between various wind conditions and its effect on aircraft maneuverability is not well understood, it is challenging to design effective robot controllers using traditional control design methods. We present Neural-Fly, a learning-based approach that allows rapid online adaptation by incorporating pretrained representations through deep learning. Neural-Fly builds on two key observations that aerodynamics in different wind conditions share a common representation and that the wind-specific part lies in a low-dimensional space. To that end, Neural-Fly uses a proposed learning algorithm, domain adversarially invariant meta-learning (DAIML), to learn the shared representation, only using 12 minutes of flight data. With the learned representation as a basis, Neural-Fly then uses a composite adaptation law to update a set of linear coefficients for mixing the basis elements. When evaluated under challenging wind conditions generated with the Caltech Real Weather Wind Tunnel, with wind speeds up to 43.6 kilometers/hour (12.1 meters/second), Neural-Fly achieves precise flight control with substantially smaller tracking error than state-of-the-art nonlinear and adaptive controllers. In addition to strong empirical performance, the exponential stability of Neural-Fly results in robustness guarantees. Last, our control design extrapolates to unseen wind conditions, is shown to be effective for outdoor flights with only onboard sensors, and can transfer across drones with minimal performance degradation.