 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScaling up fine-grained intracranial vessel annotations in computed tomography angiography
Jun 19, 2026In this work, we present SemanticVessel, a dataset for fine-grained brain vessel segmentation in computed tomography angiography scans. Based on the detailed contrast provided by dynamic 4D-CTA scans, we generate segmentation traces for arteries and veins. We then use intensity-guided region growing to obtain segmentations of the majority of vascular territories in the human brain, which are refined and annotated with 20 unique arterial classes by an expert radiologist. Unlike existing datasets, where minor arteries are discarded as background content, we merge these minor arteries into a generic arterial class. Due to the multiple-phase acquisition of dynamic 4D-CTA, labels for a single phase can be re-used for other phases in the same series, greatly increasing the size of our dataset with no additional annotation cost. The results show that models trained with the additional generic artery class produce better fine-grained segmentations across the board. We will make our code, annotation GUI, and model weights available to the scientific community. Code, weights, and data will be made available on https://github.com/alceballosa/robust-vessel-segmentation
Streaming Video Generation with Streaming Force Control
Jun 05, 2026We introduce StreamForce, a streaming video generation framework that enables physically grounded control through continuous force inputs. Unlike prior video models that train separate models for different force types, assume fixed forces, or rely on non-causal processing, StreamForce is a causal and unified model that responds instantly and coherently to both local and global, time-varying forces. To achieve this, we design a unified force representation as a control signal and develop a distillation pipeline for force-controllable video generation. Our model combines autoregressive efficiency with force responsiveness, sustaining stable photometric and dynamic realism. StreamForce runs at up to 16.6 FPS on a single GPU, achieving state-of-the-art performance in both force adherence and motion realism. Project website: https://neu-vi.github.io/StreamForce/
UniCorrn: Unified Correspondence Transformer Across 2D and 3D
May 05, 2026Visual correspondence across image-to-image (2D-2D), image-to-point cloud (2D-3D), and point cloud-to-point cloud (3D-3D) geometric matching forms the foundation for numerous 3D vision tasks. Despite sharing a similar problem structure, current methods use task-specific designs with separate models for each modality combination. We present UniCorrn, the first correspondence model with shared weights that unifies geometric matching across all three tasks. Our key insight is that Transformer attention naturally captures cross-modal feature similarity. We propose a dual-stream decoder that maintains separate appearance and positional feature streams. This design enables end-to-end learning through stack-able layers while supporting flexible query-based correspondence estimation across heterogeneous modalities. Our architecture employs modality-specific backbones followed by shared encoder and decoder components, trained jointly on diverse data combining pseudo point clouds from depth maps with real 3D correspondence annotations. UniCorrn achieves competitive performance on 2D-2D matching and surpasses prior state-of-the-art by 8% on 7Scenes (2D-3D) and 10% on 3DLoMatch (3D-3D) in registration recall. Project website: https://neu-vi.github.io/UniCorrn
Robust automatic brain vessel segmentation in 3D CTA scans using dynamic 4D-CTA data
Jan 30, 2026In this study, we develop a novel methodology for annotating the brain vasculature using dynamic 4D-CTA head scans. By using multiple time points from dynamic CTA acquisitions, we subtract bone and soft tissue to enhance the visualization of arteries and veins, reducing the effort required to obtain manual annotations of brain vessels. We then train deep learning models on our ground truth annotations by using the same segmentation for multiple phases from the dynamic 4D-CTA collection, effectively enlarging our dataset by 4 to 5 times and inducing robustness to contrast phases. In total, our dataset comprises 110 training images from 25 patients and 165 test images from 14 patients. In comparison with two similarly-sized datasets for CTA-based brain vessel segmentation, a nnUNet model trained on our dataset can achieve significantly better segmentations across all vascular regions, with an average mDC of 0.846 for arteries and 0.957 for veins in the TopBrain dataset. Furthermore, metrics such as average directed Hausdorff distance (adHD) and topology sensitivity (tSens) reflected similar trends: using our dataset resulted in low error margins (aDHD of 0.304 mm for arteries and 0.078 for veins) and high sensitivity (tSens of 0.877 for arteries and 0.974 for veins), indicating excellent accuracy in capturing vessel morphology. Our code and model weights are available online: https://github.com/alceballosa/robust-vessel-segmentation
LASER: Layer-wise Scale Alignment for Training-Free Streaming 4D Reconstruction
Dec 15, 2025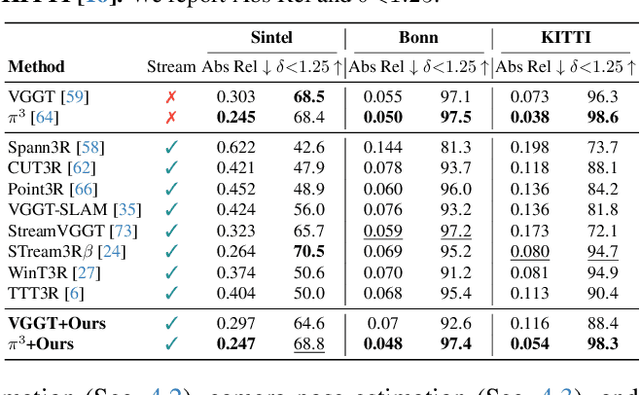
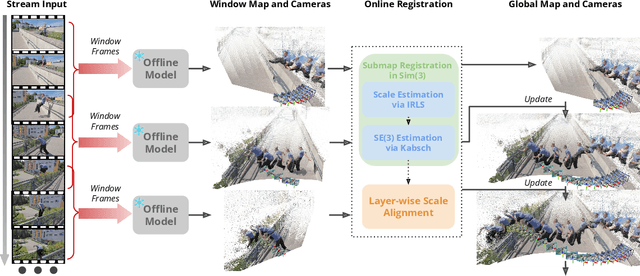
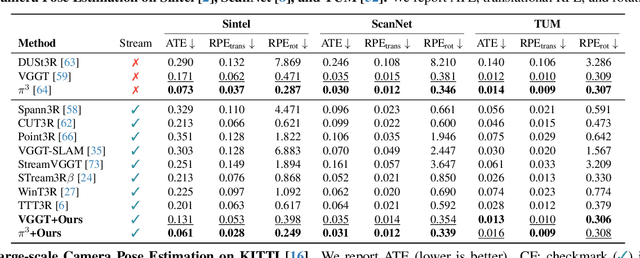
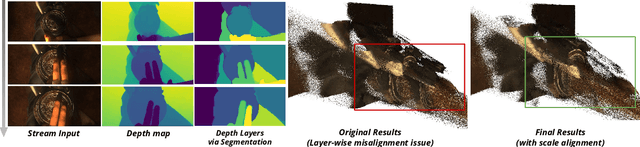
Recent feed-forward reconstruction models like VGGT and $π^3$ achieve impressive reconstruction quality but cannot process streaming videos due to quadratic memory complexity, limiting their practical deployment. While existing streaming methods address this through learned memory mechanisms or causal attention, they require extensive retraining and may not fully leverage the strong geometric priors of state-of-the-art offline models. We propose LASER, a training-free framework that converts an offline reconstruction model into a streaming system by aligning predictions across consecutive temporal windows. We observe that simple similarity transformation ($\mathrm{Sim}(3)$) alignment fails due to layer depth misalignment: monocular scale ambiguity causes relative depth scales of different scene layers to vary inconsistently between windows. To address this, we introduce layer-wise scale alignment, which segments depth predictions into discrete layers, computes per-layer scale factors, and propagates them across both adjacent windows and timestamps. Extensive experiments show that LASER achieves state-of-the-art performance on camera pose estimation and point map reconstruction %quality with offline models while operating at 14 FPS with 6 GB peak memory on a RTX A6000 GPU, enabling practical deployment for kilometer-scale streaming videos. Project website: $\href{https://neu-vi.github.io/LASER/}{\texttt{https://neu-vi.github.io/LASER/}}$
Automated anatomy-based post-processing reduces false positives and improved interpretability of deep learning intracranial aneurysm detection
Jul 01, 2025Introduction: Deep learning (DL) models can help detect intracranial aneurysms on CTA, but high false positive (FP) rates remain a barrier to clinical translation, despite improvement in model architectures and strategies like detection threshold tuning. We employed an automated, anatomy-based, heuristic-learning hybrid artery-vein segmentation post-processing method to further reduce FPs. Methods: Two DL models, CPM-Net and a deformable 3D convolutional neural network-transformer hybrid (3D-CNN-TR), were trained with 1,186 open-source CTAs (1,373 annotated aneurysms), and evaluated with 143 held-out private CTAs (218 annotated aneurysms). Brain, artery, vein, and cavernous venous sinus (CVS) segmentation masks were applied to remove possible FPs in the DL outputs that overlapped with: (1) brain mask; (2) vein mask; (3) vein more than artery masks; (4) brain plus vein mask; (5) brain plus vein more than artery masks. Results: CPM-Net yielded 139 true-positives (TP); 79 false-negative (FN); 126 FP. 3D-CNN-TR yielded 179 TP; 39 FN; 182 FP. FPs were commonly extracranial (CPM-Net 27.3%; 3D-CNN-TR 42.3%), venous (CPM-Net 56.3%; 3D-CNN-TR 29.1%), arterial (CPM-Net 11.9%; 3D-CNN-TR 53.3%), and non-vascular (CPM-Net 25.4%; 3D-CNN-TR 9.3%) structures. Method 5 performed best, reducing CPM-Net FP by 70.6% (89/126) and 3D-CNN-TR FP by 51.6% (94/182), without reducing TP, lowering the FP/case rate from 0.88 to 0.26 for CPM-NET, and from 1.27 to 0.62 for the 3D-CNN-TR. Conclusion: Anatomy-based, interpretable post-processing can improve DL-based aneurysm detection model performance. More broadly, automated, domain-informed, hybrid heuristic-learning processing holds promise for improving the performance and clinical acceptance of aneurysm detection models.
Struct2D: A Perception-Guided Framework for Spatial Reasoning in Large Multimodal Models
Jun 04, 2025Unlocking spatial reasoning in Large Multimodal Models (LMMs) is crucial for enabling intelligent interaction with 3D environments. While prior efforts often rely on explicit 3D inputs or specialized model architectures, we ask: can LMMs reason about 3D space using only structured 2D representations derived from perception? We introduce Struct2D, a perception-guided prompting framework that combines bird's-eye-view (BEV) images with object marks and object-centric metadata, optionally incorporating egocentric keyframes when needed. Using Struct2D, we conduct an in-depth zero-shot analysis of closed-source LMMs (e.g., GPT-o3) and find that they exhibit surprisingly strong spatial reasoning abilities when provided with structured 2D inputs, effectively handling tasks such as relative direction estimation and route planning. Building on these insights, we construct Struct2D-Set, a large-scale instruction tuning dataset with 200K fine-grained QA pairs across eight spatial reasoning categories, generated automatically from 3D indoor scenes. We fine-tune an open-source LMM (Qwen2.5VL) on Struct2D-Set, achieving competitive performance on multiple benchmarks, including 3D question answering, dense captioning, and object grounding. Our approach demonstrates that structured 2D inputs can effectively bridge perception and language reasoning in LMMs-without requiring explicit 3D representations as input. We will release both our code and dataset to support future research.
Absolute Coordinates Make Motion Generation Easy
May 26, 2025State-of-the-art text-to-motion generation models rely on the kinematic-aware, local-relative motion representation popularized by HumanML3D, which encodes motion relative to the pelvis and to the previous frame with built-in redundancy. While this design simplifies training for earlier generation models, it introduces critical limitations for diffusion models and hinders applicability to downstream tasks. In this work, we revisit the motion representation and propose a radically simplified and long-abandoned alternative for text-to-motion generation: absolute joint coordinates in global space. Through systematic analysis of design choices, we show that this formulation achieves significantly higher motion fidelity, improved text alignment, and strong scalability, even with a simple Transformer backbone and no auxiliary kinematic-aware losses. Moreover, our formulation naturally supports downstream tasks such as text-driven motion control and temporal/spatial editing without additional task-specific reengineering and costly classifier guidance generation from control signals. Finally, we demonstrate promising generalization to directly generate SMPL-H mesh vertices in motion from text, laying a strong foundation for future research and motion-related applications.
SV4D 2.0: Enhancing Spatio-Temporal Consistency in Multi-View Video Diffusion for High-Quality 4D Generation
Mar 21, 2025



We present Stable Video 4D 2.0 (SV4D 2.0), a multi-view video diffusion model for dynamic 3D asset generation. Compared to its predecessor SV4D, SV4D 2.0 is more robust to occlusions and large motion, generalizes better to real-world videos, and produces higher-quality outputs in terms of detail sharpness and spatio-temporal consistency. We achieve this by introducing key improvements in multiple aspects: 1) network architecture: eliminating the dependency of reference multi-views and designing blending mechanism for 3D and frame attention, 2) data: enhancing quality and quantity of training data, 3) training strategy: adopting progressive 3D-4D training for better generalization, and 4) 4D optimization: handling 3D inconsistency and large motion via 2-stage refinement and progressive frame sampling. Extensive experiments demonstrate significant performance gain by SV4D 2.0 both visually and quantitatively, achieving better detail (-14\% LPIPS) and 4D consistency (-44\% FV4D) in novel-view video synthesis and 4D optimization (-12\% LPIPS and -24\% FV4D) compared to SV4D.
Anatomically-guided masked autoencoder pre-training for aneurysm detection
Feb 28, 2025Intracranial aneurysms are a major cause of morbidity and mortality worldwide, and detecting them manually is a complex, time-consuming task. Albeit automated solutions are desirable, the limited availability of training data makes it difficult to develop such solutions using typical supervised learning frameworks. In this work, we propose a novel pre-training strategy using more widely available unannotated head CT scan data to pre-train a 3D Vision Transformer model prior to fine-tuning for the aneurysm detection task. Specifically, we modify masked auto-encoder (MAE) pre-training in the following ways: we use a factorized self-attention mechanism to make 3D attention computationally viable, we restrict the masked patches to areas near arteries to focus on areas where aneurysms are likely to occur, and we reconstruct not only CT scan intensity values but also artery distance maps, which describe the distance between each voxel and the closest artery, thereby enhancing the backbone's learned representations. Compared with SOTA aneurysm detection models, our approach gains +4-8% absolute Sensitivity at a false positive rate of 0.5. Code and weights will be released.