 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Information": models, code, and papers
Language-Guided 3D Object Detection in Point Cloud for Autonomous Driving
May 25, 2023
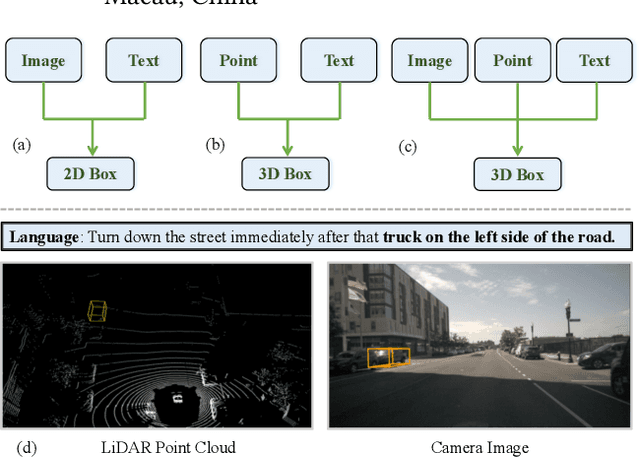
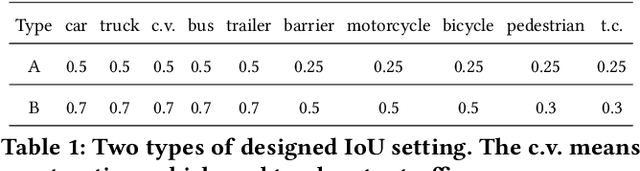
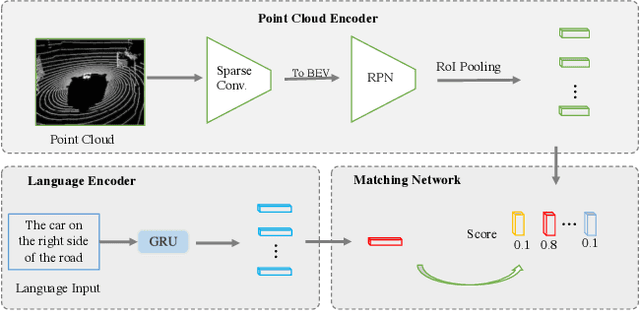
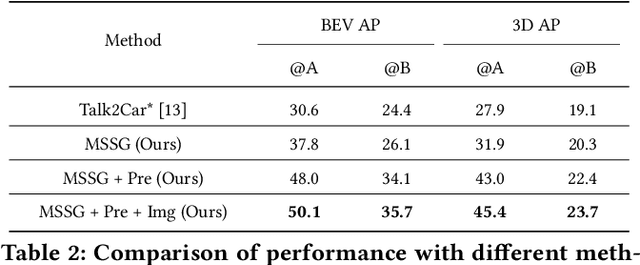
This paper addresses the problem of 3D referring expression comprehension (REC) in autonomous driving scenario, which aims to ground a natural language to the targeted region in LiDAR point clouds. Previous approaches for REC usually focus on the 2D or 3D-indoor domain, which is not suitable for accurately predicting the location of the queried 3D region in an autonomous driving scene. In addition, the upper-bound limitation and the heavy computation cost motivate us to explore a better solution. In this work, we propose a new multi-modal visual grounding task, termed LiDAR Grounding. Then we devise a Multi-modal Single Shot Grounding (MSSG) approach with an effective token fusion strategy. It jointly learns the LiDAR-based object detector with the language features and predicts the targeted region directly from the detector without any post-processing. Moreover, the image feature can be flexibly integrated into our approach to provide rich texture and color information. The cross-modal learning enforces the detector to concentrate on important regions in the point cloud by considering the informative language expressions, thus leading to much better accuracy and efficiency. Extensive experiments on the Talk2Car dataset demonstrate the effectiveness of the proposed methods. Our work offers a deeper insight into the LiDAR-based grounding task and we expect it presents a promising direction for the autonomous driving community.
RoLA: A Real-Time Online Lightweight Anomaly Detection System for Multivariate Time Series
May 25, 2023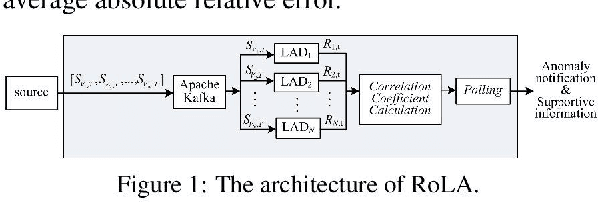

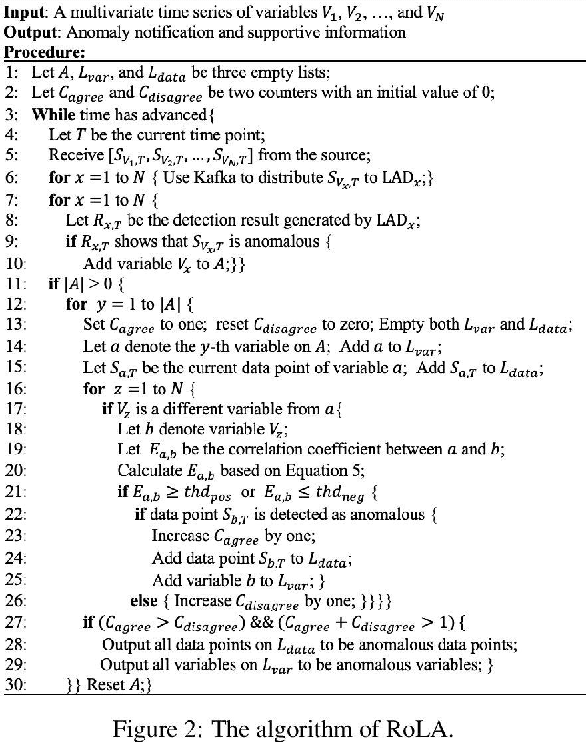
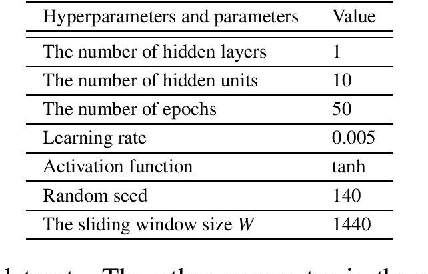
A multivariate time series refers to observations of two or more variables taken from a device or a system simultaneously over time. There is an increasing need to monitor multivariate time series and detect anomalies in real time to ensure proper system operation and good service quality. It is also highly desirable to have a lightweight anomaly detection system that considers correlations between different variables, adapts to changes in the pattern of the multivariate time series, offers immediate responses, and provides supportive information regarding detection results based on unsupervised learning and online model training. In the past decade, many multivariate time series anomaly detection approaches have been introduced. However, they are unable to offer all the above-mentioned features. In this paper, we propose RoLA, a real-time online lightweight anomaly detection system for multivariate time series based on a divide-and-conquer strategy, parallel processing, and the majority rule. RoLA employs multiple lightweight anomaly detectors to monitor multivariate time series in parallel, determine the correlations between variables dynamically on the fly, and then jointly detect anomalies based on the majority rule in real time. To demonstrate the performance of RoLA, we conducted an experiment based on a public dataset provided by the FerryBox of the One Ocean Expedition. The results show that RoLA provides satisfactory detection accuracy and lightweight performance.
SketchOGD: Memory-Efficient Continual Learning
May 25, 2023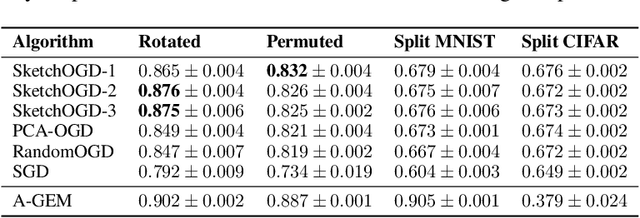
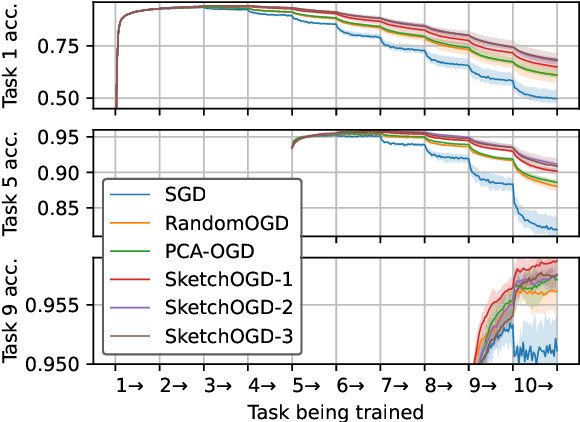
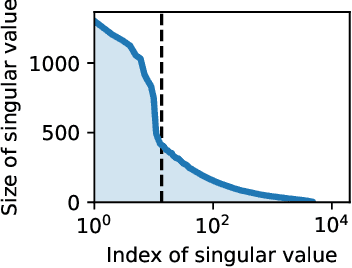
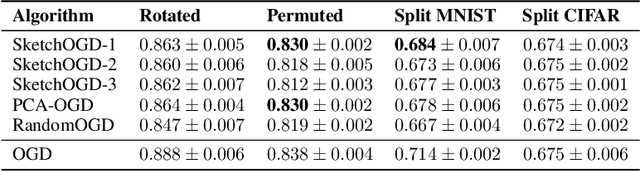
When machine learning models are trained continually on a sequence of tasks, they are liable to forget what they learned on previous tasks -- a phenomenon known as catastrophic forgetting. Proposed solutions to catastrophic forgetting tend to involve storing information about past tasks, meaning that memory usage is a chief consideration in determining their practicality. This paper proposes a memory-efficient solution to catastrophic forgetting, improving upon an established algorithm known as orthogonal gradient descent (OGD). OGD utilizes prior model gradients to find weight updates that preserve performance on prior datapoints. However, since the memory cost of storing prior model gradients grows with the runtime of the algorithm, OGD is ill-suited to continual learning over arbitrarily long time horizons. To address this problem, this paper proposes SketchOGD. SketchOGD employs an online sketching algorithm to compress model gradients as they are encountered into a matrix of a fixed, user-determined size. In contrast to existing memory-efficient variants of OGD, SketchOGD runs online without the need for advance knowledge of the total number of tasks, is simple to implement, and is more amenable to analysis. We provide theoretical guarantees on the approximation error of the relevant sketches under a novel metric suited to the downstream task of OGD. Experimentally, we find that SketchOGD tends to outperform current state-of-the-art variants of OGD given a fixed memory budget.
Union Subgraph Neural Networks
May 25, 2023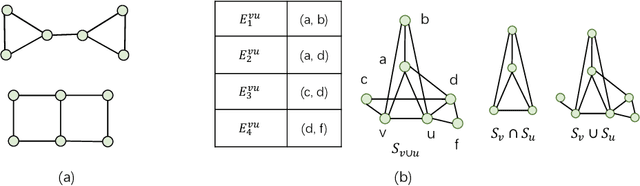
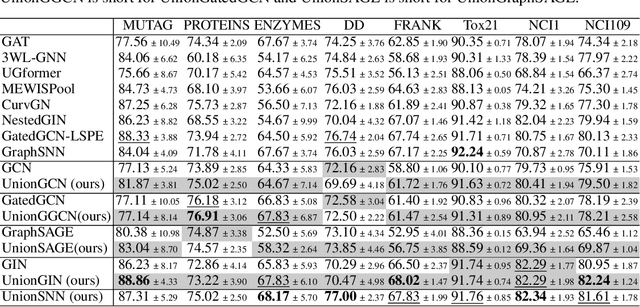

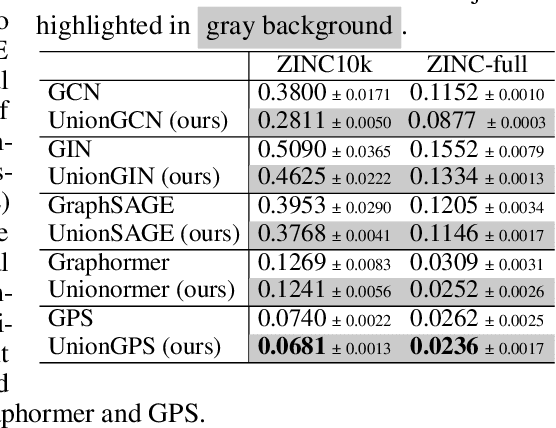
Graph Neural Networks (GNNs) are widely used for graph representation learning in many application domains. The expressiveness of vanilla GNNs is upper-bounded by 1-dimensional Weisfeiler-Leman (1-WL) test as they operate on rooted subtrees through iterative message passing. In this paper, we empower GNNs by injecting neighbor-connectivity information extracted from a new type of substructure. We first investigate different kinds of connectivities existing in a local neighborhood and identify a substructure called union subgraph, which is able to capture the complete picture of the 1-hop neighborhood of an edge. We then design a shortest-path-based substructure descriptor that possesses three nice properties and can effectively encode the high-order connectivities in union subgraphs. By infusing the encoded neighbor connectivities, we propose a novel model, namely Union Subgraph Neural Network (UnionSNN), which is proven to be strictly more powerful than 1-WL in distinguishing non-isomorphic graphs. Additionally, the local encoding from union subgraphs can also be injected into arbitrary message-passing neural networks (MPNNs) and Transformer-based models as a plugin. Extensive experiments on 17 benchmarks of both graph-level and node-level tasks demonstrate that UnionSNN outperforms state-of-the-art baseline models, with competitive computational efficiency. The injection of our local encoding to existing models is able to boost the performance by up to 11.09%.
Multimodal Graph Transformer for Multimodal Question Answering
Apr 30, 2023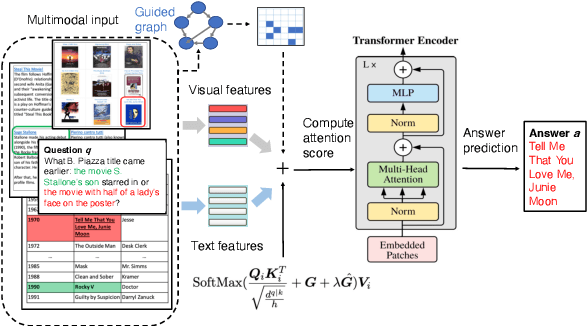
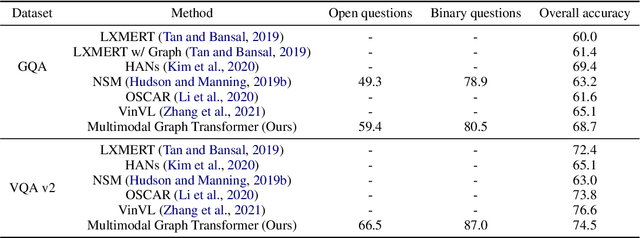
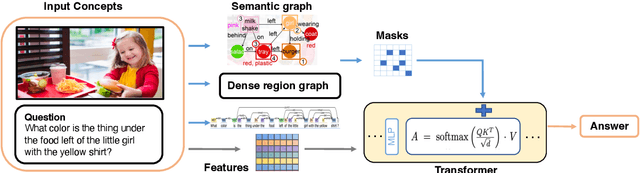
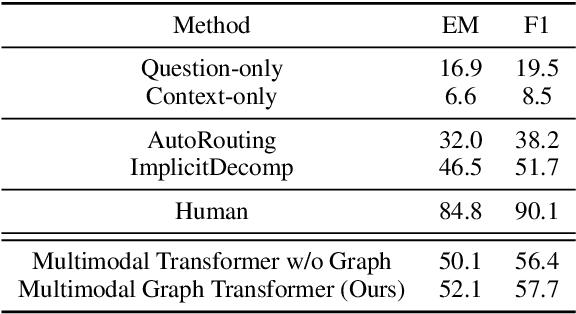
Despite the success of Transformer models in vision and language tasks, they often learn knowledge from enormous data implicitly and cannot utilize structured input data directly. On the other hand, structured learning approaches such as graph neural networks (GNNs) that integrate prior information can barely compete with Transformer models. In this work, we aim to benefit from both worlds and propose a novel Multimodal Graph Transformer for question answering tasks that requires performing reasoning across multiple modalities. We introduce a graph-involved plug-and-play quasi-attention mechanism to incorporate multimodal graph information, acquired from text and visual data, to the vanilla self-attention as effective prior. In particular, we construct the text graph, dense region graph, and semantic graph to generate adjacency matrices, and then compose them with input vision and language features to perform downstream reasoning. Such a way of regularizing self-attention with graph information significantly improves the inferring ability and helps align features from different modalities. We validate the effectiveness of Multimodal Graph Transformer over its Transformer baselines on GQA, VQAv2, and MultiModalQA datasets.
Self-Supervised Learning of Action Affordances as Interaction Modes
May 27, 2023

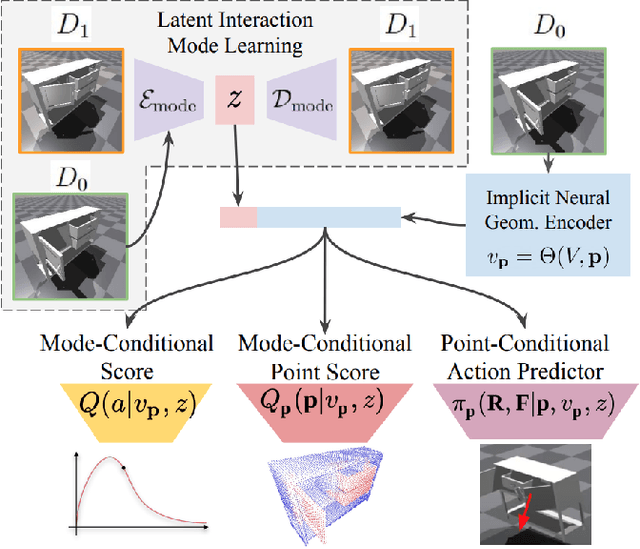
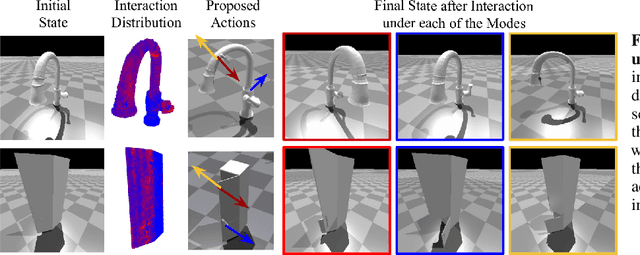
When humans perform a task with an articulated object, they interact with the object only in a handful of ways, while the space of all possible interactions is nearly endless. This is because humans have prior knowledge about what interactions are likely to be successful, i.e., to open a new door we first try the handle. While learning such priors without supervision is easy for humans, it is notoriously hard for machines. In this work, we tackle unsupervised learning of priors of useful interactions with articulated objects, which we call interaction modes. In contrast to the prior art, we use no supervision or privileged information; we only assume access to the depth sensor in the simulator to learn the interaction modes. More precisely, we define a successful interaction as the one changing the visual environment substantially and learn a generative model of such interactions, that can be conditioned on the desired goal state of the object. In our experiments, we show that our model covers most of the human interaction modes, outperforms existing state-of-the-art methods for affordance learning, and can generalize to objects never seen during training. Additionally, we show promising results in the goal-conditional setup, where our model can be quickly fine-tuned to perform a given task. We show in the experiments that such affordance learning predicts interaction which covers most modes of interaction for the querying articulated object and can be fine-tuned to a goal-conditional model. For supplementary: https://actaim.github.io.
Automatic Surround Camera Calibration Method in Road Scene for Self-driving Car
May 26, 2023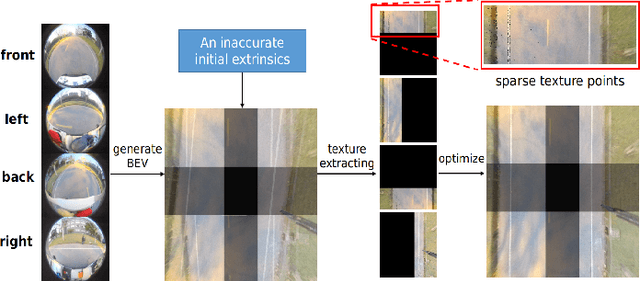
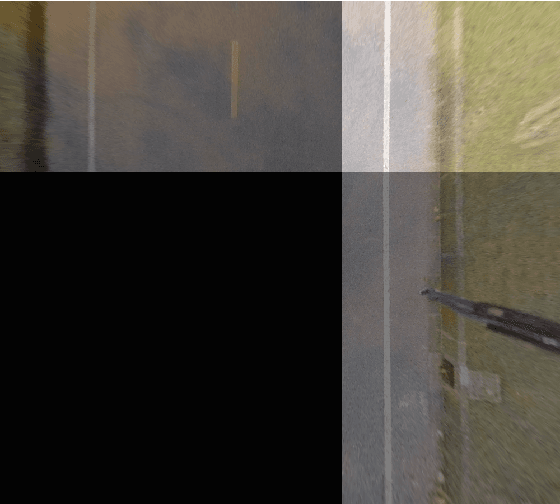
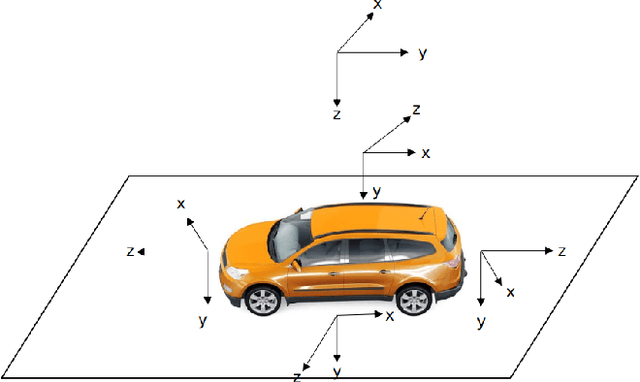
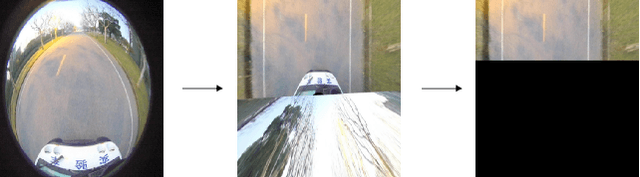
With the development of autonomous driving technology, sensor calibration has become a key technology to achieve accurate perception fusion and localization. Accurate calibration of the sensors ensures that each sensor can function properly and accurate information aggregation can be achieved. Among them, camera calibration based on surround view has received extensive attention. In autonomous driving applications, the calibration accuracy of the camera can directly affect the accuracy of perception and depth estimation. For online calibration of surround-view cameras, traditional feature extraction-based methods will suffer from strong distortion when the initial extrinsic parameters error is large, making these methods less robust and inaccurate. More existing methods use the sparse direct method to calibrate multi-cameras, which can ensure both accuracy and real-time performance and is theoretically achievable. However, this method requires a better initial value, and the initial estimate with a large error is often stuck in a local optimum. To this end, we introduce a robust automatic multi-cameras (pinhole or fisheye cameras) calibration and refinement method in the road scene. We utilize the coarse-to-fine random-search strategy, and it can solve large disturbances of initial extrinsic parameters, which can make up for falling into optimal local value in nonlinear optimization methods. In the end, quantitative and qualitative experiments are conducted in actual and simulated environments, and the result shows the proposed method can achieve accuracy and robustness performance. The open-source code is available at https://github.com/OpenCalib/SurroundCameraCalib.
Higher Order Gauge Equivariant CNNs on Riemannian Manifolds and Applications
May 26, 2023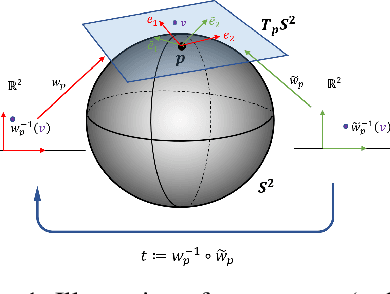
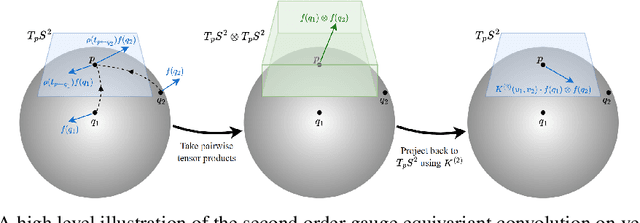
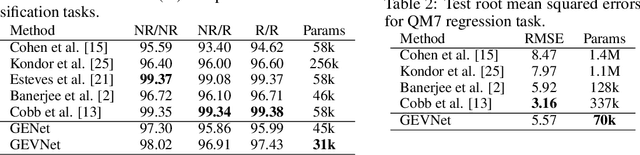
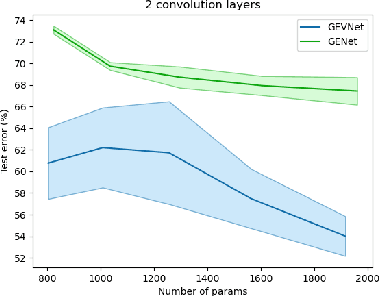
With the advent of group equivariant convolutions in deep networks literature, spherical CNNs with $\mathsf{SO}(3)$-equivariant layers have been developed to cope with data that are samples of signals on the sphere $S^2$. One can implicitly obtain $\mathsf{SO}(3)$-equivariant convolutions on $S^2$ with significant efficiency gains by explicitly requiring gauge equivariance w.r.t. $\mathsf{SO}(2)$. In this paper, we build on this fact by introducing a higher order generalization of the gauge equivariant convolution, whose implementation is dubbed a gauge equivariant Volterra network (GEVNet). This allows us to model spatially extended nonlinear interactions within a given receptive field while still maintaining equivariance to global isometries. We prove theoretical results regarding the equivariance and construction of higher order gauge equivariant convolutions. Then, we empirically demonstrate the parameter efficiency of our model, first on computer vision benchmark data (e.g. spherical MNIST), and then in combination with a convolutional kernel network (CKN) on neuroimaging data. In the neuroimaging data experiments, the resulting two-part architecture (CKN + GEVNet) is used to automatically discriminate between patients with Lewy Body Disease (DLB), Alzheimer's Disease (AD) and Parkinson's Disease (PD) from diffusion magnetic resonance images (dMRI). The GEVNet extracts micro-architectural features within each voxel, while the CKN extracts macro-architectural features across voxels. This compound architecture is uniquely poised to exploit the intra- and inter-voxel information contained in the dMRI data, leading to improved performance over the classification results obtained from either of the individual components.
DiffUTE: Universal Text Editing Diffusion Model
May 19, 2023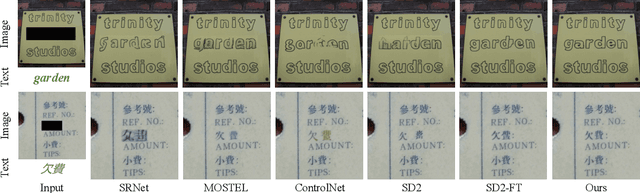
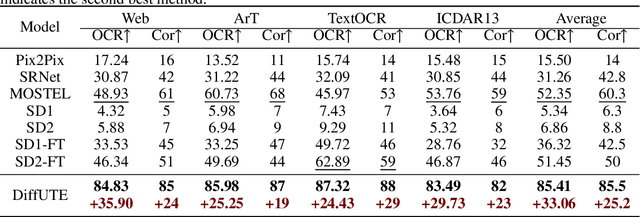
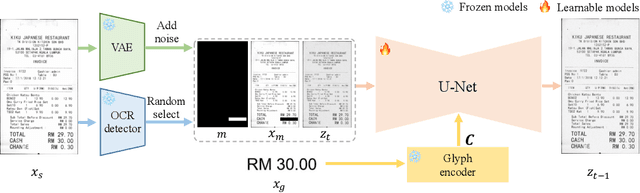
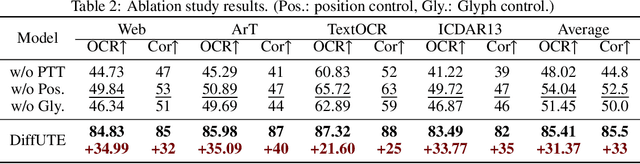
Diffusion model based language-guided image editing has achieved great success recently. However, existing state-of-the-art diffusion models struggle with rendering correct text and text style during generation. To tackle this problem, we propose a universal self-supervised text editing diffusion model (DiffUTE), which aims to replace or modify words in the source image with another one while maintaining its realistic appearance. Specifically, we build our model on a diffusion model and carefully modify the network structure to enable the model for drawing multilingual characters with the help of glyph and position information. Moreover, we design a self-supervised learning framework to leverage large amounts of web data to improve the representation ability of the model. Experimental results show that our method achieves an impressive performance and enables controllable editing on in-the-wild images with high fidelity. Our code will be avaliable in \url{https://github.com/chenhaoxing/DiffUTE}.
DMDD: A Large-Scale Dataset for Dataset Mentions Detection
May 19, 2023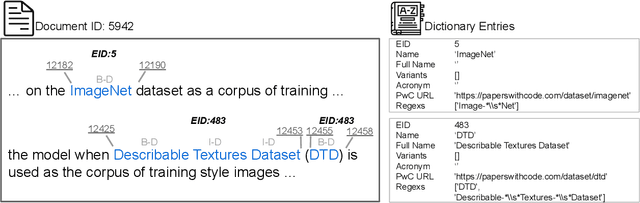
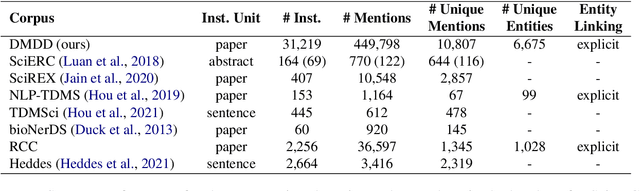
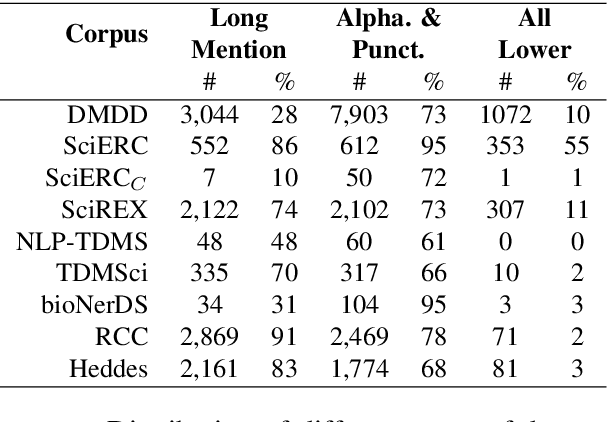
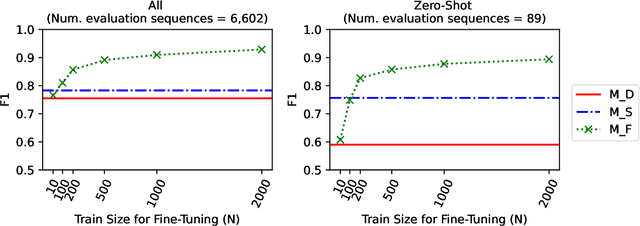
The recognition of dataset names is a critical task for automatic information extraction in scientific literature, enabling researchers to understand and identify research opportunities. However, existing corpora for dataset mention detection are limited in size and naming diversity. In this paper, we introduce the Dataset Mentions Detection Dataset (DMDD), the largest publicly available corpus for this task. DMDD consists of the DMDD main corpus, comprising 31,219 scientific articles with over 449,000 dataset mentions weakly annotated in the format of in-text spans, and an evaluation set, which comprises of 450 scientific articles manually annotated for evaluation purposes. We use DMDD to establish baseline performance for dataset mention detection and linking. By analyzing the performance of various models on DMDD, we are able to identify open problems in dataset mention detection. We invite the community to use our dataset as a challenge to develop novel dataset mention detection models.