 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRpc
Papers and Code
Bridging Protocol and Production: Design Patterns for Deploying AI Agents with Model Context Protocol
Mar 12, 2026The Model Context Protocol (MCP) standardizes how AI agents discover and invoke external tools, with over 10,000 active servers and 97 million monthly SDK downloads as of early 2026. Yet MCP does not yet standardize how agents safely operate those tools at production scale. Three protocol-level primitives remain missing: identity propagation, adaptive tool budgeting, and structured error semantics. This paper identifies these gaps through field lessons from an enterprise deployment of an AI agent platform integrated with a major cloud provider's MCP servers (client name redacted). We propose three mechanisms to fill them: (1) the Context-Aware Broker Protocol (CABP), which extends JSON-RPC with identity-scoped request routing via a six-stage broker pipeline; (2) Adaptive Timeout Budget Allocation (ATBA), which frames sequential tool invocation as a budget allocation problem over heterogeneous latency distributions; and (3) the Structured Error Recovery Framework (SERF), which provides machine-readable failure semantics that enable deterministic agent self-correction. We organize production failure modes into five design dimensions (server contracts, user context, timeouts, errors, and observability), document concrete failure vignettes, and present a production readiness checklist. All three algorithms are formalized as testable hypotheses with reproducible experimental methodology. Field observations demonstrate that while MCP provides a solid protocol foundation, reliable agent tool integration requires infrastructure-level mechanisms that the specification does not yet address.
RPC-Bench: A Fine-grained Benchmark for Research Paper Comprehension
Jan 14, 2026Understanding research papers remains challenging for foundation models due to specialized scientific discourse and complex figures and tables, yet existing benchmarks offer limited fine-grained evaluation at scale. To address this gap, we introduce RPC-Bench, a large-scale question-answering benchmark built from review-rebuttal exchanges of high-quality computer science papers, containing 15K human-verified QA pairs. We design a fine-grained taxonomy aligned with the scientific research flow to assess models' ability to understand and answer why, what, and how questions in scholarly contexts. We also define an elaborate LLM-human interaction annotation framework to support large-scale labeling and quality control. Following the LLM-as-a-Judge paradigm, we develop a scalable framework that evaluates models on correctness-completeness and conciseness, with high agreement to human judgment. Experiments reveal that even the strongest models (GPT-5) achieve only 68.2% correctness-completeness, dropping to 37.46% after conciseness adjustment, highlighting substantial gaps in precise academic paper understanding. Our code and data are available at https://rpc-bench.github.io/.
M4Human: A Large-Scale Multimodal mmWave Radar Benchmark for Human Mesh Reconstruction
Dec 17, 2025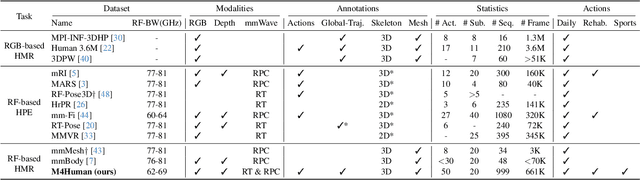
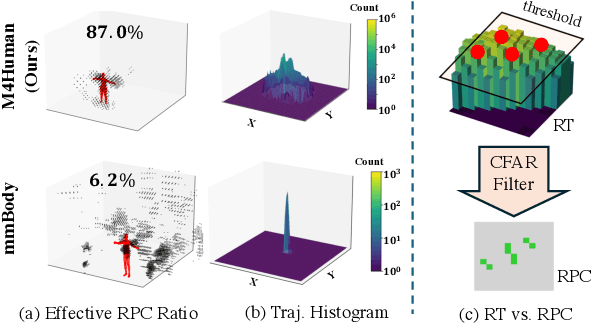

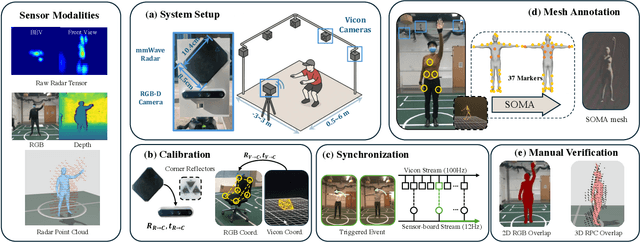
Human mesh reconstruction (HMR) provides direct insights into body-environment interaction, which enables various immersive applications. While existing large-scale HMR datasets rely heavily on line-of-sight RGB input, vision-based sensing is limited by occlusion, lighting variation, and privacy concerns. To overcome these limitations, recent efforts have explored radio-frequency (RF) mmWave radar for privacy-preserving indoor human sensing. However, current radar datasets are constrained by sparse skeleton labels, limited scale, and simple in-place actions. To advance the HMR research community, we introduce M4Human, the current largest-scale (661K-frame) ($9\times$ prior largest) multimodal benchmark, featuring high-resolution mmWave radar, RGB, and depth data. M4Human provides both raw radar tensors (RT) and processed radar point clouds (RPC) to enable research across different levels of RF signal granularity. M4Human includes high-quality motion capture (MoCap) annotations with 3D meshes and global trajectories, and spans 20 subjects and 50 diverse actions, including in-place, sit-in-place, and free-space sports or rehabilitation movements. We establish benchmarks on both RT and RPC modalities, as well as multimodal fusion with RGB-D modalities. Extensive results highlight the significance of M4Human for radar-based human modeling while revealing persistent challenges under fast, unconstrained motion. The dataset and code will be released after the paper publication.
Model Context Protocols in Adaptive Transport Systems: A Survey
Aug 26, 2025The rapid expansion of interconnected devices, autonomous systems, and AI applications has created severe fragmentation in adaptive transport systems, where diverse protocols and context sources remain isolated. This survey provides the first systematic investigation of the Model Context Protocol (MCP) as a unifying paradigm, highlighting its ability to bridge protocol-level adaptation with context-aware decision making. Analyzing established literature, we show that existing efforts have implicitly converged toward MCP-like architectures, signaling a natural evolution from fragmented solutions to standardized integration frameworks. We propose a five-category taxonomy covering adaptive mechanisms, context-aware frameworks, unification models, integration strategies, and MCP-enabled architectures. Our findings reveal three key insights: traditional transport protocols have reached the limits of isolated adaptation, MCP's client-server and JSON-RPC structure enables semantic interoperability, and AI-driven transport demands integration paradigms uniquely suited to MCP. Finally, we present a research roadmap positioning MCP as a foundation for next-generation adaptive, context-aware, and intelligent transport infrastructures.
Bencher: Simple and Reproducible Benchmarking for Black-Box Optimization
May 27, 2025We present Bencher, a modular benchmarking framework for black-box optimization that fundamentally decouples benchmark execution from optimization logic. Unlike prior suites that focus on combining many benchmarks in a single project, Bencher introduces a clean abstraction boundary: each benchmark is isolated in its own virtual Python environment and accessed via a unified, version-agnostic remote procedure call (RPC) interface. This design eliminates dependency conflicts and simplifies the integration of diverse, real-world benchmarks, which often have complex and conflicting software requirements. Bencher can be deployed locally or remotely via Docker or on high-performance computing (HPC) clusters via Singularity, providing a containerized, reproducible runtime for any benchmark. Its lightweight client requires minimal setup and supports drop-in evaluation of 80 benchmarks across continuous, categorical, and binary domains.
HDE-Array: Development and Validation of a New Dry Electrode Array Design to Acquire HD-sEMG for Hand Position Estimation
May 20, 2025This paper aims to introduce HDE-Array (High-Density Electrode Array), a novel dry electrode array for acquiring High-Density surface electromyography (HD-sEMG) for hand position estimation through RPC-Net (Recursive Prosthetic Control Network), a neural network defined in a previous study. We aim to demonstrate the hypothesis that the position estimates returned by RPC-Net using HD-sEMG signals acquired with HDE-Array are as accurate as those obtained from signals acquired with gel electrodes. We compared the results, in terms of precision of hand position estimation by RPC-Net, using signals acquired by traditional gel electrodes and by HDE-Array. As additional validation, we performed a variance analysis to confirm that the presence of only two rows of electrodes does not result in an excessive loss of information, and we characterized the electrode-skin impedance to assess the effects of the voltage divider effect and power line interference. Performance tests indicated that RPC-Net, used with HDE-Array, achieved comparable or superior results to those observed when used with the gel electrode setup. The dry electrodes demonstrated effective performance even with a simplified setup, highlighting potential cost and usability benefits. These results suggest improvements in the accessibility and user-friendliness of upper-limb rehabilitation devices and underscore the potential of HDE-Array and RPC-Net to revolutionize control for medical and non-medical applications.
Reasoning Path Compression: Compressing Generation Trajectories for Efficient LLM Reasoning
May 20, 2025



Recent reasoning-focused language models achieve high accuracy by generating lengthy intermediate reasoning paths before producing final answers. While this approach is effective in solving problems that require logical thinking, long reasoning paths significantly increase memory usage and throughput of token generation, limiting the practical deployment of such models. We propose Reasoning Path Compression (RPC), a training-free method that accelerates inference by leveraging the semantic sparsity of reasoning paths. RPC periodically compresses the KV cache by retaining KV cache that receive high importance score, which are computed using a selector window composed of recently generated queries. Experiments show that RPC improves generation throughput of QwQ-32B by up to 1.60$\times$ compared to the inference with full KV cache, with an accuracy drop of 1.2% on the AIME 2024 benchmark. Our findings demonstrate that semantic sparsity in reasoning traces can be effectively exploited for compression, offering a practical path toward efficient deployment of reasoning LLMs. Our code is available at https://github.com/jiwonsong-dev/ReasoningPathCompression.
Developing RPC-Net: Leveraging High-Density Electromyography and Machine Learning for Improved Hand Position Estimation
May 20, 2025Objective: The purpose of this study was to develop and evaluate the performance of RPC-Net (Recursive Prosthetic Control Network), a novel method using simple neural network architectures to translate electromyographic activity into hand position with high accuracy and computational efficiency. Methods: RPC-Net uses a regression-based approach to convert forearm electromyographic signals into hand kinematics. We tested the adaptability of the algorithm to different conditions and compared its performance with that of solutions from the academic literature. Results: RPC-Net demonstrated a high degree of accuracy in predicting hand position from electromyographic activity, outperforming other solutions with the same computational cost. Including previous position data consistently improved results across subjects and conditions. RPC-Net showed robustness against a reduction in the number of electromyography electrodes used and shorter input signals, indicating potential for further reduction in computational cost. Conclusion: The results demonstrate that RPC-Net is capable of accurately translating forearm electromyographic activity into hand position, offering a practical and adaptable tool that may be accessible in clinical settings. Significance: The development of RPC-Net represents a significant advancement. In clinical settings, its application could enable prosthetic devices to be controlled in a way that feels more natural, improving the quality of life for individuals with limb loss.
A survey of agent interoperability protocols: Model Context Protocol (MCP), Agent Communication Protocol (ACP), Agent-to-Agent Protocol (A2A), and Agent Network Protocol (ANP)
May 04, 2025



Large language model (LLM)-powered autonomous agents demand robust, standardized protocols to integrate tools, share contextual data, and coordinate tasks across heterogeneous systems. Ad-hoc integrations are difficult to scale, secure, and generalize across domains. This survey examines four emerging agent communication protocols: Model Context Protocol (MCP), Agent Communication Protocol (ACP), Agent-to-Agent Protocol (A2A), and Agent Network Protocol (ANP), each addressing interoperability in distinct deployment contexts. MCP provides a JSON-RPC client-server interface for secure tool invocation and typed data exchange. ACP introduces REST-native messaging via multi-part messages and asynchronous streaming to support multimodal agent responses. A2A enables peer-to-peer task outsourcing through capability-based Agent Cards, facilitating enterprise-scale workflows. ANP supports open-network agent discovery and secure collaboration using decentralized identifiers (DIDs) and JSON-LD graphs. The protocols are compared across multiple dimensions, including interaction modes, discovery mechanisms, communication patterns, and security models. Based on the comparative analysis, a phased adoption roadmap is proposed: beginning with MCP for tool access, followed by ACP for multimodal messaging, A2A for collaborative task execution, and extending to ANP for decentralized agent marketplaces. This work provides a comprehensive foundation for designing secure, interoperable, and scalable ecosystems of LLM-powered agents.
Planet as a Brain: Towards Internet of AgentSites based on AIOS Server
Apr 22, 2025



The internet is undergoing a historical transformation from the "Internet of Websites" to the "Internet of AgentSites." While traditional Websites served as the foundation for information hosting and dissemination, a new frontier is emerging where AgentSites serve as the hubs of the internet, where each AgentSite hosts one or more AI agents that receive tasks, address them, and deliver actionable solutions, marking a significant shift in the digital landscape and representing the next generation of online ecosystems. Under this vision, AIOS, the AI Agent Operating System, serves as the server for the development, deployment and execution of AI agents, which is a fundamental infrastructure for the Internet of Agentsites. In this paper, we introduce AIOS Server, a runtime framework to host agents and enable global-scale collaboration among decentralized agents. AIOS Server provides a communication protocol leveraging the Model Context Protocol (MCP) and JSON-RPC to enable agent-agent or human-agent interactions. Each AIOS node operates as a server to host and execute agents, while supporting peer-to-peer coordination without reliance on centralized orchestration. Based on AIOS Server, we further present the world's first practically deployed Internet of Agentsites (AIOS-IoA), including AgentHub for agent registration and discovery and AgentChat for interactive communication, at https://planet.aios.foundation. The agent discovery mechanism based on Distributed Hash Tables (DHT) and a Gossip protocol serves as the search engine for the internet of agentsites. This work provides a practical foundation for building the Internet of Agentsites-a new paradigm where autonomous agents become first-class citizens of the web. The implementation is available at https://github.com/agiresearch/AIOS.Server and will be integrated into the AIOS main branch at https://github.com/agiresearch/AIOS.