 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStreamMark: A Deep Learning-Based Semi-Fragile Audio Watermarking for Proactive Deepfake Detection
Apr 13, 2026The rapid advancement of generative AI has made it increasingly challenging to distinguish between deepfake audio and authentic human speech. To overcome the limitations of passive detection methods, we propose StreamMark, a novel deep learning-based, semi-fragile audio watermarking system. StreamMark is designed to be robust against benign audio conversions that preserve semantic meaning (e.g., compression, noise) while remaining fragile to malicious, semantics-altering manipulations (e.g., voice conversion, speech editing). Our method introduces a complex-domain embedding technique within a unique Encoder-Distortion-Decoder architecture, trained explicitly to differentiate between these two classes of transformations. Comprehensive benchmarks demonstrate that StreamMark achieves high imperceptibility (SNR 24.16 dB, PESQ 4.20), is resilient to real-world distortions like Opus encoding, and exhibits principled fragility against a suite of deepfake attacks, with message recovery accuracy dropping to chance levels (~50%), while remaining robust to benign AI-based style transfers (ACC >98%).
DSA-SRGS: Super-Resolution Gaussian Splatting for Dynamic Sparse-View DSA Reconstruction
Mar 05, 2026Digital subtraction angiography (DSA) is a key imaging technique for the auxiliary diagnosis and treatment of cerebrovascular diseases. Recent advancements in gaussian splatting and dynamic neural representations have enabled robust 3D vessel reconstruction from sparse dynamic inputs. However, these methods are fundamentally constrained by the resolution of input projections, where performing naive upsampling to enhance rendering resolution inevitably results in severe blurring and aliasing artifacts. Such lack of super-resolution capability prevents the reconstructed 4D models from recovering fine-grained vascular details and intricate branching structures, which restricts their application in precision diagnosis and treatment. To solve this problem, this paper proposes DSA-SRGS, the first super-resolution gaussian splatting framework for dynamic sparse-view DSA reconstruction. Specifically, we introduce a Multi-Fidelity Texture Learning Module that integrates high-quality priors from a fine-tuned DSA-specific super-resolution model, into the 4D reconstruction optimization. To mitigate potential hallucination artifacts from pseudo-labels, this module employs a Confidence-Aware Strategy to adaptively weight supervision signals between the original low-resolution projections and the generated high-resolution pseudo-labels. Furthermore, we develop Radiative Sub-Pixel Densification, an adaptive strategy that leverages gradient accumulation from high-resolution sub-pixel sampling to refine the 4D radiative gaussian kernels. Extensive experiments on two clinical DSA datasets demonstrate that DSA-SRGS significantly outperforms state-of-the-art methods in both quantitative metrics and qualitative visual fidelity.
Hyperspectral image reconstruction by deep learning with super-Rayleigh speckles
Feb 26, 2025



Ghost imaging via sparsity constraints (GISC) spectral camera modulates the three-dimensional (3D) hyperspectral image into a two-dimensional (2D) compressive image with speckles in a single shot. It obtains a 3D hyperspectral image (HSI) by reconstruction algorithms. The rapid development of deep learning has provided a new method for 3D HSI reconstruction. Moreover, the imaging performance of the GISC spectral camera can be improved by optimizing the speckle modulation. In this paper, we propose an end-to-end GISCnet with super-Rayleigh speckle modulation to improve the imaging quality of the GISC spectral camera. The structure of GISCnet is very simple but effective, and we can easily adjust the network structure parameters to improve the image reconstruction quality. Relative to Rayleigh speckles, our super-Rayleigh speckles modulation exhibits a wealth of detail in reconstructing 3D HSIs. After evaluating 648 3D HSIs, it was found that the average peak signal-to-noise ratio increased from 27 dB to 31 dB. Overall, the proposed GISCnet with super-Rayleigh speckle modulation can effectively improve the imaging quality of the GISC spectral camera by taking advantage of both optimized super-Rayleigh modulation and deep-learning image reconstruction, inspiring joint optimization of light-field modulation and image reconstruction to improve ghost imaging performance.
4DRGS: 4D Radiative Gaussian Splatting for Efficient 3D Vessel Reconstruction from Sparse-View Dynamic DSA Images
Dec 17, 2024



Reconstructing 3D vessel structures from sparse-view dynamic digital subtraction angiography (DSA) images enables accurate medical assessment while reducing radiation exposure. Existing methods often produce suboptimal results or require excessive computation time. In this work, we propose 4D radiative Gaussian splatting (4DRGS) to achieve high-quality reconstruction efficiently. In detail, we represent the vessels with 4D radiative Gaussian kernels. Each kernel has time-invariant geometry parameters, including position, rotation, and scale, to model static vessel structures. The time-dependent central attenuation of each kernel is predicted from a compact neural network to capture the temporal varying response of contrast agent flow. We splat these Gaussian kernels to synthesize DSA images via X-ray rasterization and optimize the model with real captured ones. The final 3D vessel volume is voxelized from the well-trained kernels. Moreover, we introduce accumulated attenuation pruning and bounded scaling activation to improve reconstruction quality. Extensive experiments on real-world patient data demonstrate that 4DRGS achieves impressive results in 5 minutes training, which is 32x faster than the state-of-the-art method. This underscores the potential of 4DRGS for real-world clinics.
3D MedDiffusion: A 3D Medical Diffusion Model for Controllable and High-quality Medical Image Generation
Dec 17, 2024



The generation of medical images presents significant challenges due to their high-resolution and three-dimensional nature. Existing methods often yield suboptimal performance in generating high-quality 3D medical images, and there is currently no universal generative framework for medical imaging. In this paper, we introduce the 3D Medical Diffusion (3D MedDiffusion) model for controllable, high-quality 3D medical image generation. 3D MedDiffusion incorporates a novel, highly efficient Patch-Volume Autoencoder that compresses medical images into latent space through patch-wise encoding and recovers back into image space through volume-wise decoding. Additionally, we design a new noise estimator to capture both local details and global structure information during diffusion denoising process. 3D MedDiffusion can generate fine-detailed, high-resolution images (up to 512x512x512) and effectively adapt to various downstream tasks as it is trained on large-scale datasets covering CT and MRI modalities and different anatomical regions (from head to leg). Experimental results demonstrate that 3D MedDiffusion surpasses state-of-the-art methods in generative quality and exhibits strong generalizability across tasks such as sparse-view CT reconstruction, fast MRI reconstruction, and data augmentation.
TeethDreamer: 3D Teeth Reconstruction from Five Intra-oral Photographs
Jul 16, 2024



Orthodontic treatment usually requires regular face-to-face examinations to monitor dental conditions of the patients. When in-person diagnosis is not feasible, an alternative is to utilize five intra-oral photographs for remote dental monitoring. However, it lacks of 3D information, and how to reconstruct 3D dental models from such sparse view photographs is a challenging problem. In this study, we propose a 3D teeth reconstruction framework, named TeethDreamer, aiming to restore the shape and position of the upper and lower teeth. Given five intra-oral photographs, our approach first leverages a large diffusion model's prior knowledge to generate novel multi-view images with known poses to address sparse inputs and then reconstructs high-quality 3D teeth models by neural surface reconstruction. To ensure the 3D consistency across generated views, we integrate a 3D-aware feature attention mechanism in the reverse diffusion process. Moreover, a geometry-aware normal loss is incorporated into the teeth reconstruction process to enhance geometry accuracy. Extensive experiments demonstrate the superiority of our method over current state-of-the-arts, giving the potential to monitor orthodontic treatment remotely. Our code is available at https://github.com/ShanghaiTech-IMPACT/TeethDreamer
3D Vessel Reconstruction from Sparse-View Dynamic DSA Images via Vessel Probability Guided Attenuation Learning
May 17, 2024



Digital Subtraction Angiography (DSA) is one of the gold standards in vascular disease diagnosing. With the help of contrast agent, time-resolved 2D DSA images deliver comprehensive insights into blood flow information and can be utilized to reconstruct 3D vessel structures. Current commercial DSA systems typically demand hundreds of scanning views to perform reconstruction, resulting in substantial radiation exposure. However, sparse-view DSA reconstruction, aimed at reducing radiation dosage, is still underexplored in the research community. The dynamic blood flow and insufficient input of sparse-view DSA images present significant challenges to the 3D vessel reconstruction task. In this study, we propose to use a time-agnostic vessel probability field to solve this problem effectively. Our approach, termed as vessel probability guided attenuation learning, represents the DSA imaging as a complementary weighted combination of static and dynamic attenuation fields, with the weights derived from the vessel probability field. Functioning as a dynamic mask, vessel probability provides proper gradients for both static and dynamic fields adaptive to different scene types. This mechanism facilitates a self-supervised decomposition between static backgrounds and dynamic contrast agent flow, and significantly improves the reconstruction quality. Our model is trained by minimizing the disparity between synthesized projections and real captured DSA images. We further employ two training strategies to improve our reconstruction quality: (1) coarse-to-fine progressive training to achieve better geometry and (2) temporal perturbed rendering loss to enforce temporal consistency. Experimental results have demonstrated superior quality on both 3D vessel reconstruction and 2D view synthesis.
Multi-View Vertebra Localization and Identification from CT Images
Jul 24, 2023



Accurately localizing and identifying vertebrae from CT images is crucial for various clinical applications. However, most existing efforts are performed on 3D with cropping patch operation, suffering from the large computation costs and limited global information. In this paper, we propose a multi-view vertebra localization and identification from CT images, converting the 3D problem into a 2D localization and identification task on different views. Without the limitation of the 3D cropped patch, our method can learn the multi-view global information naturally. Moreover, to better capture the anatomical structure information from different view perspectives, a multi-view contrastive learning strategy is developed to pre-train the backbone. Additionally, we further propose a Sequence Loss to maintain the sequential structure embedded along the vertebrae. Evaluation results demonstrate that, with only two 2D networks, our method can localize and identify vertebrae in CT images accurately, and outperforms the state-of-the-art methods consistently. Our code is available at https://github.com/ShanghaiTech-IMPACT/Multi-View-Vertebra-Localization-and-Identification-from-CT-Images.
Geometry-Aware Attenuation Field Learning for Sparse-View CBCT Reconstruction
Mar 26, 2023



Cone Beam Computed Tomography (CBCT) is the most widely used imaging method in dentistry. As hundreds of X-ray projections are needed to reconstruct a high-quality CBCT image (i.e., the attenuation field) in traditional algorithms, sparse-view CBCT reconstruction has become a main focus to reduce radiation dose. Several attempts have been made to solve it while still suffering from insufficient data or poor generalization ability for novel patients. This paper proposes a novel attenuation field encoder-decoder framework by first encoding the volumetric feature from multi-view X-ray projections, then decoding it into the desired attenuation field. The key insight is when building the volumetric feature, we comply with the multi-view CBCT reconstruction nature and emphasize the view consistency property by geometry-aware spatial feature querying and adaptive feature fusing. Moreover, the prior knowledge information learned from data population guarantees our generalization ability when dealing with sparse view input. Comprehensive evaluations have demonstrated the superiority in terms of reconstruction quality, and the downstream application further validates the feasibility of our method in real-world clinics.
Hyperspectral image reconstruction for spectral camera based on ghost imaging via sparsity constraints using V-DUnet
Jun 28, 2022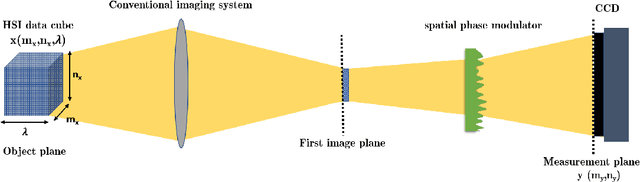
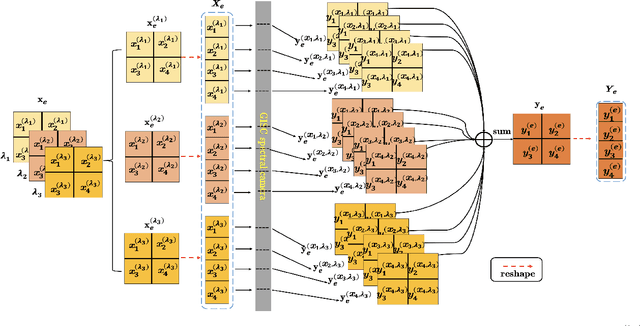
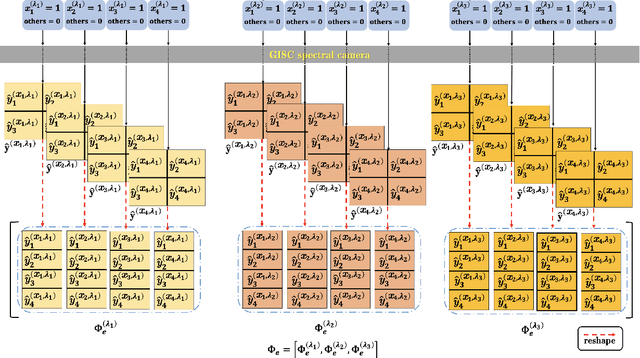
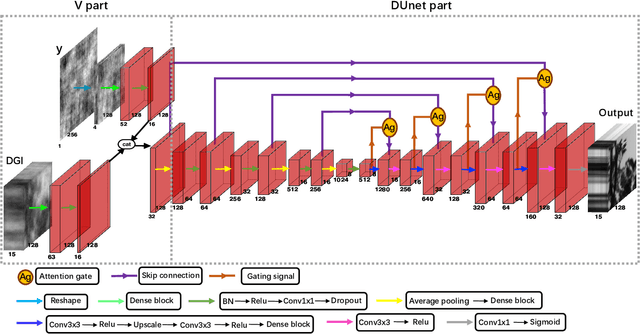
Spectral camera based on ghost imaging via sparsity constraints (GISC spectral camera) obtains three-dimensional (3D) hyperspectral information with two-dimensional (2D) compressive measurements in a single shot, which has attracted much attention in recent years. However, its imaging quality and real-time performance of reconstruction still need to be further improved. Recently, deep learning has shown great potential in improving the reconstruction quality and reconstruction speed for computational imaging. When applying deep learning into GISC spectral camera, there are several challenges need to be solved: 1) how to deal with the large amount of 3D hyperspectral data, 2) how to reduce the influence caused by the uncertainty of the random reference measurements, 3) how to improve the reconstructed image quality as far as possible. In this paper, we present an end-to-end V-DUnet for the reconstruction of 3D hyperspectral data in GISC spectral camera. To reduce the influence caused by the uncertainty of the measurement matrix and enhance the reconstructed image quality, both differential ghost imaging results and the detected measurements are sent into the network's inputs. Compared with compressive sensing algorithm, such as PICHCS and TwIST, it not only significantly improves the imaging quality with high noise immunity, but also speeds up the reconstruction time by more than two orders of magnitude.