 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeASPIRE: Agentic /Skills Discovery for Robotics
Jun 30, 2026Traditional robot programming is challenging: it requires orchestrating multimodal perception, managing physical contact dynamics, and handling diverse configurations and execution failures. We introduce ASPIRE (Agentic Skill Programming through Iterative Robot Exploration), a continual learning system that autonomously writes and refines robot control programs in a code-as-policy paradigm while compounding experience into a reusable skill library. ASPIRE discovers skills that persist across tasks, simulation and real-world settings, and embodiments. It operates in an open-ended loop with three components: (1) a closed-loop robot execution engine that exposes fine-grained multimodal traces, enabling autonomous failure diagnosis, repair synthesis, and validation; (2) a continually expanding skill library that distills validated fixes into reusable, transferable knowledge; and (3) evolutionary search that generates diverse task sequences and control programs to explore beyond single-trajectory refinement. ASPIRE surpasses prior methods by up to 77% on LIBERO-Pro manipulation under perturbation, 72% on Robosuite bimanual handover, and 32% on BEHAVIOR-1K long-horizon household tasks. Its accumulated library also enables zero-shot generalization to unseen long-horizon tasks: on LIBERO-Pro Long, ASPIRE achieves 31% success versus 4% for prior methods despite their use of test-time reasoning and retries. Finally, simulation-discovered skills provide initial evidence of sim-to-real transfer, substantially reducing real-robot programming effort across different embodiments and robot APIs.
World Action Models are Zero-shot Policies
Feb 17, 2026State-of-the-art Vision-Language-Action (VLA) models excel at semantic generalization but struggle to generalize to unseen physical motions in novel environments. We introduce DreamZero, a World Action Model (WAM) built upon a pretrained video diffusion backbone. Unlike VLAs, WAMs learn physical dynamics by predicting future world states and actions, using video as a dense representation of how the world evolves. By jointly modeling video and action, DreamZero learns diverse skills effectively from heterogeneous robot data without relying on repetitive demonstrations. This results in over 2x improvement in generalization to new tasks and environments compared to state-of-the-art VLAs in real robot experiments. Crucially, through model and system optimizations, we enable a 14B autoregressive video diffusion model to perform real-time closed-loop control at 7Hz. Finally, we demonstrate two forms of cross-embodiment transfer: video-only demonstrations from other robots or humans yield a relative improvement of over 42% on unseen task performance with just 10-20 minutes of data. More surprisingly, DreamZero enables few-shot embodiment adaptation, transferring to a new embodiment with only 30 minutes of play data while retaining zero-shot generalization.
NitroGen: An Open Foundation Model for Generalist Gaming Agents
Jan 04, 2026We introduce NitroGen, a vision-action foundation model for generalist gaming agents that is trained on 40,000 hours of gameplay videos across more than 1,000 games. We incorporate three key ingredients: 1) an internet-scale video-action dataset constructed by automatically extracting player actions from publicly available gameplay videos, 2) a multi-game benchmark environment that can measure cross-game generalization, and 3) a unified vision-action model trained with large-scale behavior cloning. NitroGen exhibits strong competence across diverse domains, including combat encounters in 3D action games, high-precision control in 2D platformers, and exploration in procedurally generated worlds. It transfers effectively to unseen games, achieving up to 52% relative improvement in task success rates over models trained from scratch. We release the dataset, evaluation suite, and model weights to advance research on generalist embodied agents.
FLARE: Robot Learning with Implicit World Modeling
May 21, 2025We introduce $\textbf{F}$uture $\textbf{LA}$tent $\textbf{RE}$presentation Alignment ($\textbf{FLARE}$), a novel framework that integrates predictive latent world modeling into robot policy learning. By aligning features from a diffusion transformer with latent embeddings of future observations, $\textbf{FLARE}$ enables a diffusion transformer policy to anticipate latent representations of future observations, allowing it to reason about long-term consequences while generating actions. Remarkably lightweight, $\textbf{FLARE}$ requires only minimal architectural modifications -- adding a few tokens to standard vision-language-action (VLA) models -- yet delivers substantial performance gains. Across two challenging multitask simulation imitation learning benchmarks spanning single-arm and humanoid tabletop manipulation, $\textbf{FLARE}$ achieves state-of-the-art performance, outperforming prior policy learning baselines by up to 26%. Moreover, $\textbf{FLARE}$ unlocks the ability to co-train with human egocentric video demonstrations without action labels, significantly boosting policy generalization to a novel object with unseen geometry with as few as a single robot demonstration. Our results establish $\textbf{FLARE}$ as a general and scalable approach for combining implicit world modeling with high-frequency robotic control.
DreamGen: Unlocking Generalization in Robot Learning through Neural Trajectories
May 19, 2025We introduce DreamGen, a simple yet highly effective 4-stage pipeline for training robot policies that generalize across behaviors and environments through neural trajectories - synthetic robot data generated from video world models. DreamGen leverages state-of-the-art image-to-video generative models, adapting them to the target robot embodiment to produce photorealistic synthetic videos of familiar or novel tasks in diverse environments. Since these models generate only videos, we recover pseudo-action sequences using either a latent action model or an inverse-dynamics model (IDM). Despite its simplicity, DreamGen unlocks strong behavior and environment generalization: a humanoid robot can perform 22 new behaviors in both seen and unseen environments, while requiring teleoperation data from only a single pick-and-place task in one environment. To evaluate the pipeline systematically, we introduce DreamGen Bench, a video generation benchmark that shows a strong correlation between benchmark performance and downstream policy success. Our work establishes a promising new axis for scaling robot learning well beyond manual data collection.
GR00T N1: An Open Foundation Model for Generalist Humanoid Robots
Mar 18, 2025General-purpose robots need a versatile body and an intelligent mind. Recent advancements in humanoid robots have shown great promise as a hardware platform for building generalist autonomy in the human world. A robot foundation model, trained on massive and diverse data sources, is essential for enabling the robots to reason about novel situations, robustly handle real-world variability, and rapidly learn new tasks. To this end, we introduce GR00T N1, an open foundation model for humanoid robots. GR00T N1 is a Vision-Language-Action (VLA) model with a dual-system architecture. The vision-language module (System 2) interprets the environment through vision and language instructions. The subsequent diffusion transformer module (System 1) generates fluid motor actions in real time. Both modules are tightly coupled and jointly trained end-to-end. We train GR00T N1 with a heterogeneous mixture of real-robot trajectories, human videos, and synthetically generated datasets. We show that our generalist robot model GR00T N1 outperforms the state-of-the-art imitation learning baselines on standard simulation benchmarks across multiple robot embodiments. Furthermore, we deploy our model on the Fourier GR-1 humanoid robot for language-conditioned bimanual manipulation tasks, achieving strong performance with high data efficiency.
UniDexGrasp: Universal Robotic Dexterous Grasping via Learning Diverse Proposal Generation and Goal-Conditioned Policy
Mar 02, 2023



In this work, we tackle the problem of learning universal robotic dexterous grasping from a point cloud observation under a table-top setting. The goal is to grasp and lift up objects in high-quality and diverse ways and generalize across hundreds of categories and even the unseen. Inspired by successful pipelines used in parallel gripper grasping, we split the task into two stages: 1) grasp proposal (pose) generation and 2) goal-conditioned grasp execution. For the first stage, we propose a novel probabilistic model of grasp pose conditioned on the point cloud observation that factorizes rotation from translation and articulation. Trained on our synthesized large-scale dexterous grasp dataset, this model enables us to sample diverse and high-quality dexterous grasp poses for the object in the point cloud. For the second stage, we propose to replace the motion planning used in parallel gripper grasping with a goal-conditioned grasp policy, due to the complexity involved in dexterous grasping execution. Note that it is very challenging to learn this highly generalizable grasp policy that only takes realistic inputs without oracle states. We thus propose several important innovations, including state canonicalization, object curriculum, and teacher-student distillation. Integrating the two stages, our final pipeline becomes the first to achieve universal generalization for dexterous grasping, demonstrating an average success rate of more than 60% on thousands of object instances, which significantly out performs all baselines, meanwhile showing only a minimal generalization gap.
DexGraspNet: A Large-Scale Robotic Dexterous Grasp Dataset for General Objects Based on Simulation
Oct 06, 2022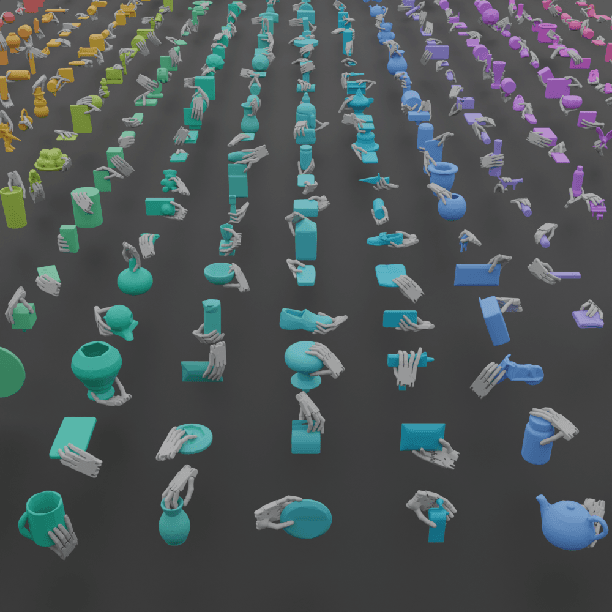
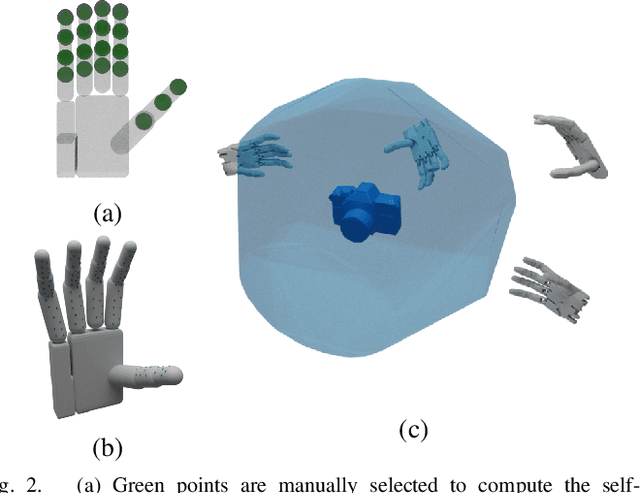
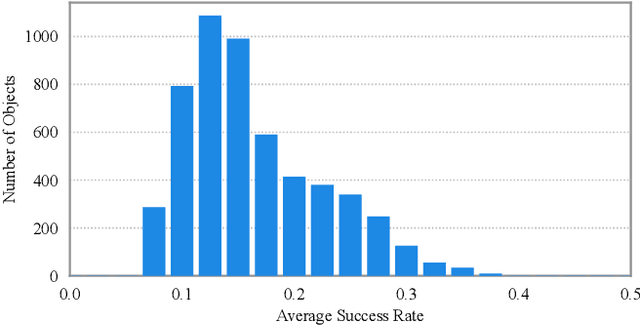
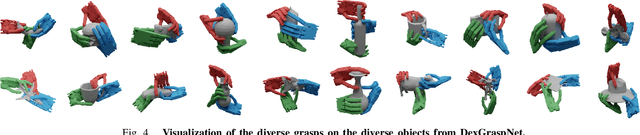
Object grasping using dexterous hands is a crucial yet challenging task for robotic dexterous manipulation. Compared with the field of object grasping with parallel grippers, dexterous grasping is very under-explored, partially owing to the lack of a large-scale dataset. In this work, we present a large-scale simulated dataset, DexGraspNet, for robotic dexterous grasping, along with a highly efficient synthesis method for diverse dexterous grasping synthesis. Leveraging a highly accelerated differentiable force closure estimator, we, for the first time, are able to synthesize stable and diverse grasps efficiently and robustly. We choose ShadowHand, a dexterous gripper commonly seen in robotics, and generated 1.32 million grasps for 5355 objects, covering more than 133 object categories and containing more than 200 diverse grasps for each object instance, with all grasps having been validated by the physics simulator. Compared to the previous dataset generated by GraspIt!, our dataset has not only more objects and grasps, but also higher diversity and quality. Via performing cross-dataset experiments, we show that training several algorithms of dexterous grasp synthesis on our datasets significantly outperforms training on the previous one, demonstrating the large scale and diversity of DexGraspNet. We will release the data and tools upon acceptance.
Tracking and Reconstructing Hand Object Interactions from Point Cloud Sequences in the Wild
Sep 24, 2022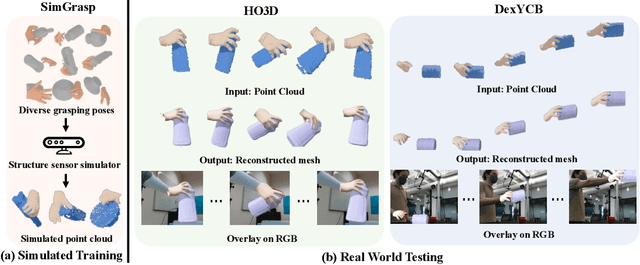
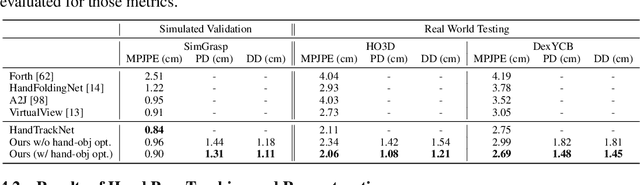
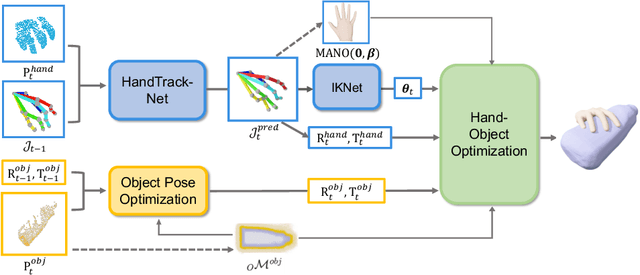
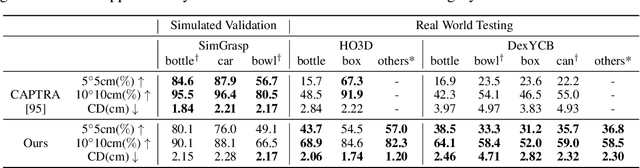
In this work, we tackle the challenging task of jointly tracking hand object pose and reconstructing their shapes from depth point cloud sequences in the wild, given the initial poses at frame 0. We for the first time propose a point cloud based hand joint tracking network, HandTrackNet, to estimate the inter-frame hand joint motion. Our HandTrackNet proposes a novel hand pose canonicalization module to ease the tracking task, yielding accurate and robust hand joint tracking. Our pipeline then reconstructs the full hand via converting the predicted hand joints into a template-based parametric hand model MANO. For object tracking, we devise a simple yet effective module that estimates the object SDF from the first frame and performs optimization-based tracking. Finally, a joint optimization step is adopted to perform joint hand and object reasoning, which alleviates the occlusion-induced ambiguity and further refines the hand pose. During training, the whole pipeline only sees purely synthetic data, which are synthesized with sufficient variations and by depth simulation for the ease of generalization. The whole pipeline is pertinent to the generalization gaps and thus directly transferable to real in-the-wild data. We evaluate our method on two real hand object interaction datasets, e.g. HO3D and DexYCB, without any finetuning. Our experiments demonstrate that the proposed method significantly outperforms the previous state-of-the-art depth-based hand and object pose estimation and tracking methods, running at a frame rate of 9 FPS.