 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFoundations of Practical Quantum Advantage in Quantum-Informed Machine Learning for Predicting Chaos
Jun 11, 2026We develop theoretical foundations for a practical quantum-advantage mechanism in quantum-informed machine learning for chaotic dynamical systems. A family of k-indexed higher-order quantum statistical priors (Q-Priors) hosts the k-point marginal of the invariant measure on n_q = kq qubits, extending the single-site construction of prior work. We prove a two-stage advantage. In the representation stage, superposition and entanglement compactly store non-factorisable spatial correlations of the invariant measure on n_q qubits. In the extraction stage, joint Bell measurements on two copies estimate any post hoc Pauli functional with a copy-pair count independent of n_q, whereas any adaptive single-copy protocol for the corresponding full-Pauli read-out requires Omega(2^(n_q)) copies; this is a provable quantum-classical separation in copy-measurement complexity. The two-copy read-out is realised in simulation and on IQM superconducting processors. Two case studies instantiate the mechanism in workflows of independent scientific value: a turbulent channel-flow study in which the two-copy read-out yields a named non-diagonal correlator of the invariant measure (the velocity-direction coherence), and a medium-range weather forecasting workflow on the European Centre for Medium-Range Weather Forecasts ERA5 reanalysis in which the diagonal k <= 2 Q-Prior steers a Koopman rollout, improves anomaly-correlation skill by 10-39% across 48-240 h lead times, and reduces the long-horizon collapse of rollouts onto a static mean field. The two conditions of our practical-advantage definition are met at complementary levels, identifying a candidate route to practical quantum advantage before fault-tolerant hardware.
Physical Fidelity Reconstruction via Improved Consistency-Distilled Flow Matching for Dynamical Systems
May 07, 2026Reconstructing high-fidelity flow fields from low-fidelity observations is a central problem in scientific machine learning, yet recent diffusion and flow-matching models typically rely on iterative sampling, making them costly for latency-sensitive workflows such as ensemble forecasting, real-time visualization, and simulation-in-the-loop inference. We study whether a high-fidelity flow-matching generative model can be compressed into a compact one-step model for fast scientific flow reconstruction. Our approach distills an optimal-transport flow-matching teacher into a one-step consistency model. Low-fidelity observations are incorporated at inference by initializing the generative trajectory from a noised observation along the transport path, allowing an unconditional high-fidelity flow model to perform conditional reconstruction without retraining the teacher. We evaluate this distillation strategy on three fluid benchmarks, Smoke Buoyancy, Turbulent Channel Flow, and Kolmogorov Flow, using coarse-to-fine reconstruction as a controlled testbed at field sizes up to $256 \times 256$. Across these settings, the distilled student retains similar performance of the teacher's model on spectrum metrics, while using roughly half as many parameters and achieving a $12\times$ inference speedup over the flow-matching teacher. Under the same training budget, the distilled student also outperforms a one-step consistency model trained directly from scratch by $23.1\%$ in SSIM, showing that teacher distillation improves training efficiency rather than merely accelerating sampling. These results suggest a promising route for turning future high-capacity scientific generative models into compact reconstruction models that are faster to train, cheaper to run, and easier to deploy.
CAMO: An Agentic Framework for Automated Causal Discovery from Micro Behaviors to Macro Emergence in LLM Agent Simulations
Apr 16, 2026LLM-empowered agent simulations are increasingly used to study social emergence, yet the micro-to-macro causal mechanisms behind macro outcomes often remain unclear. This is challenging because emergence arises from intertwined agent interactions and meso-level feedback and nonlinearity, making generative mechanisms hard to disentangle. To this end, we introduce \textbf{\textsc{CAMO}}, an automated \textbf{Ca}usal discovery framework from \textbf{M}icr\textbf{o} behaviors to \textbf{M}acr\textbf{o} Emergence in LLM agent simulations. \textsc{CAMO} converts mechanistic hypotheses into computable factors grounded in simulation records and learns a compact causal representation centered on an emergent target $Y$. \textsc{CAMO} outputs a computable Markov boundary and a minimal upstream explanatory subgraph, yielding interpretable causal chains and actionable intervention levers. It also uses simulator-internal counterfactual probing to orient ambiguous edges and revise hypotheses when evidence contradicts the current view. Experiments across four emergent settings demonstrate the promise of \textsc{CAMO}.
MENO: MeanFlow-Enhanced Neural Operators for Dynamical Systems
Apr 08, 2026Neural operators have emerged as powerful surrogates for dynamical systems due to their grid-invariant properties and computational efficiency. However, the Fourier-based neural operator framework inherently truncates high-frequency components in spectral space, resulting in the loss of small-scale structures and degraded prediction quality at high resolutions when trained on low-resolution data. While diffusion-based enhancement methods can recover multi-scale features, they introduce substantial inference overhead that undermines the efficiency advantage of neural operators. In this work, we introduce \textbf{M}eanFlow-\textbf{E}nhanced \textbf{N}eural \textbf{O}perators (MENO), a novel framework that achieves accurate all-scale predictions with minimal inference cost. By leveraging the improved MeanFlow method, MENO restores both small-scale details and large-scale dynamics with superior physical fidelity and statistical accuracy. We evaluate MENO on three challenging dynamical systems, including phase-field dynamics, 2D Kolmogorov flow, and active matter dynamics, at resolutions up to 256$\times$256. Across all benchmarks, MENO improves the power spectrum density accuracy by up to a factor of 2 compared to baseline neural operators while achieving 12$\times$ faster inference than the state-of-the-art Diffusion Denoising Implicit Model (DDIM)-enhanced counterparts, effectively bridging the gap between accuracy and efficiency. The flexibility and efficiency of MENO position it as an efficient surrogate model for scientific machine learning applications where both statistical integrity and computational efficiency are paramount.
Invariant Causal Routing for Governing Social Norms in Online Market Economies
Mar 04, 2026Social norms are stable behavioral patterns that emerge endogenously within economic systems through repeated interactions among agents. In online market economies, such norms -- like fair exposure, sustained participation, and balanced reinvestment -- are critical for long-term stability. We aim to understand the causal mechanisms driving these emergent norms and to design principled interventions that can steer them toward desired outcomes. This is challenging because norms arise from countless micro-level interactions that aggregate into macro-level regularities, making causal attribution and policy transferability difficult. To address this, we propose \textbf{Invariant Causal Routing (ICR)}, a causal governance framework that identifies policy-norm relations stable across heterogeneous environments. ICR integrates counterfactual reasoning with invariant causal discovery to separate genuine causal effects from spurious correlations and to construct interpretable, auditable policy rules that remain effective under distribution shift. In heterogeneous agent simulations calibrated with real data, ICR yields more stable norms, smaller generalization gaps, and more concise rules than correlation or coverage baselines, demonstrating that causal invariance offers a principled and interpretable foundation for governance.
Uni-Flow: a unified autoregressive-diffusion model for complex multiscale flows
Feb 17, 2026Spatiotemporal flows govern diverse phenomena across physics, biology, and engineering, yet modelling their multiscale dynamics remains a central challenge. Despite major advances in physics-informed machine learning, existing approaches struggle to simultaneously maintain long-term temporal evolution and resolve fine-scale structure across chaotic, turbulent, and physiological regimes. Here, we introduce Uni-Flow, a unified autoregressive-diffusion framework that explicitly separates temporal evolution from spatial refinement for modelling complex dynamical systems. The autoregressive component learns low-resolution latent dynamics that preserve large-scale structure and ensure stable long-horizon rollouts, while the diffusion component reconstructs high-resolution physical fields, recovering fine-scale features in a small number of denoising steps. We validate Uni-Flow across canonical benchmarks, including two-dimensional Kolmogorov flow, three-dimensional turbulent channel inflow generation with a quantum-informed autoregressive prior, and patient-specific simulations of aortic coarctation derived from high-fidelity lattice Boltzmann hemodynamic solvers. In the cardiovascular setting, Uni-Flow enables task-level faster than real-time inference of pulsatile hemodynamics, reconstructing high-resolution pressure fields over physiologically relevant time horizons in seconds rather than hours. By transforming high-fidelity hemodynamic simulation from an offline, HPC-bound process into a deployable surrogate, Uni-Flow establishes a pathway to faster-than-real-time modelling of complex multiscale flows, with broad implications for scientific machine learning in flow physics.
Fast-Forward Lattice Boltzmann: Learning Kinetic Behaviour with Physics-Informed Neural Operators
Sep 26, 2025


The lattice Boltzmann equation (LBE), rooted in kinetic theory, provides a powerful framework for capturing complex flow behaviour by describing the evolution of single-particle distribution functions (PDFs). Despite its success, solving the LBE numerically remains computationally intensive due to strict time-step restrictions imposed by collision kernels. Here, we introduce a physics-informed neural operator framework for the LBE that enables prediction over large time horizons without step-by-step integration, effectively bypassing the need to explicitly solve the collision kernel. We incorporate intrinsic moment-matching constraints of the LBE, along with global equivariance of the full distribution field, enabling the model to capture the complex dynamics of the underlying kinetic system. Our framework is discretization-invariant, enabling models trained on coarse lattices to generalise to finer ones (kinetic super-resolution). In addition, it is agnostic to the specific form of the underlying collision model, which makes it naturally applicable across different kinetic datasets regardless of the governing dynamics. Our results demonstrate robustness across complex flow scenarios, including von Karman vortex shedding, ligament breakup, and bubble adhesion. This establishes a new data-driven pathway for modelling kinetic systems.
Entropy-Constrained Strategy Optimization in Urban Floods: A Multi-Agent Framework with LLM and Knowledge Graph Integration
Aug 20, 2025In recent years, the increasing frequency of extreme urban rainfall events has posed significant challenges to emergency scheduling systems. Urban flooding often leads to severe traffic congestion and service disruptions, threatening public safety and mobility. However, effective decision making remains hindered by three key challenges: (1) managing trade-offs among competing goals (e.g., traffic flow, task completion, and risk mitigation) requires dynamic, context-aware strategies; (2) rapidly evolving environmental conditions render static rules inadequate; and (3) LLM-generated strategies frequently suffer from semantic instability and execution inconsistency. Existing methods fail to align perception, global optimization, and multi-agent coordination within a unified framework. To tackle these challenges, we introduce H-J, a hierarchical multi-agent framework that integrates knowledge-guided prompting, entropy-constrained generation, and feedback-driven optimization. The framework establishes a closed-loop pipeline spanning from multi-source perception to strategic execution and continuous refinement. We evaluate H-J on real-world urban topology and rainfall data under three representative conditions: extreme rainfall, intermittent bursts, and daily light rain. Experiments show that H-J outperforms rule-based and reinforcement-learning baselines in traffic smoothness, task success rate, and system robustness. These findings highlight the promise of uncertainty-aware, knowledge-constrained LLM-based approaches for enhancing resilience in urban flood response.
An Explainable Emotion Alignment Framework for LLM-Empowered Agent in Metaverse Service Ecosystem
Jul 30, 2025



Metaverse service is a product of the convergence between Metaverse and service systems, designed to address service-related challenges concerning digital avatars, digital twins, and digital natives within Metaverse. With the rise of large language models (LLMs), agents now play a pivotal role in Metaverse service ecosystem, serving dual functions: as digital avatars representing users in the virtual realm and as service assistants (or NPCs) providing personalized support. However, during the modeling of Metaverse service ecosystems, existing LLM-based agents face significant challenges in bridging virtual-world services with real-world services, particularly regarding issues such as character data fusion, character knowledge association, and ethical safety concerns. This paper proposes an explainable emotion alignment framework for LLM-based agents in Metaverse Service Ecosystem. It aims to integrate factual factors into the decision-making loop of LLM-based agents, systematically demonstrating how to achieve more relational fact alignment for these agents. Finally, a simulation experiment in the Offline-to-Offline food delivery scenario is conducted to evaluate the effectiveness of this framework, obtaining more realistic social emergence.
Causal Sufficiency and Necessity Improves Chain-of-Thought Reasoning
Jun 11, 2025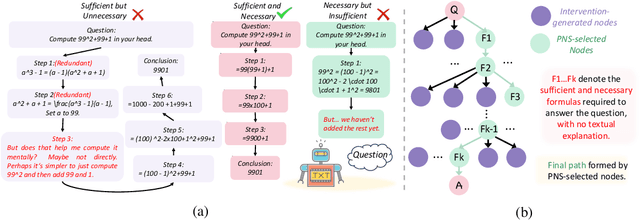
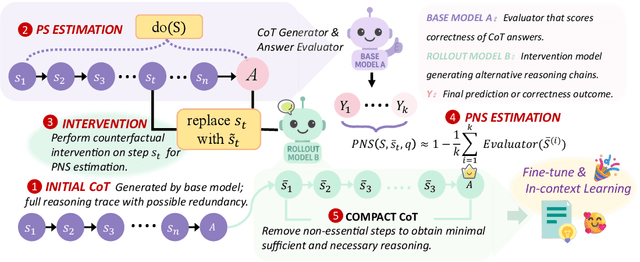
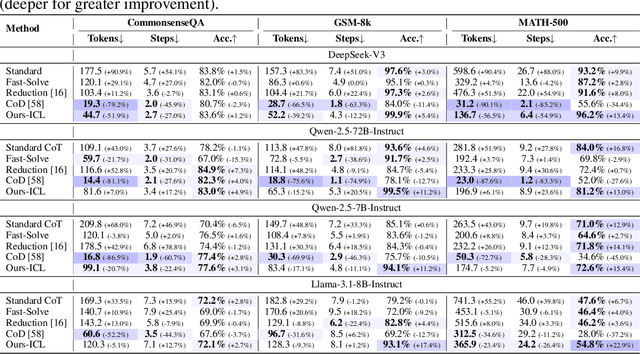
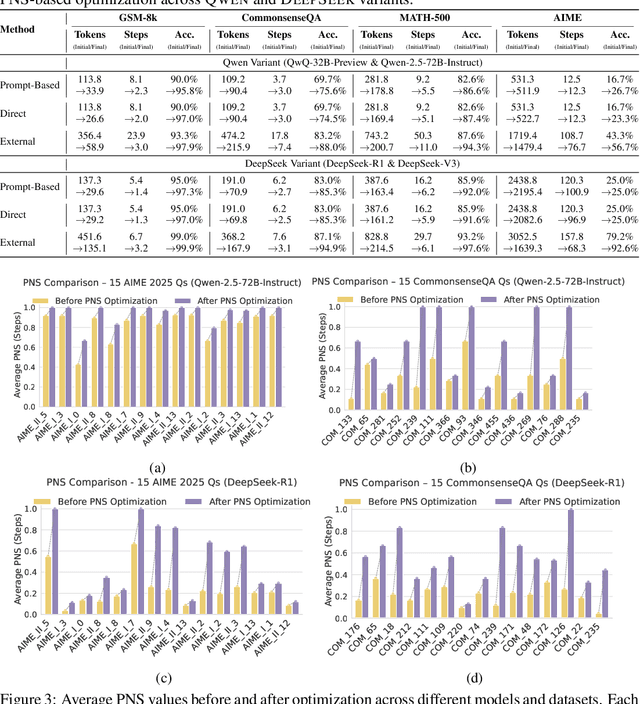
Chain-of-Thought (CoT) prompting plays an indispensable role in endowing large language models (LLMs) with complex reasoning capabilities. However, CoT currently faces two fundamental challenges: (1) Sufficiency, which ensures that the generated intermediate inference steps comprehensively cover and substantiate the final conclusion; and (2) Necessity, which identifies the inference steps that are truly indispensable for the soundness of the resulting answer. We propose a causal framework that characterizes CoT reasoning through the dual lenses of sufficiency and necessity. Incorporating causal Probability of Sufficiency and Necessity allows us not only to determine which steps are logically sufficient or necessary to the prediction outcome, but also to quantify their actual influence on the final reasoning outcome under different intervention scenarios, thereby enabling the automated addition of missing steps and the pruning of redundant ones. Extensive experimental results on various mathematical and commonsense reasoning benchmarks confirm substantial improvements in reasoning efficiency and reduced token usage without sacrificing accuracy. Our work provides a promising direction for improving LLM reasoning performance and cost-effectiveness.