 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBronchovascular Tree-Guided Weakly Supervised Learning Method for Pulmonary Segment Segmentation
May 20, 2025



Pulmonary segment segmentation is crucial for cancer localization and surgical planning. However, the pixel-wise annotation of pulmonary segments is laborious, as the boundaries between segments are indistinguishable in medical images. To this end, we propose a weakly supervised learning (WSL) method, termed Anatomy-Hierarchy Supervised Learning (AHSL), which consults the precise clinical anatomical definition of pulmonary segments to perform pulmonary segment segmentation. Since pulmonary segments reside within the lobes and are determined by the bronchovascular tree, i.e., artery, airway and vein, the design of the loss function is founded on two principles. First, segment-level labels are utilized to directly supervise the output of the pulmonary segments, ensuring that they accurately encompass the appropriate bronchovascular tree. Second, lobe-level supervision indirectly oversees the pulmonary segment, ensuring their inclusion within the corresponding lobe. Besides, we introduce a two-stage segmentation strategy that incorporates bronchovascular priori information. Furthermore, a consistency loss is proposed to enhance the smoothness of segment boundaries, along with an evaluation metric designed to measure the smoothness of pulmonary segment boundaries. Visual inspection and evaluation metrics from experiments conducted on a private dataset demonstrate the effectiveness of our method.
Improving Redundancy Availability: Dynamic Subtasks Modulation for Robots with Redundancy Insufficiency
Dec 10, 2020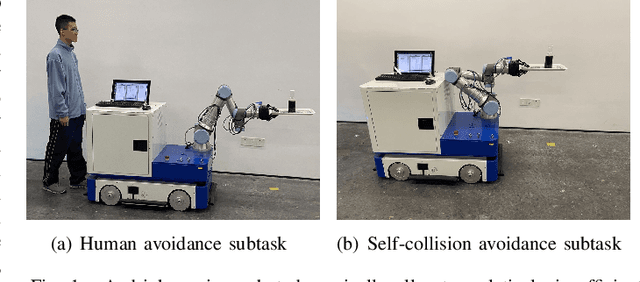
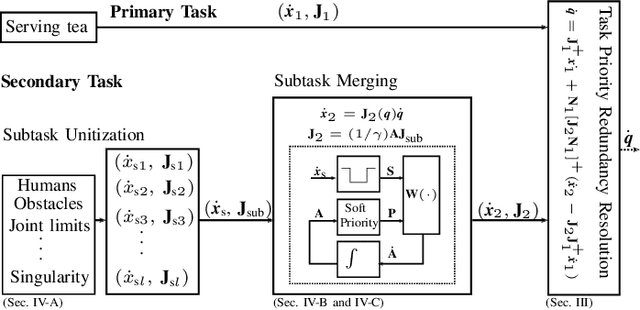
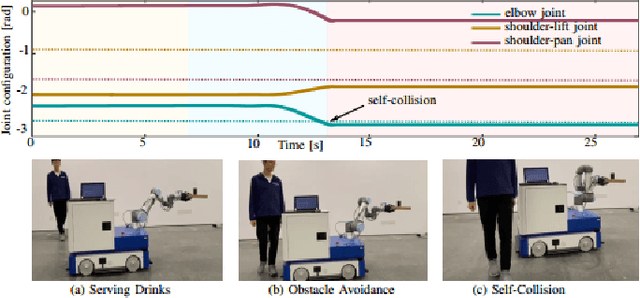
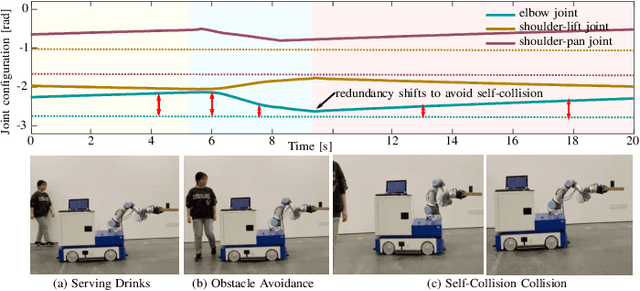
This work presents an approach for robots to suitably carry out complex applications characterized by the presence of multiple additional constraints or subtasks (e.g. obstacle and self-collision avoidance) but subject to redundancy insufficiency. The proposed approach, based on a novel subtask merging strategy, enforces all subtasks in due course by dynamically modulating a virtual secondary task, where the task status and soft priority are incorporated to improve the overall efficiency of redundancy resolution. The proposed approach greatly improves the redundancy availability by unitizing and deploying subtasks in a fine-grained and compact manner. We build up our control framework on the null space projection, which guarantees the execution of subtasks does not interfere with the primary task. Experimental results on two case studies are presented to show the performance of our approach.