 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDim Small Target Detection and Tracking: A Novel Method Based on Temporal Energy Selective Scaling and Trajectory Association
May 15, 2024



The detection and tracking of small targets in passive optical remote sensing (PORS) has broad applications. However, most of the previously proposed methods seldom utilize the abundant temporal features formed by target motion, resulting in poor detection and tracking performance for low signal-to-clutter ratio (SCR) targets. In this article, we analyze the difficulty based on spatial features and the feasibility based on temporal features of realizing effective detection. According to this analysis, we use a multi-frame as a detection unit and propose a detection method based on temporal energy selective scaling (TESS). Specifically, we investigated the composition of intensity temporal profiles (ITPs) formed by pixels on a multi-frame detection unit. For the target-present pixel, the target passing through the pixel will bring a weak transient disturbance on the ITP and introduce a change in the statistical properties of ITP. We use a well-designed function to amplify the transient disturbance, suppress the background and noise components, and output the trajectory of the target on the multi-frame detection unit. Subsequently, to solve the contradiction between the detection rate and the false alarm rate brought by the traditional threshold segmentation, we associate the temporal and spatial features of the output trajectory and propose a trajectory extraction method based on the 3D Hough transform. Finally, we model the trajectory of the target and propose a trajectory-based multi-target tracking method. Compared with the various state-of-the-art detection and tracking methods, experiments in multiple scenarios prove the superiority of our proposed methods.
Deep RL at Scale: Sorting Waste in Office Buildings with a Fleet of Mobile Manipulators
May 05, 2023



We describe a system for deep reinforcement learning of robotic manipulation skills applied to a large-scale real-world task: sorting recyclables and trash in office buildings. Real-world deployment of deep RL policies requires not only effective training algorithms, but the ability to bootstrap real-world training and enable broad generalization. To this end, our system combines scalable deep RL from real-world data with bootstrapping from training in simulation, and incorporates auxiliary inputs from existing computer vision systems as a way to boost generalization to novel objects, while retaining the benefits of end-to-end training. We analyze the tradeoffs of different design decisions in our system, and present a large-scale empirical validation that includes training on real-world data gathered over the course of 24 months of experimentation, across a fleet of 23 robots in three office buildings, with a total training set of 9527 hours of robotic experience. Our final validation also consists of 4800 evaluation trials across 240 waste station configurations, in order to evaluate in detail the impact of the design decisions in our system, the scaling effects of including more real-world data, and the performance of the method on novel objects. The projects website and videos can be found at \href{http://rl-at-scale.github.io}{rl-at-scale.github.io}.
On Designing a Learning Robot: Improving Morphology for Enhanced Task Performance and Learning
Mar 23, 2023As robots become more prevalent, optimizing their design for better performance and efficiency is becoming increasingly important. However, current robot design practices overlook the impact of perception and design choices on a robot's learning capabilities. To address this gap, we propose a comprehensive methodology that accounts for the interplay between the robot's perception, hardware characteristics, and task requirements. Our approach optimizes the robot's morphology holistically, leading to improved learning and task execution proficiency. To achieve this, we introduce a Morphology-AGnostIc Controller (MAGIC), which helps with the rapid assessment of different robot designs. The MAGIC policy is efficiently trained through a novel PRIvileged Single-stage learning via latent alignMent (PRISM) framework, which also encourages behaviors that are typical of robot onboard observation. Our simulation-based results demonstrate that morphologies optimized holistically improve the robot performance by 15-20% on various manipulation tasks, and require 25x less data to match human-expert made morphology performance. In summary, our work contributes to the growing trend of learning-based approaches in robotics and emphasizes the potential in designing robots that facilitate better learning.
Midas: A Multi-Joint Robotics Simulator with Intersection-Free Frictional Contact
Sep 30, 2022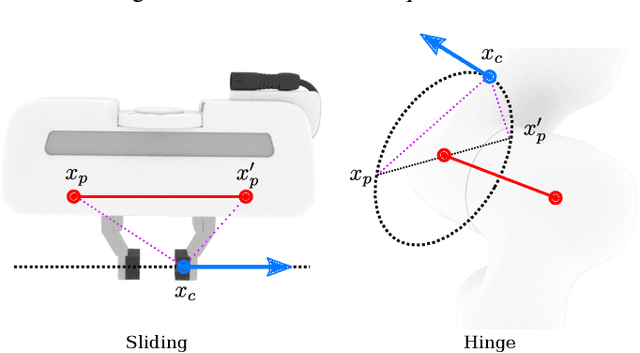
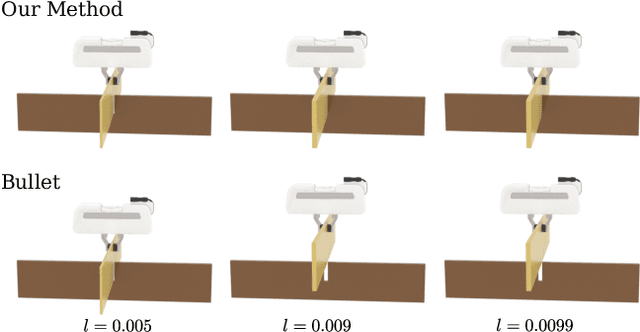

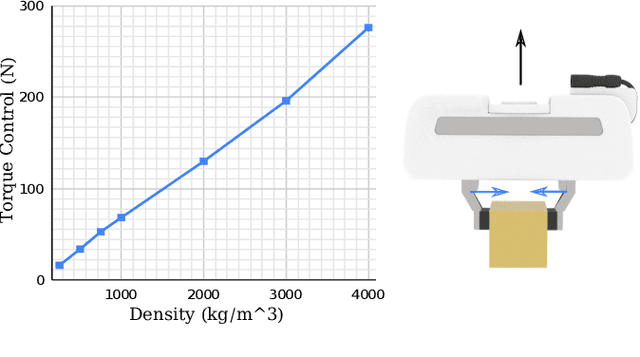
We introduce Midas, a robotics simulation framework based on the Incremental Potential Contact (IPC) model. Our simulator guarantees intersection-free, stable, and accurate resolution of frictional contact. We demonstrate the efficacy of our framework with experimental validations on high-precision tasks and through comparisons with Bullet physics. A reinforcement learning pipeline using Midas is also developed and tested to perform intersection-free peg-in-hole tasks.
COCOI: Contact-aware Online Context Inference for Generalizable Non-planar Pushing
Nov 23, 2020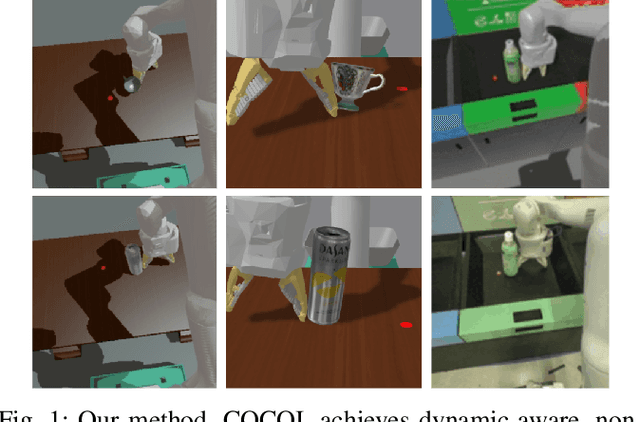
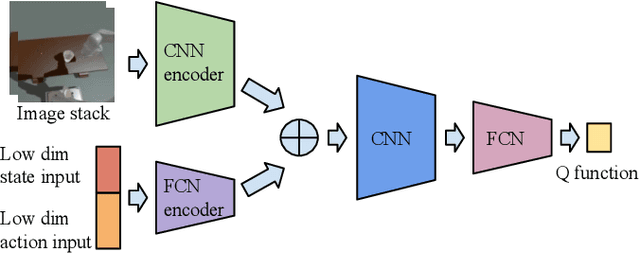
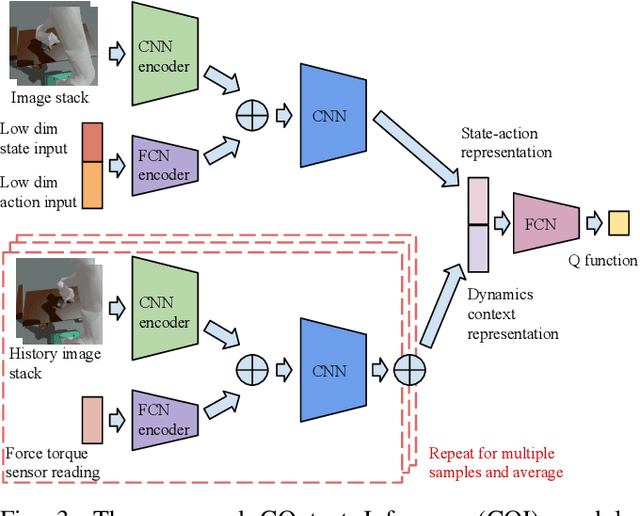
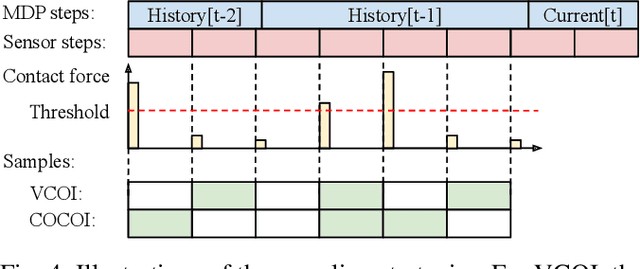
General contact-rich manipulation problems are long-standing challenges in robotics due to the difficulty of understanding complicated contact physics. Deep reinforcement learning (RL) has shown great potential in solving robot manipulation tasks. However, existing RL policies have limited adaptability to environments with diverse dynamics properties, which is pivotal in solving many contact-rich manipulation tasks. In this work, we propose Contact-aware Online COntext Inference (COCOI), a deep RL method that encodes a context embedding of dynamics properties online using contact-rich interactions. We study this method based on a novel and challenging non-planar pushing task, where the robot uses a monocular camera image and wrist force torque sensor reading to push an object to a goal location while keeping it upright. We run extensive experiments to demonstrate the capability of COCOI in a wide range of settings and dynamics properties in simulation, and also in a sim-to-real transfer scenario on a real robot (Video: https://youtu.be/nrmJYksh1Kc)