 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCosmos 3: Omnimodal World Models for Physical AI
Jun 01, 2026We introduce Cosmos 3, a family of omnimodal world models designed to jointly process and generate language, image, video, audio, and action sequences within a unified mixture-of-transformers architecture. By supporting highly flexible input-output configurations, Cosmos 3 seamlessly unifies critical modalities for Physical AI -- effectively subsuming vision-language models, video generators, world simulators, and world-action models into a single framework. Our evaluation demonstrates that Cosmos 3 establishes a new state-of-the-art across a diverse suite of understanding and generation tasks, demonstrating omnimodal world models as scalable, general-purpose backbones for embodied agents. Our post-trained Cosmos 3 models were ranked as the best open-source Text-to-Image and Image-to-Video models by Artificial Analysis, and the best policy model by RoboArena at the time the technical report was written. To accelerate open research and deployment in Physical AI, we make our code, model checkpoints, curated synthetic datasets, and evaluation benchmark available under the Linux Foundation's OpenMDW-1.1 https://openmdw.ai/license/1-1/ License at https://github.com/nvidia/cosmos}{github.com/nvidia/cosmos and https://huggingface.co/collections/nvidia/cosmos3 . The project website is available at https://research.nvidia.com/labs/cosmos-lab/cosmos3 .
Nemotron 3 Super: Open, Efficient Mixture-of-Experts Hybrid Mamba-Transformer Model for Agentic Reasoning
Apr 14, 2026We describe the pre-training, post-training, and quantization of Nemotron 3 Super, a 120 billion (active 12 billion) parameter hybrid Mamba-Attention Mixture-of-Experts model. Nemotron 3 Super is the first model in the Nemotron 3 family to 1) be pre-trained in NVFP4, 2) leverage LatentMoE, a new Mixture-of-Experts architecture that optimizes for both accuracy per FLOP and accuracy per parameter, and 3) include MTP layers for inference acceleration through native speculative decoding. We pre-trained Nemotron 3 Super on 25 trillion tokens followed by post-training using supervised fine tuning (SFT) and reinforcement learning (RL). The final model supports up to 1M context length and achieves comparable accuracy on common benchmarks, while also achieving up to 2.2x and 7.5x higher inference throughput compared to GPT-OSS-120B and Qwen3.5-122B, respectively. Nemotron 3 Super datasets, along with the base, post-trained, and quantized checkpoints, are open-sourced on HuggingFace.
Nemotron-Cascade 2: Post-Training LLMs with Cascade RL and Multi-Domain On-Policy Distillation
Mar 19, 2026We introduce Nemotron-Cascade 2, an open 30B MoE model with 3B activated parameters that delivers best-in-class reasoning and strong agentic capabilities. Despite its compact size, its mathematical and coding reasoning performance approaches that of frontier open models. It is the second open-weight LLM, after DeepSeekV3.2-Speciale-671B-A37B, to achieve Gold Medal-level performance in the 2025 International Mathematical Olympiad (IMO), the International Olympiad in Informatics (IOI), and the ICPC World Finals, demonstrating remarkably high intelligence density with 20x fewer parameters. In contrast to Nemotron-Cascade 1, the key technical advancements are as follows. After SFT on a meticulously curated dataset, we substantially expand Cascade RL to cover a much broader spectrum of reasoning and agentic domains. Furthermore, we introduce multi-domain on-policy distillation from the strongest intermediate teacher models for each domain throughout the Cascade RL process, allowing us to efficiently recover benchmark regressions and sustain strong performance gains along the way. We release the collection of model checkpoint and training data.
Nemotron-Cascade: Scaling Cascaded Reinforcement Learning for General-Purpose Reasoning Models
Dec 15, 2025



Building general-purpose reasoning models with reinforcement learning (RL) entails substantial cross-domain heterogeneity, including large variation in inference-time response lengths and verification latency. Such variability complicates the RL infrastructure, slows training, and makes training curriculum (e.g., response length extension) and hyperparameter selection challenging. In this work, we propose cascaded domain-wise reinforcement learning (Cascade RL) to develop general-purpose reasoning models, Nemotron-Cascade, capable of operating in both instruct and deep thinking modes. Departing from conventional approaches that blend heterogeneous prompts from different domains, Cascade RL orchestrates sequential, domain-wise RL, reducing engineering complexity and delivering state-of-the-art performance across a wide range of benchmarks. Notably, RLHF for alignment, when used as a pre-step, boosts the model's reasoning ability far beyond mere preference optimization, and subsequent domain-wise RLVR stages rarely degrade the benchmark performance attained in earlier domains and may even improve it (see an illustration in Figure 1). Our 14B model, after RL, outperforms its SFT teacher, DeepSeek-R1-0528, on LiveCodeBench v5/v6/Pro and achieves silver-medal performance in the 2025 International Olympiad in Informatics (IOI). We transparently share our training and data recipes.
Nemotron-H: A Family of Accurate and Efficient Hybrid Mamba-Transformer Models
Apr 10, 2025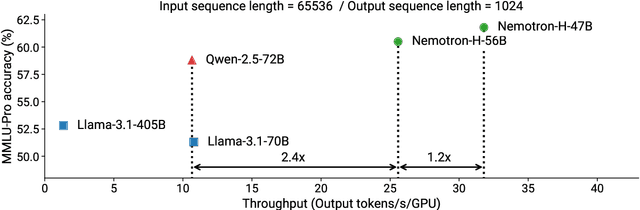

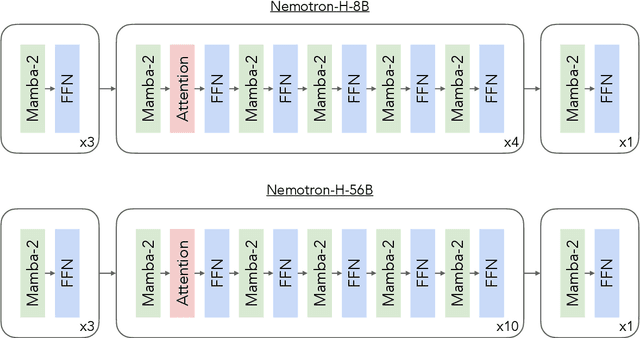
As inference-time scaling becomes critical for enhanced reasoning capabilities, it is increasingly becoming important to build models that are efficient to infer. We introduce Nemotron-H, a family of 8B and 56B/47B hybrid Mamba-Transformer models designed to reduce inference cost for a given accuracy level. To achieve this goal, we replace the majority of self-attention layers in the common Transformer model architecture with Mamba layers that perform constant computation and require constant memory per generated token. We show that Nemotron-H models offer either better or on-par accuracy compared to other similarly-sized state-of-the-art open-sourced Transformer models (e.g., Qwen-2.5-7B/72B and Llama-3.1-8B/70B), while being up to 3$\times$ faster at inference. To further increase inference speed and reduce the memory required at inference time, we created Nemotron-H-47B-Base from the 56B model using a new compression via pruning and distillation technique called MiniPuzzle. Nemotron-H-47B-Base achieves similar accuracy to the 56B model, but is 20% faster to infer. In addition, we introduce an FP8-based training recipe and show that it can achieve on par results with BF16-based training. This recipe is used to train the 56B model. All Nemotron-H models will be released, with support in Hugging Face, NeMo, and Megatron-LM.
NVLM: Open Frontier-Class Multimodal LLMs
Sep 17, 2024



We introduce NVLM 1.0, a family of frontier-class multimodal large language models (LLMs) that achieve state-of-the-art results on vision-language tasks, rivaling the leading proprietary models (e.g., GPT-4o) and open-access models (e.g., Llama 3-V 405B and InternVL 2). Remarkably, NVLM 1.0 shows improved text-only performance over its LLM backbone after multimodal training. In terms of model design, we perform a comprehensive comparison between decoder-only multimodal LLMs (e.g., LLaVA) and cross-attention-based models (e.g., Flamingo). Based on the strengths and weaknesses of both approaches, we propose a novel architecture that enhances both training efficiency and multimodal reasoning capabilities. Furthermore, we introduce a 1-D tile-tagging design for tile-based dynamic high-resolution images, which significantly boosts performance on multimodal reasoning and OCR-related tasks. Regarding training data, we meticulously curate and provide detailed information on our multimodal pretraining and supervised fine-tuning datasets. Our findings indicate that dataset quality and task diversity are more important than scale, even during the pretraining phase, across all architectures. Notably, we develop production-grade multimodality for the NVLM-1.0 models, enabling them to excel in vision-language tasks while maintaining and even improving text-only performance compared to their LLM backbones. To achieve this, we craft and integrate a high-quality text-only dataset into multimodal training, alongside a substantial amount of multimodal math and reasoning data, leading to enhanced math and coding capabilities across modalities. To advance research in the field, we are releasing the model weights and will open-source the code for the community: https://nvlm-project.github.io/.
Negative Object Presence Evaluation (NOPE) to Measure Object Hallucination in Vision-Language Models
Oct 09, 2023



Object hallucination poses a significant challenge in vision-language (VL) models, often leading to the generation of nonsensical or unfaithful responses with non-existent objects. However, the absence of a general measurement for evaluating object hallucination in VL models has hindered our understanding and ability to mitigate this issue. In this work, we present NOPE (Negative Object Presence Evaluation), a novel benchmark designed to assess object hallucination in VL models through visual question answering (VQA). We propose a cost-effective and scalable approach utilizing large language models to generate 29.5k synthetic negative pronoun (NegP) data of high quality for NOPE. We extensively investigate the performance of 10 state-of-the-art VL models in discerning the non-existence of objects in visual questions, where the ground truth answers are denoted as NegP (e.g., "none"). Additionally, we evaluate their standard performance on visual questions on 9 other VQA datasets. Through our experiments, we demonstrate that no VL model is immune to the vulnerability of object hallucination, as all models achieve accuracy below 10\% on NegP. Furthermore, we uncover that lexically diverse visual questions, question types with large scopes, and scene-relevant objects capitalize the risk of object hallucination in VL models.
Survey of Social Bias in Vision-Language Models
Sep 24, 2023In recent years, the rapid advancement of machine learning (ML) models, particularly transformer-based pre-trained models, has revolutionized Natural Language Processing (NLP) and Computer Vision (CV) fields. However, researchers have discovered that these models can inadvertently capture and reinforce social biases present in their training datasets, leading to potential social harms, such as uneven resource allocation and unfair representation of specific social groups. Addressing these biases and ensuring fairness in artificial intelligence (AI) systems has become a critical concern in the ML community. The recent introduction of pre-trained vision-and-language (VL) models in the emerging multimodal field demands attention to the potential social biases present in these models as well. Although VL models are susceptible to social bias, there is a limited understanding compared to the extensive discussions on bias in NLP and CV. This survey aims to provide researchers with a high-level insight into the similarities and differences of social bias studies in pre-trained models across NLP, CV, and VL. By examining these perspectives, the survey aims to offer valuable guidelines on how to approach and mitigate social bias in both unimodal and multimodal settings. The findings and recommendations presented here can benefit the ML community, fostering the development of fairer and non-biased AI models in various applications and research endeavors.
Visual Instruction Tuning with Polite Flamingo
Jul 03, 2023



Recent research has demonstrated that the multi-task fine-tuning of multi-modal Large Language Models (LLMs) using an assortment of annotated downstream vision-language datasets significantly enhances their performance. Yet, during this process, a side effect, which we termed as the "multi-modal alignment tax", surfaces. This side effect negatively impacts the model's ability to format responses appropriately -- for instance, its "politeness" -- due to the overly succinct and unformatted nature of raw annotations, resulting in reduced human preference. In this paper, we introduce Polite Flamingo, a multi-modal response rewriter that transforms raw annotations into a more appealing, "polite" format. Polite Flamingo is trained to reconstruct high-quality responses from their automatically distorted counterparts and is subsequently applied to a vast array of vision-language datasets for response rewriting. After rigorous filtering, we generate the PF-1M dataset and further validate its value by fine-tuning a multi-modal LLM with it. Combined with novel methodologies including U-shaped multi-stage tuning and multi-turn augmentation, the resulting model, Clever Flamingo, demonstrates its advantages in both multi-modal understanding and response politeness according to automated and human evaluations.
InstructBLIP: Towards General-purpose Vision-Language Models with Instruction Tuning
May 11, 2023



General-purpose language models that can solve various language-domain tasks have emerged driven by the pre-training and instruction-tuning pipeline. However, building general-purpose vision-language models is challenging due to the increased task discrepancy introduced by the additional visual input. Although vision-language pre-training has been widely studied, vision-language instruction tuning remains relatively less explored. In this paper, we conduct a systematic and comprehensive study on vision-language instruction tuning based on the pre-trained BLIP-2 models. We gather a wide variety of 26 publicly available datasets, transform them into instruction tuning format and categorize them into two clusters for held-in instruction tuning and held-out zero-shot evaluation. Additionally, we introduce instruction-aware visual feature extraction, a crucial method that enables the model to extract informative features tailored to the given instruction. The resulting InstructBLIP models achieve state-of-the-art zero-shot performance across all 13 held-out datasets, substantially outperforming BLIP-2 and the larger Flamingo. Our models also lead to state-of-the-art performance when finetuned on individual downstream tasks (e.g., 90.7% accuracy on ScienceQA IMG). Furthermore, we qualitatively demonstrate the advantages of InstructBLIP over concurrent multimodal models. All InstructBLIP models have been open-sourced at https://github.com/salesforce/LAVIS/tree/main/projects/instructblip.