 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOrdered Genetic Algorithm for Entrance Dependent Vehicle Routing Problem in Farms
Feb 26, 2025Vehicle Routing Problems (VRP) are widely studied issues that play important roles in many production scenarios. We have noticed that in some practical scenarios of VRP, the size of cities and their entrances can significantly influence the optimization process. To address this, we have constructed the Entrance Dependent VRP (EDVRP) to describe such problems. We provide a mathematical formulation for the EDVRP in farms and propose an Ordered Genetic Algorithm (OGA) to solve it. The effectiveness of OGA is demonstrated through our experiments, which involve a multitude of randomly generated cases. The results indicate that OGA offers certain advantages compared to a random strategy baseline and a genetic algorithm without ordering. Furthermore, the novel operators introduced in this paper have been validated through ablation experiments, proving their effectiveness in enhancing the performance of the algorithm.
Baichuan-Audio: A Unified Framework for End-to-End Speech Interaction
Feb 24, 2025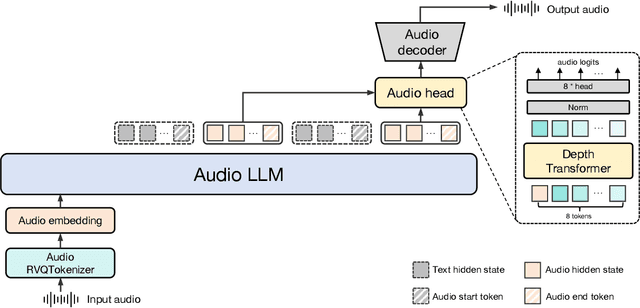

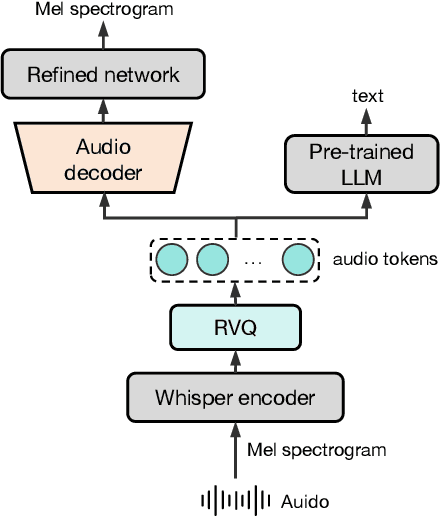

We introduce Baichuan-Audio, an end-to-end audio large language model that seamlessly integrates audio understanding and generation. It features a text-guided aligned speech generation mechanism, enabling real-time speech interaction with both comprehension and generation capabilities. Baichuan-Audio leverages a pre-trained ASR model, followed by multi-codebook discretization of speech at a frame rate of 12.5 Hz. This multi-codebook setup ensures that speech tokens retain both semantic and acoustic information. To further enhance modeling, an independent audio head is employed to process audio tokens, effectively capturing their unique characteristics. To mitigate the loss of intelligence during pre-training and preserve the original capabilities of the LLM, we propose a two-stage pre-training strategy that maintains language understanding while enhancing audio modeling. Following alignment, the model excels in real-time speech-based conversation and exhibits outstanding question-answering capabilities, demonstrating its versatility and efficiency. The proposed model demonstrates superior performance in real-time spoken dialogue and exhibits strong question-answering abilities. Our code, model and training data are available at https://github.com/baichuan-inc/Baichuan-Audio
UNIP: Rethinking Pre-trained Attention Patterns for Infrared Semantic Segmentation
Feb 04, 2025



Pre-training techniques significantly enhance the performance of semantic segmentation tasks with limited training data. However, the efficacy under a large domain gap between pre-training (e.g. RGB) and fine-tuning (e.g. infrared) remains underexplored. In this study, we first benchmark the infrared semantic segmentation performance of various pre-training methods and reveal several phenomena distinct from the RGB domain. Next, our layerwise analysis of pre-trained attention maps uncovers that: (1) There are three typical attention patterns (local, hybrid, and global); (2) Pre-training tasks notably influence the pattern distribution across layers; (3) The hybrid pattern is crucial for semantic segmentation as it attends to both nearby and foreground elements; (4) The texture bias impedes model generalization in infrared tasks. Building on these insights, we propose UNIP, a UNified Infrared Pre-training framework, to enhance the pre-trained model performance. This framework uses the hybrid-attention distillation NMI-HAD as the pre-training target, a large-scale mixed dataset InfMix for pre-training, and a last-layer feature pyramid network LL-FPN for fine-tuning. Experimental results show that UNIP outperforms various pre-training methods by up to 13.5\% in average mIoU on three infrared segmentation tasks, evaluated using fine-tuning and linear probing metrics. UNIP-S achieves performance on par with MAE-L while requiring only 1/10 of the computational cost. Furthermore, UNIP significantly surpasses state-of-the-art (SOTA) infrared or RGB segmentation methods and demonstrates broad potential for application in other modalities, such as RGB and depth. Our code is available at https://github.com/casiatao/UNIP.
T-SCEND: Test-time Scalable MCTS-enhanced Diffusion Model
Feb 04, 2025



We introduce Test-time Scalable MCTS-enhanced Diffusion Model (T-SCEND), a novel framework that significantly improves diffusion model's reasoning capabilities with better energy-based training and scaling up test-time computation. We first show that na\"ively scaling up inference budget for diffusion models yields marginal gain. To address this, the training of T-SCEND consists of a novel linear-regression negative contrastive learning objective to improve the performance-energy consistency of the energy landscape, and a KL regularization to reduce adversarial sampling. During inference, T-SCEND integrates the denoising process with a novel hybrid Monte Carlo Tree Search (hMCTS), which sequentially performs best-of-N random search and MCTS as denoising proceeds. On challenging reasoning tasks of Maze and Sudoku, we demonstrate the effectiveness of T-SCEND's training objective and scalable inference method. In particular, trained with Maze sizes of up to $6\times6$, our T-SCEND solves $88\%$ of Maze problems with much larger sizes of $15\times15$, while standard diffusion completely fails.Code to reproduce the experiments can be found at https://github.com/AI4Science-WestlakeU/t_scend.
From Uncertain to Safe: Conformal Fine-Tuning of Diffusion Models for Safe PDE Control
Feb 04, 2025



The application of deep learning for partial differential equation (PDE)-constrained control is gaining increasing attention. However, existing methods rarely consider safety requirements crucial in real-world applications. To address this limitation, we propose Safe Diffusion Models for PDE Control (SafeDiffCon), which introduce the uncertainty quantile as model uncertainty quantification to achieve optimal control under safety constraints through both post-training and inference phases. Firstly, our approach post-trains a pre-trained diffusion model to generate control sequences that better satisfy safety constraints while achieving improved control objectives via a reweighted diffusion loss, which incorporates the uncertainty quantile estimated using conformal prediction. Secondly, during inference, the diffusion model dynamically adjusts both its generation process and parameters through iterative guidance and fine-tuning, conditioned on control targets while simultaneously integrating the estimated uncertainty quantile. We evaluate SafeDiffCon on three control tasks: 1D Burgers' equation, 2D incompressible fluid, and controlled nuclear fusion problem. Results demonstrate that SafeDiffCon is the only method that satisfies all safety constraints, whereas other classical and deep learning baselines fail. Furthermore, while adhering to safety constraints, SafeDiffCon achieves the best control performance.
Diffusion Model as a Noise-Aware Latent Reward Model for Step-Level Preference Optimization
Feb 03, 2025



Preference optimization for diffusion models aims to align them with human preferences for images. Previous methods typically leverage Vision-Language Models (VLMs) as pixel-level reward models to approximate human preferences. However, when used for step-level preference optimization, these models face challenges in handling noisy images of different timesteps and require complex transformations into pixel space. In this work, we demonstrate that diffusion models are inherently well-suited for step-level reward modeling in the latent space, as they can naturally extract features from noisy latent images. Accordingly, we propose the Latent Reward Model (LRM), which repurposes components of diffusion models to predict preferences of latent images at various timesteps. Building on LRM, we introduce Latent Preference Optimization (LPO), a method designed for step-level preference optimization directly in the latent space. Experimental results indicate that LPO not only significantly enhances performance in aligning diffusion models with general, aesthetic, and text-image alignment preferences, but also achieves 2.5-28$\times$ training speedup compared to existing preference optimization methods. Our code will be available at https://github.com/casiatao/LPO.
Ocean-OCR: Towards General OCR Application via a Vision-Language Model
Jan 26, 2025



Multimodal large language models (MLLMs) have shown impressive capabilities across various domains, excelling in processing and understanding information from multiple modalities. Despite the rapid progress made previously, insufficient OCR ability hinders MLLMs from excelling in text-related tasks. In this paper, we present \textbf{Ocean-OCR}, a 3B MLLM with state-of-the-art performance on various OCR scenarios and comparable understanding ability on general tasks. We employ Native Resolution ViT to enable variable resolution input and utilize a substantial collection of high-quality OCR datasets to enhance the model performance. We demonstrate the superiority of Ocean-OCR through comprehensive experiments on open-source OCR benchmarks and across various OCR scenarios. These scenarios encompass document understanding, scene text recognition, and handwritten recognition, highlighting the robust OCR capabilities of Ocean-OCR. Note that Ocean-OCR is the first MLLM to outperform professional OCR models such as TextIn and PaddleOCR.
Baichuan-Omni-1.5 Technical Report
Jan 26, 2025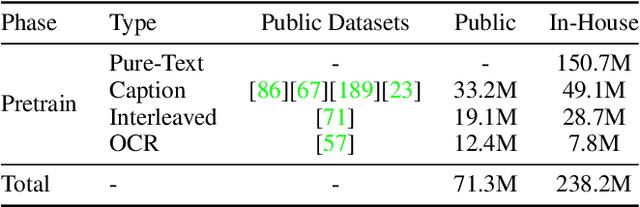
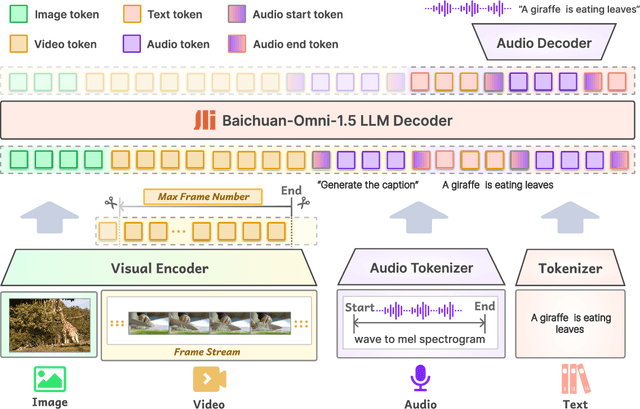
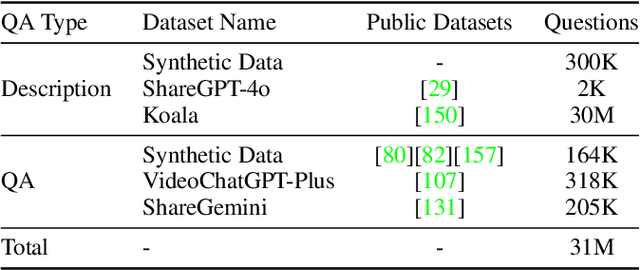
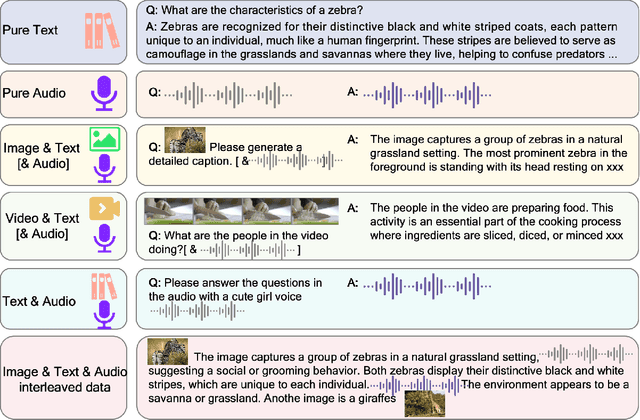
We introduce Baichuan-Omni-1.5, an omni-modal model that not only has omni-modal understanding capabilities but also provides end-to-end audio generation capabilities. To achieve fluent and high-quality interaction across modalities without compromising the capabilities of any modality, we prioritized optimizing three key aspects. First, we establish a comprehensive data cleaning and synthesis pipeline for multimodal data, obtaining about 500B high-quality data (text, audio, and vision). Second, an audio-tokenizer (Baichuan-Audio-Tokenizer) has been designed to capture both semantic and acoustic information from audio, enabling seamless integration and enhanced compatibility with MLLM. Lastly, we designed a multi-stage training strategy that progressively integrates multimodal alignment and multitask fine-tuning, ensuring effective synergy across all modalities. Baichuan-Omni-1.5 leads contemporary models (including GPT4o-mini and MiniCPM-o 2.6) in terms of comprehensive omni-modal capabilities. Notably, it achieves results comparable to leading models such as Qwen2-VL-72B across various multimodal medical benchmarks.
Are They the Same? Exploring Visual Correspondence Shortcomings of Multimodal LLMs
Jan 08, 2025



Recent advancements in multimodal models have shown a strong ability in visual perception, reasoning abilities, and vision-language understanding. However, studies on visual matching ability are missing, where finding the visual correspondence of objects is essential in vision research. Our research reveals that the matching capabilities in recent multimodal LLMs (MLLMs) still exhibit systematic shortcomings, even with current strong MLLMs models, GPT-4o. In particular, we construct a Multimodal Visual Matching (MMVM) benchmark to fairly benchmark over 30 different MLLMs. The MMVM benchmark is built from 15 open-source datasets and Internet videos with manual annotation. We categorize the data samples of MMVM benchmark into eight aspects based on the required cues and capabilities to more comprehensively evaluate and analyze current MLLMs. In addition, we have designed an automatic annotation pipeline to generate the MMVM SFT dataset, including 220K visual matching data with reasoning annotation. Finally, we present CoLVA, a novel contrastive MLLM with two novel technical designs: fine-grained vision expert with object-level contrastive learning and instruction augmentation strategy. CoLVA achieves 51.06\% overall accuracy (OA) on the MMVM benchmark, surpassing GPT-4o and baseline by 8.41\% and 23.58\% OA, respectively. The results show the effectiveness of our MMVM SFT dataset and our novel technical designs. Code, benchmark, dataset, and models are available at https://github.com/zhouyiks/CoLVA.
Sa2VA: Marrying SAM2 with LLaVA for Dense Grounded Understanding of Images and Videos
Jan 07, 2025



This work presents Sa2VA, the first unified model for dense grounded understanding of both images and videos. Unlike existing multi-modal large language models, which are often limited to specific modalities and tasks, Sa2VA supports a wide range of image and video tasks, including referring segmentation and conversation, with minimal one-shot instruction tuning. Sa2VA combines SAM-2, a foundation video segmentation model, with LLaVA, an advanced vision-language model, and unifies text, image, and video into a shared LLM token space. Using the LLM, Sa2VA generates instruction tokens that guide SAM-2 in producing precise masks, enabling a grounded, multi-modal understanding of both static and dynamic visual content. Additionally, we introduce Ref-SAV, an auto-labeled dataset containing over 72k object expressions in complex video scenes, designed to boost model performance. We also manually validate 2k video objects in the Ref-SAV datasets to benchmark referring video object segmentation in complex environments. Experiments show that Sa2VA achieves state-of-the-art across multiple tasks, particularly in referring video object segmentation, highlighting its potential for complex real-world applications.