 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistill: Uncovering the True Intent behind Human-Robot Communication
May 14, 2026As robots become increasingly integrated into everyday environments, intuitive communication paradigms such as natural language and end-user programming have become indispensable for specifying autonomous robot behavior. However, these mechanisms are ineffective at fully capturing user intent: natural language is imprecise and ambiguous, whereas end-user programming can be overly specific. As a result, understanding what users truly mean when they interact with robots remains a central challenge for human-AI communication systems. To address this issue, we propose the Distill approach for human-robot communication interfaces. Given a task specification provided by the user, Distill (1) removes unnecessary steps; (2) generalizes the meaning behind individual steps; and (3) relaxes ordering constraints between steps. We implemented Distill on a web interface and, through a crowdsourcing study, demonstrated its ability to elicit and refine user intent from initial task specifications.
Learning Perturbations to Extrapolate Your LLM
May 13, 2026Recent advancements in large language models demonstrate that injecting perturbations can substantially enhance extrapolation performance. However, current approaches often rely on discrete perturbations with fixed designs, which limits their flexibility. In this work, we propose a framework where token prefixes are perturbed by a learnable transformation of a continuous latent vector within an embedding space. To overcome the challenge of an intractable marginal likelihood, we derive unbiased estimating equations for model parameters and optimize them via stochastic gradient descent. We establish the statistical properties of the resulting estimator in over-parameterized regimes. Empirical evaluations on both synthetic and real-world datasets demonstrate that our proposal yields significant gains in out-of-domain settings over a range of state-of-the-art baseline methods.
Robust Sequential Experimental Design for A/B Testing
May 13, 2026Experimental design has emerged as a powerful approach for improving the sample efficiency of A/B testing, yet existing designs rely critically on correctly specified models. We study robust sequential experimental design under model misspecification and develop a unified framework that covers both contextual bandit and dynamic settings. Theoretically, we prove that our design bounds the worst-case mean squared error of the estimated treatment effect. Empirically, we demonstrate the effectiveness of the proposed approach using synthetic and real-world datasets from a leading technology company.
Riemannian Motion Generation: A Unified Framework for Human Motion Representation and Generation via Riemannian Flow Matching
Mar 16, 2026Human motion generation is often learned in Euclidean spaces, although valid motions follow structured non-Euclidean geometry. We present Riemannian Motion Generation (RMG), a unified framework that represents motion on a product manifold and learns dynamics via Riemannian flow matching. RMG factorizes motion into several manifold factors, yielding a scale-free representation with intrinsic normalization, and uses geodesic interpolation, tangent-space supervision, and manifold-preserving ODE integration for training and sampling. On HumanML3D, RMG achieves state-of-the-art FID in the HumanML3D format (0.043) and ranks first on all reported metrics under the MotionStreamer format. On MotionMillion, it also surpasses strong baselines (FID 5.6, R@1 0.86). Ablations show that the compact $\mathscr{T}+\mathscr{R}$ (translation + rotations) representation is the most stable and effective, highlighting geometry-aware modeling as a practical and scalable route to high-fidelity motion generation.
Designing Time Series Experiments in A/B Testing with Transformer Reinforcement Learning
Feb 02, 2026A/B testing has become a gold standard for modern technological companies to conduct policy evaluation. Yet, its application to time series experiments, where policies are sequentially assigned over time, remains challenging. Existing designs suffer from two limitations: (i) they do not fully leverage the entire history for treatment allocation; (ii) they rely on strong assumptions to approximate the objective function (e.g., the mean squared error of the estimated treatment effect) for optimizing the design. We first establish an impossibility theorem showing that failure to condition on the full history leads to suboptimal designs, due to the dynamic dependencies in time series experiments. To address both limitations simultaneously, we next propose a transformer reinforcement learning (RL) approach which leverages transformers to condition allocation on the entire history and employs RL to directly optimize the MSE without relying on restrictive assumptions. Empirical evaluations on synthetic data, a publicly available dispatch simulator, and a real-world ridesharing dataset demonstrate that our proposal consistently outperforms existing designs.
Systematic validation of time-resolved diffuse optical simulators via non-contact SPAD-based measurements
Nov 17, 2025



Objective: Time-domain diffuse optical imaging (DOI) requires accurate forward models for photon propagation in scattering media. However, existing simulators lack comprehensive experimental validation, especially for non-contact configurations with oblique illumination. This study rigorously evaluates three widely used open-source simulators, including MMC, NIRFASTer, and Toast++, using time-resolved experimental data. Approach: All simulations employed a unified mesh and point-source illumination. Virtual source correction was applied to FEM solvers for oblique incidence. A time-resolved DOI system with a 32 $\times$ 32 single-photon avalanche diode (SPAD) array acquired transmission-mode data from 16 standardized phantoms with varying absorption coefficient $μ_a$ and reduced scattering coefficient $μ_s'$. The simulation results were quantified across five metrics: spatial-domain (SD) precision, time-domain (TD) precision, oblique beam accuracy, computational speed, and mesh-density independence. Results: Among three simulators, MMC achieves superior accuracy in SD and TD metrics, and shows robustness across all optical properties. NIRFASTer and Toast++ demonstrate comparable overall performance. In general, MMC is optimal for accuracy-critical TD-DOI applications, while NIRFASTer and Toast++ suit scenarios prioritizing speed with sufficiently large $μ_s'$. Besides, virtual source correction is essential for non-contact FEM modeling, which reduced average errors by > 34% in large-angle scenarios. Significance: This work provides benchmarked guidelines for simulator selection during the development phase of next-generation TD-DOI systems. Our work represents the first study to systematically validate TD simulators against SPAD array-based data under clinically relevant non-contact conditions, bridging a critical gap in biomedical optical simulation standards.
Knowledge-Augmented Question Error Correction for Chinese Question Answer System with QuestionRAG
Nov 05, 2025Input errors in question-answering (QA) systems often lead to incorrect responses. Large language models (LLMs) struggle with this task, frequently failing to interpret user intent (misinterpretation) or unnecessarily altering the original question's structure (over-correction). We propose QuestionRAG, a framework that tackles these problems. To address misinterpretation, it enriches the input with external knowledge (e.g., search results, related entities). To prevent over-correction, it uses reinforcement learning (RL) to align the model's objective with precise correction, not just paraphrasing. Our results demonstrate that knowledge augmentation is critical for understanding faulty questions. Furthermore, RL-based alignment proves significantly more effective than traditional supervised fine-tuning (SFT), boosting the model's ability to follow instructions and generalize. By integrating these two strategies, QuestionRAG unlocks the full potential of LLMs for the question correction task.
DeepSuM: Deep Sufficient Modality Learning Framework
Mar 03, 2025



Multimodal learning has become a pivotal approach in developing robust learning models with applications spanning multimedia, robotics, large language models, and healthcare. The efficiency of multimodal systems is a critical concern, given the varying costs and resource demands of different modalities. This underscores the necessity for effective modality selection to balance performance gains against resource expenditures. In this study, we propose a novel framework for modality selection that independently learns the representation of each modality. This approach allows for the assessment of each modality's significance within its unique representation space, enabling the development of tailored encoders and facilitating the joint analysis of modalities with distinct characteristics. Our framework aims to enhance the efficiency and effectiveness of multimodal learning by optimizing modality integration and selection.
Baichuan-Omni-1.5 Technical Report
Jan 26, 2025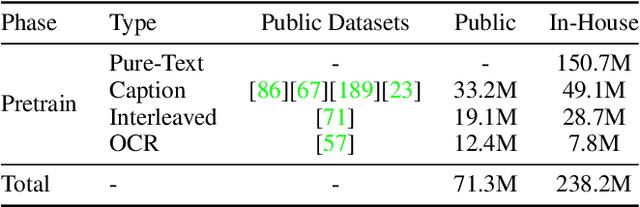
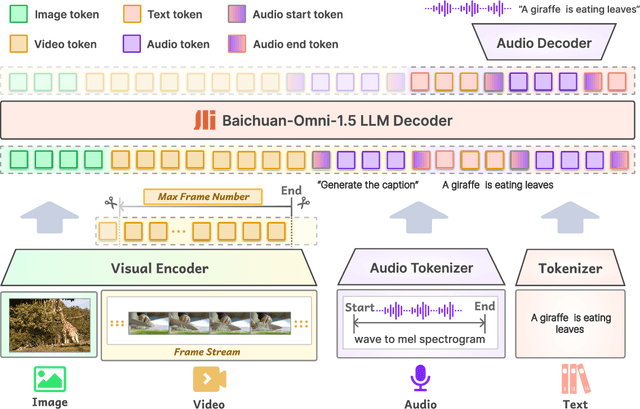
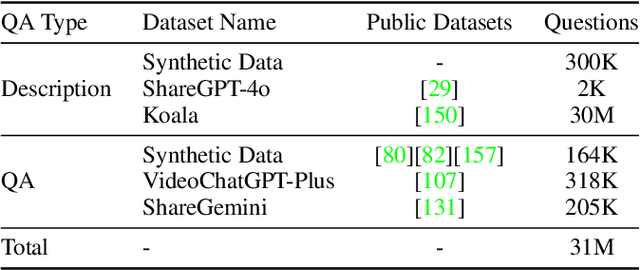
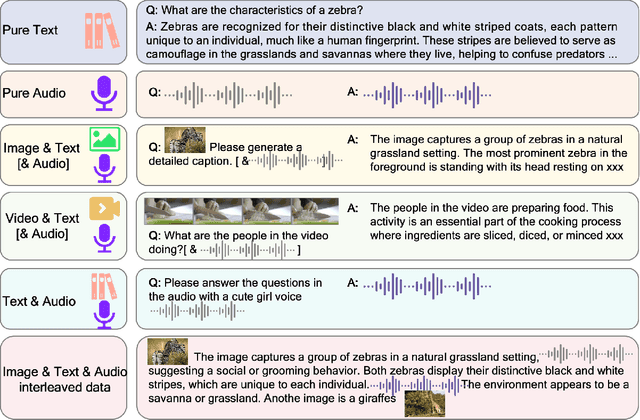
We introduce Baichuan-Omni-1.5, an omni-modal model that not only has omni-modal understanding capabilities but also provides end-to-end audio generation capabilities. To achieve fluent and high-quality interaction across modalities without compromising the capabilities of any modality, we prioritized optimizing three key aspects. First, we establish a comprehensive data cleaning and synthesis pipeline for multimodal data, obtaining about 500B high-quality data (text, audio, and vision). Second, an audio-tokenizer (Baichuan-Audio-Tokenizer) has been designed to capture both semantic and acoustic information from audio, enabling seamless integration and enhanced compatibility with MLLM. Lastly, we designed a multi-stage training strategy that progressively integrates multimodal alignment and multitask fine-tuning, ensuring effective synergy across all modalities. Baichuan-Omni-1.5 leads contemporary models (including GPT4o-mini and MiniCPM-o 2.6) in terms of comprehensive omni-modal capabilities. Notably, it achieves results comparable to leading models such as Qwen2-VL-72B across various multimodal medical benchmarks.
Two-way Node Popularity Model for Directed and Bipartite Networks
Dec 11, 2024



There has been extensive research on community detection in directed and bipartite networks. However, these studies often fail to consider the popularity of nodes in different communities, which is a common phenomenon in real-world networks. To address this issue, we propose a new probabilistic framework called the Two-Way Node Popularity Model (TNPM). The TNPM also accommodates edges from different distributions within a general sub-Gaussian family. We introduce the Delete-One-Method (DOM) for model fitting and community structure identification, and provide a comprehensive theoretical analysis with novel technical skills dealing with sub-Gaussian generalization. Additionally, we propose the Two-Stage Divided Cosine Algorithm (TSDC) to handle large-scale networks more efficiently. Our proposed methods offer multi-folded advantages in terms of estimation accuracy and computational efficiency, as demonstrated through extensive numerical studies. We apply our methods to two real-world applications, uncovering interesting findings.