 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIG Captioner: Information Gain Captioners are Strong Zero-shot Classifiers
Nov 27, 2023



Generative training has been demonstrated to be powerful for building visual-language models. However, on zero-shot discriminative benchmarks, there is still a performance gap between models trained with generative and discriminative objectives. In this paper, we aim to narrow this gap by improving the efficacy of generative training on classification tasks, without any finetuning processes or additional modules. Specifically, we focus on narrowing the gap between the generative captioner and the CLIP classifier. We begin by analysing the predictions made by the captioner and classifier and observe that the caption generation inherits the distribution bias from the language model trained with pure text modality, making it less grounded on the visual signal. To tackle this problem, we redesign the scoring objective for the captioner to alleviate the distributional bias and focus on measuring the gain of information brought by the visual inputs. We further design a generative training objective to match the evaluation objective. We name our model trained and evaluated from the novel procedures as Information Gain (IG) captioner. We pretrain the models on the public Laion-5B dataset and perform a series of discriminative evaluations. For the zero-shot classification on ImageNet, IG captioner achieves $> 18\%$ improvements over the standard captioner, achieving comparable performances with the CLIP classifier. IG captioner also demonstrated strong performance on zero-shot image-text retrieval tasks on MSCOCO and Flickr30K. We hope this paper inspires further research towards unifying generative and discriminative training procedures for visual-language models.
PolyMaX: General Dense Prediction with Mask Transformer
Nov 09, 2023



Dense prediction tasks, such as semantic segmentation, depth estimation, and surface normal prediction, can be easily formulated as per-pixel classification (discrete outputs) or regression (continuous outputs). This per-pixel prediction paradigm has remained popular due to the prevalence of fully convolutional networks. However, on the recent frontier of segmentation task, the community has been witnessing a shift of paradigm from per-pixel prediction to cluster-prediction with the emergence of transformer architectures, particularly the mask transformers, which directly predicts a label for a mask instead of a pixel. Despite this shift, methods based on the per-pixel prediction paradigm still dominate the benchmarks on the other dense prediction tasks that require continuous outputs, such as depth estimation and surface normal prediction. Motivated by the success of DORN and AdaBins in depth estimation, achieved by discretizing the continuous output space, we propose to generalize the cluster-prediction based method to general dense prediction tasks. This allows us to unify dense prediction tasks with the mask transformer framework. Remarkably, the resulting model PolyMaX demonstrates state-of-the-art performance on three benchmarks of NYUD-v2 dataset. We hope our simple yet effective design can inspire more research on exploiting mask transformers for more dense prediction tasks. Code and model will be made available.
De-Diffusion Makes Text a Strong Cross-Modal Interface
Nov 01, 2023



We demonstrate text as a strong cross-modal interface. Rather than relying on deep embeddings to connect image and language as the interface representation, our approach represents an image as text, from which we enjoy the interpretability and flexibility inherent to natural language. We employ an autoencoder that uses a pre-trained text-to-image diffusion model for decoding. The encoder is trained to transform an input image into text, which is then fed into the fixed text-to-image diffusion decoder to reconstruct the original input -- a process we term De-Diffusion. Experiments validate both the precision and comprehensiveness of De-Diffusion text representing images, such that it can be readily ingested by off-the-shelf text-to-image tools and LLMs for diverse multi-modal tasks. For example, a single De-Diffusion model can generalize to provide transferable prompts for different text-to-image tools, and also achieves a new state of the art on open-ended vision-language tasks by simply prompting large language models with few-shot examples.
Superpixel Transformers for Efficient Semantic Segmentation
Oct 02, 2023



Semantic segmentation, which aims to classify every pixel in an image, is a key task in machine perception, with many applications across robotics and autonomous driving. Due to the high dimensionality of this task, most existing approaches use local operations, such as convolutions, to generate per-pixel features. However, these methods are typically unable to effectively leverage global context information due to the high computational costs of operating on a dense image. In this work, we propose a solution to this issue by leveraging the idea of superpixels, an over-segmentation of the image, and applying them with a modern transformer framework. In particular, our model learns to decompose the pixel space into a spatially low dimensional superpixel space via a series of local cross-attentions. We then apply multi-head self-attention to the superpixels to enrich the superpixel features with global context and then directly produce a class prediction for each superpixel. Finally, we directly project the superpixel class predictions back into the pixel space using the associations between the superpixels and the image pixel features. Reasoning in the superpixel space allows our method to be substantially more computationally efficient compared to convolution-based decoder methods. Yet, our method achieves state-of-the-art performance in semantic segmentation due to the rich superpixel features generated by the global self-attention mechanism. Our experiments on Cityscapes and ADE20K demonstrate that our method matches the state of the art in terms of accuracy, while outperforming in terms of model parameters and latency.
PaLM 2 Technical Report
May 17, 2023



We introduce PaLM 2, a new state-of-the-art language model that has better multilingual and reasoning capabilities and is more compute-efficient than its predecessor PaLM. PaLM 2 is a Transformer-based model trained using a mixture of objectives. Through extensive evaluations on English and multilingual language, and reasoning tasks, we demonstrate that PaLM 2 has significantly improved quality on downstream tasks across different model sizes, while simultaneously exhibiting faster and more efficient inference compared to PaLM. This improved efficiency enables broader deployment while also allowing the model to respond faster, for a more natural pace of interaction. PaLM 2 demonstrates robust reasoning capabilities exemplified by large improvements over PaLM on BIG-Bench and other reasoning tasks. PaLM 2 exhibits stable performance on a suite of responsible AI evaluations, and enables inference-time control over toxicity without additional overhead or impact on other capabilities. Overall, PaLM 2 achieves state-of-the-art performance across a diverse set of tasks and capabilities. When discussing the PaLM 2 family, it is important to distinguish between pre-trained models (of various sizes), fine-tuned variants of these models, and the user-facing products that use these models. In particular, user-facing products typically include additional pre- and post-processing steps. Additionally, the underlying models may evolve over time. Therefore, one should not expect the performance of user-facing products to exactly match the results reported in this report.
MOAT: Alternating Mobile Convolution and Attention Brings Strong Vision Models
Oct 04, 2022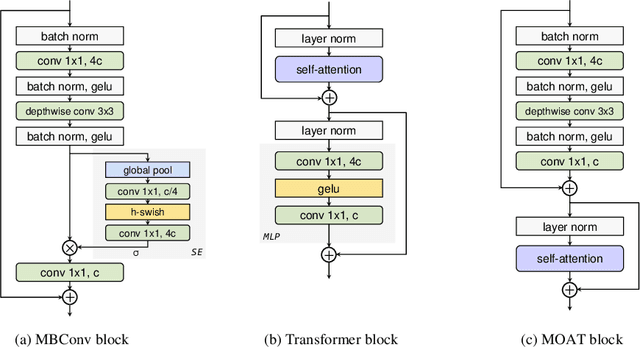

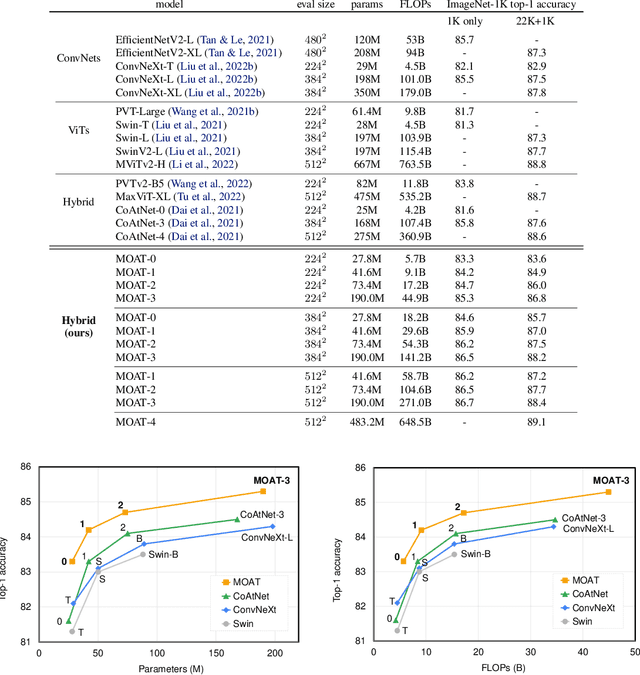
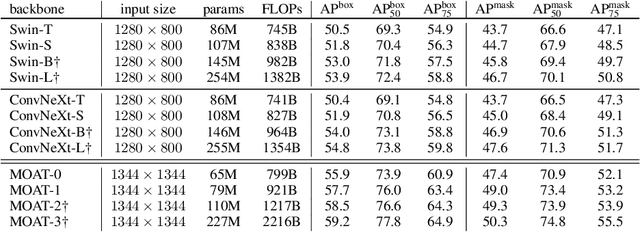
This paper presents MOAT, a family of neural networks that build on top of MObile convolution (i.e., inverted residual blocks) and ATtention. Unlike the current works that stack separate mobile convolution and transformer blocks, we effectively merge them into a MOAT block. Starting with a standard Transformer block, we replace its multi-layer perceptron with a mobile convolution block, and further reorder it before the self-attention operation. The mobile convolution block not only enhances the network representation capacity, but also produces better downsampled features. Our conceptually simple MOAT networks are surprisingly effective, achieving 89.1% top-1 accuracy on ImageNet-1K with ImageNet-22K pretraining. Additionally, MOAT can be seamlessly applied to downstream tasks that require large resolution inputs by simply converting the global attention to window attention. Thanks to the mobile convolution that effectively exchanges local information between pixels (and thus cross-windows), MOAT does not need the extra window-shifting mechanism. As a result, on COCO object detection, MOAT achieves 59.2% box AP with 227M model parameters (single-scale inference, and hard NMS), and on ADE20K semantic segmentation, MOAT attains 57.6% mIoU with 496M model parameters (single-scale inference). Finally, the tiny-MOAT family, obtained by simply reducing the channel sizes, also surprisingly outperforms several mobile-specific transformer-based models on ImageNet. We hope our simple yet effective MOAT will inspire more seamless integration of convolution and self-attention. Code is made publicly available.
k-means Mask Transformer
Jul 08, 2022
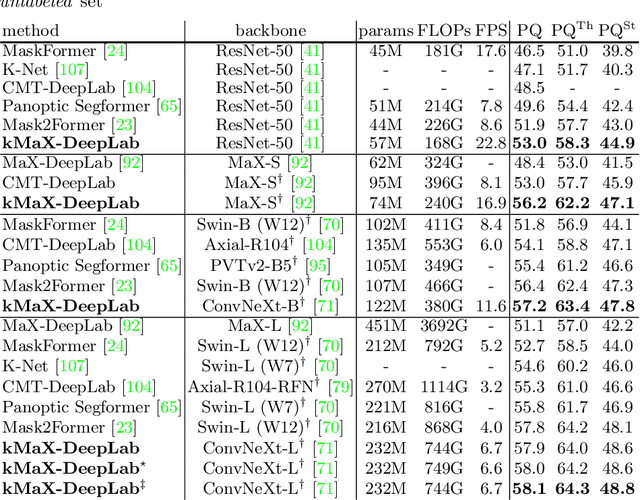
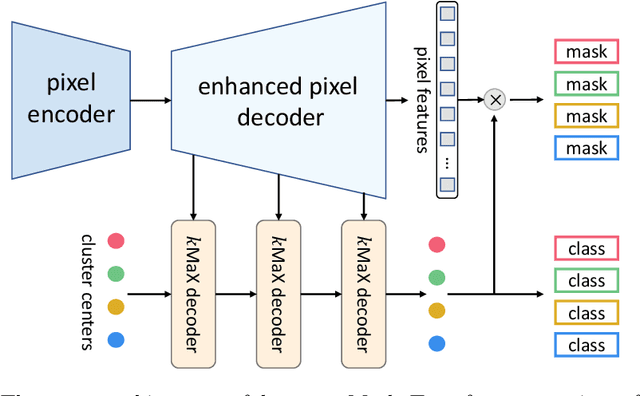
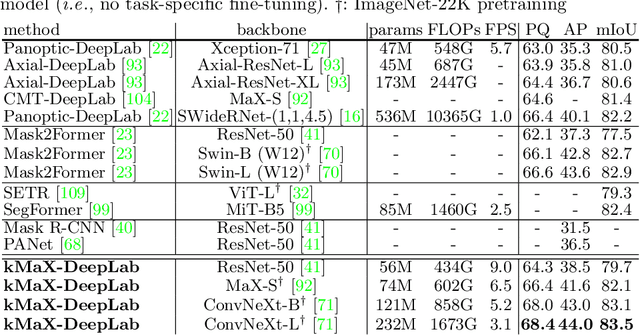
The rise of transformers in vision tasks not only advances network backbone designs, but also starts a brand-new page to achieve end-to-end image recognition (e.g., object detection and panoptic segmentation). Originated from Natural Language Processing (NLP), transformer architectures, consisting of self-attention and cross-attention, effectively learn long-range interactions between elements in a sequence. However, we observe that most existing transformer-based vision models simply borrow the idea from NLP, neglecting the crucial difference between languages and images, particularly the extremely large sequence length of spatially flattened pixel features. This subsequently impedes the learning in cross-attention between pixel features and object queries. In this paper, we rethink the relationship between pixels and object queries and propose to reformulate the cross-attention learning as a clustering process. Inspired by the traditional k-means clustering algorithm, we develop a k-means Mask Xformer (kMaX-DeepLab) for segmentation tasks, which not only improves the state-of-the-art, but also enjoys a simple and elegant design. As a result, our kMaX-DeepLab achieves a new state-of-the-art performance on COCO val set with 58.0% PQ, and Cityscapes val set with 68.4% PQ, 44.0% AP, and 83.5% mIoU without test-time augmentation or external dataset. We hope our work can shed some light on designing transformers tailored for vision tasks. Code and models are available at https://github.com/google-research/deeplab2
CMT-DeepLab: Clustering Mask Transformers for Panoptic Segmentation
Jun 17, 2022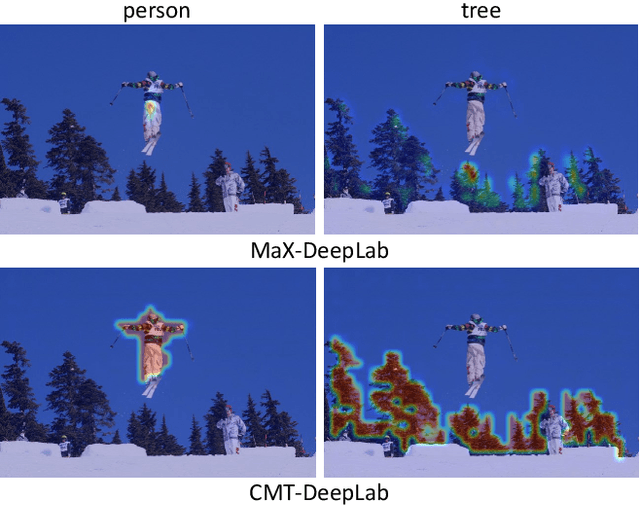
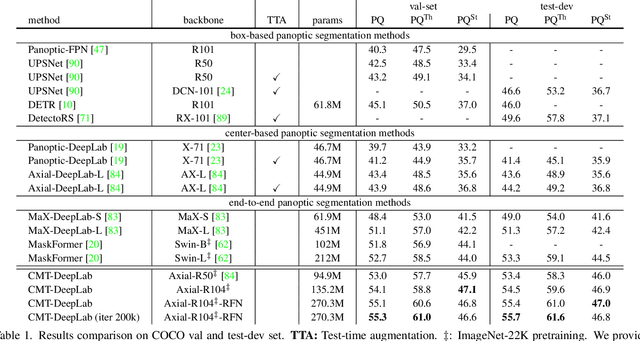
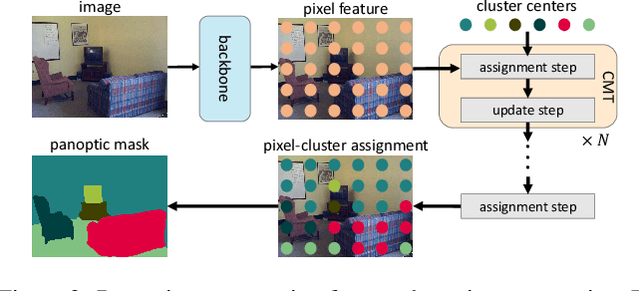

We propose Clustering Mask Transformer (CMT-DeepLab), a transformer-based framework for panoptic segmentation designed around clustering. It rethinks the existing transformer architectures used in segmentation and detection; CMT-DeepLab considers the object queries as cluster centers, which fill the role of grouping the pixels when applied to segmentation. The clustering is computed with an alternating procedure, by first assigning pixels to the clusters by their feature affinity, and then updating the cluster centers and pixel features. Together, these operations comprise the Clustering Mask Transformer (CMT) layer, which produces cross-attention that is denser and more consistent with the final segmentation task. CMT-DeepLab improves the performance over prior art significantly by 4.4% PQ, achieving a new state-of-the-art of 55.7% PQ on the COCO test-dev set.
Waymo Open Dataset: Panoramic Video Panoptic Segmentation
Jun 15, 2022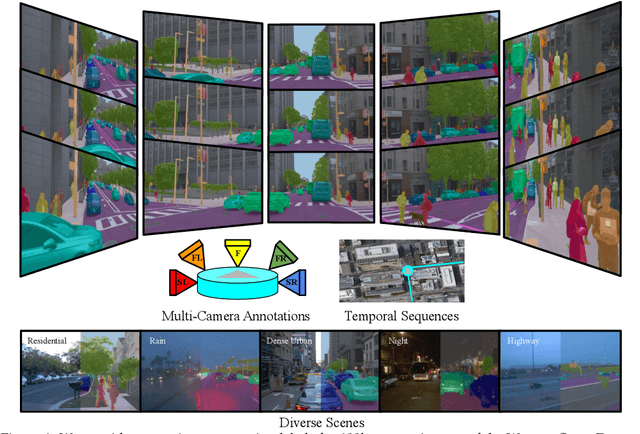
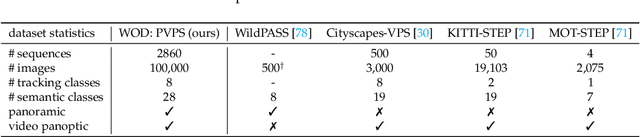
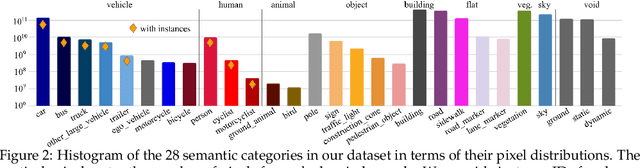
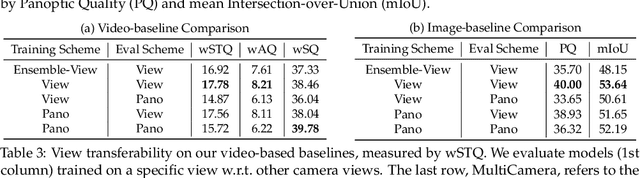
Panoptic image segmentation is the computer vision task of finding groups of pixels in an image and assigning semantic classes and object instance identifiers to them. Research in image segmentation has become increasingly popular due to its critical applications in robotics and autonomous driving. The research community thereby relies on publicly available benchmark dataset to advance the state-of-the-art in computer vision. Due to the high costs of densely labeling the images, however, there is a shortage of publicly available ground truth labels that are suitable for panoptic segmentation. The high labeling costs also make it challenging to extend existing datasets to the video domain and to multi-camera setups. We therefore present the Waymo Open Dataset: Panoramic Video Panoptic Segmentation Dataset, a large-scale dataset that offers high-quality panoptic segmentation labels for autonomous driving. We generate our dataset using the publicly available Waymo Open Dataset, leveraging the diverse set of camera images. Our labels are consistent over time for video processing and consistent across multiple cameras mounted on the vehicles for full panoramic scene understanding. Specifically, we offer labels for 28 semantic categories and 2,860 temporal sequences that were captured by five cameras mounted on autonomous vehicles driving in three different geographical locations, leading to a total of 100k labeled camera images. To the best of our knowledge, this makes our dataset an order of magnitude larger than existing datasets that offer video panoptic segmentation labels. We further propose a new benchmark for Panoramic Video Panoptic Segmentation and establish a number of strong baselines based on the DeepLab family of models. We will make the benchmark and the code publicly available. Find the dataset at https://waymo.com/open.
TubeFormer-DeepLab: Video Mask Transformer
May 30, 2022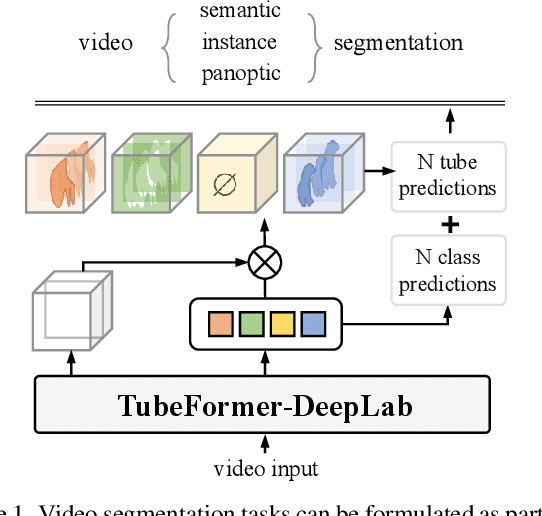
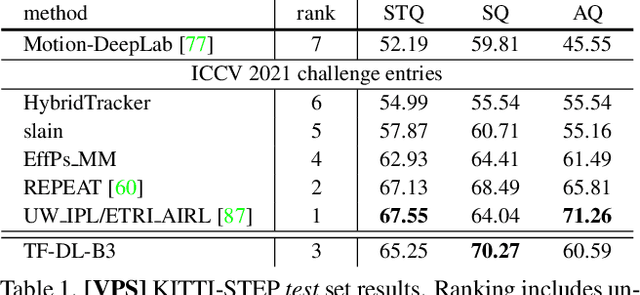
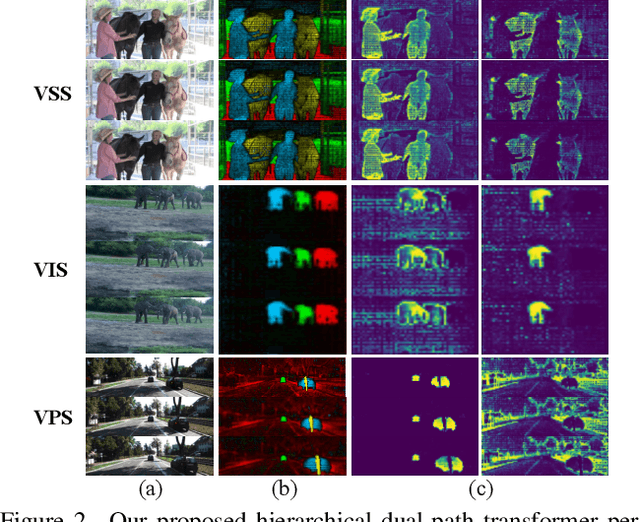
We present TubeFormer-DeepLab, the first attempt to tackle multiple core video segmentation tasks in a unified manner. Different video segmentation tasks (e.g., video semantic/instance/panoptic segmentation) are usually considered as distinct problems. State-of-the-art models adopted in the separate communities have diverged, and radically different approaches dominate in each task. By contrast, we make a crucial observation that video segmentation tasks could be generally formulated as the problem of assigning different predicted labels to video tubes (where a tube is obtained by linking segmentation masks along the time axis) and the labels may encode different values depending on the target task. The observation motivates us to develop TubeFormer-DeepLab, a simple and effective video mask transformer model that is widely applicable to multiple video segmentation tasks. TubeFormer-DeepLab directly predicts video tubes with task-specific labels (either pure semantic categories, or both semantic categories and instance identities), which not only significantly simplifies video segmentation models, but also advances state-of-the-art results on multiple video segmentation benchmarks