 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluating the Robustness of Proof Autoformalization in Lean 4
Jun 12, 2026Proof autoformalization aims to translate a mathematical informal proof written in natural language into a formal proof in a formal language such as Lean~4. Several works have developed LLM-based models for proof autoformalization. However, existing evaluations have typically focused on translating well-formed informal proofs from curated datasets. We argue that a robust proof autoformalizer must remain faithful even for informal proofs that diverge from these idealized ones, and we present the first study on the robustness of proof autoformalization models. We formulate two categories of perturbations and evaluate robustness under each: a global perturbation paraphrases the informal proof in a different style, under which the formalization should remain consistent; a local perturbation alters a value, symbol, or proof step, possibly in a counterfactual way, and a robust formalization should faithfully reflect the perturbation rather than reverting to the original one or inferring a different one on its own. We build a benchmark with both perturbations on miniF2F and MATH-500, and automatically measure how stable a proof autoformalization's correctness is under global perturbations and how faithfully its output reflects local perturbations. We evaluate seven recent models, all of which are sensitive to global perturbations and mostly fail to remain faithful under local perturbations. Code and data are available via https://github.com/ucr-rai/robust-proof-autoformalization.
Beyond Trajectory Rewards: Step-level Credit Assignment for Agentic Search via Graph Modeling
May 28, 2026In Agentic Search, trajectory-level outcome rewards fail to quantify the behavioral contributions of individual steps, while existing step-level reward methods typically rely on costly tree sampling. We view world knowledge as a latent world graph and each IS task as search within a latent task graph, where effective steps should make graph progress toward the answer node. Based on this prior, we propose Graph-Distance Contribution Reward (GDCR), a step-level process reward that scores newly-retrieved and newly-cited entities by their distance to the answer node in a training-time Entity-Relation (ER) graph. We further propose Step Advantage Policy Optimization (SAPO), which converts GDCR into step-level advantages and combines them with trajectory-level outcome advantages. Experiments on four challenging benchmarks validate the effectiveness of our method.
GSMap: 2D Gaussians for Online HD Mapping
May 10, 2026Accurate High-Definition (HD) map construction is critical for autonomous driving, yet existing methods face a fundamental trade-off: vectorization-based approaches preserve topology but struggle with geometric fidelity, while rasterization-based approaches enable precise geometric supervision but produce unstructured outputs. To bridge this gap, we propose GSMap, a novel framework that unifies both paradigms via a learnable 2D Gaussian representation. Each map element is modeled as an ordered sequence of 2D Gaussians, whose centers correspond to the vertices of the vectorized polyline/polygon. This formulation enables simultaneous optimization through: (1) Differentiable rasterization that enforces pixel-level geometric constraints, and (2) Topology-aware vectorization that maintains structural regularity. Experiments on both nuScenes and Argoverse2 demonstrate that our Gaussian-based representation effectively unifies geometric and topological learning, achieving significant performance improvements and demonstrating strong compatibility with existing HD mapping architectures. Code will be available at https://github.com/peakpang/GSMap
GLM-OCR Technical Report
Mar 11, 2026GLM-OCR is an efficient 0.9B-parameter compact multimodal model designed for real-world document understanding. It combines a 0.4B-parameter CogViT visual encoder with a 0.5B-parameter GLM language decoder, achieving a strong balance between computational efficiency and recognition performance. To address the inefficiency of standard autoregressive decoding in deterministic OCR tasks, GLM-OCR introduces a Multi-Token Prediction (MTP) mechanism that predicts multiple tokens per step, significantly improving decoding throughput while keeping memory overhead low through shared parameters. At the system level, a two-stage pipeline is adopted: PP-DocLayout-V3 first performs layout analysis, followed by parallel region-level recognition. Extensive evaluations on public benchmarks and industrial scenarios show that GLM-OCR achieves competitive or state-of-the-art performance in document parsing, text and formula transcription, table structure recovery, and key information extraction. Its compact architecture and structured generation make it suitable for both resource-constrained edge deployment and large-scale production systems.
LiDAR Prompted Spatio-Temporal Multi-View Stereo for Autonomous Driving
Mar 04, 2026Accurate metric depth is critical for autonomous driving perception and simulation, yet current approaches struggle to achieve high metric accuracy, multi-view and temporal consistency, and cross-domain generalization. To address these challenges, we present DriveMVS, a novel multi-view stereo framework that reconciles these competing objectives through two key insights: (1) Sparse but metrically accurate LiDAR observations can serve as geometric prompts to anchor depth estimation in absolute scale, and (2) deep fusion of diverse cues is essential for resolving ambiguities and enhancing robustness, while a spatio-temporal decoder ensures consistency across frames. Built upon these principles, DriveMVS embeds the LiDAR prompt in two ways: as a hard geometric prior that anchors the cost volume, and as soft feature-wise guidance fused by a triple-cue combiner. Regarding temporal consistency, DriveMVS employs a spatio-temporal decoder that jointly leverages geometric cues from the MVS cost volume and temporal context from neighboring frames. Experiments show that DriveMVS achieves state-of-the-art performance on multiple benchmarks, excelling in metric accuracy, temporal stability, and zero-shot cross-domain transfer, demonstrating its practical value for scalable, reliable autonomous driving systems.
TIGaussian: Disentangle Gaussians for Spatial-Awared Text-Image-3D Alignment
Jan 27, 2026While visual-language models have profoundly linked features between texts and images, the incorporation of 3D modality data, such as point clouds and 3D Gaussians, further enables pretraining for 3D-related tasks, e.g., cross-modal retrieval, zero-shot classification, and scene recognition. As challenges remain in extracting 3D modal features and bridging the gap between different modalities, we propose TIGaussian, a framework that harnesses 3D Gaussian Splatting (3DGS) characteristics to strengthen cross-modality alignment through multi-branch 3DGS tokenizer and modality-specific 3D feature alignment strategies. Specifically, our multi-branch 3DGS tokenizer decouples the intrinsic properties of 3DGS structures into compact latent representations, enabling more generalizable feature extraction. To further bridge the modality gap, we develop a bidirectional cross-modal alignment strategies: a multi-view feature fusion mechanism that leverages diffusion priors to resolve perspective ambiguity in image-3D alignment, while a text-3D projection module adaptively maps 3D features to text embedding space for better text-3D alignment. Extensive experiments on various datasets demonstrate the state-of-the-art performance of TIGaussian in multiple tasks.
GUIDE: Gaussian Unified Instance Detection for Enhanced Obstacle Perception in Autonomous Driving
Nov 17, 2025In the realm of autonomous driving, accurately detecting surrounding obstacles is crucial for effective decision-making. Traditional methods primarily rely on 3D bounding boxes to represent these obstacles, which often fail to capture the complexity of irregularly shaped, real-world objects. To overcome these limitations, we present GUIDE, a novel framework that utilizes 3D Gaussians for instance detection and occupancy prediction. Unlike conventional occupancy prediction methods, GUIDE also offers robust tracking capabilities. Our framework employs a sparse representation strategy, using Gaussian-to-Voxel Splatting to provide fine-grained, instance-level occupancy data without the computational demands associated with dense voxel grids. Experimental validation on the nuScenes dataset demonstrates GUIDE's performance, with an instance occupancy mAP of 21.61, marking a 50\% improvement over existing methods, alongside competitive tracking capabilities. GUIDE establishes a new benchmark in autonomous perception systems, effectively combining precision with computational efficiency to better address the complexities of real-world driving environments.
LiDAR-GS++:Improving LiDAR Gaussian Reconstruction via Diffusion Priors
Nov 15, 2025



Recent GS-based rendering has made significant progress for LiDAR, surpassing Neural Radiance Fields (NeRF) in both quality and speed. However, these methods exhibit artifacts in extrapolated novel view synthesis due to the incomplete reconstruction from single traversal scans. To address this limitation, we present LiDAR-GS++, a LiDAR Gaussian Splatting reconstruction method enhanced by diffusion priors for real-time and high-fidelity re-simulation on public urban roads. Specifically, we introduce a controllable LiDAR generation model conditioned on coarsely extrapolated rendering to produce extra geometry-consistent scans and employ an effective distillation mechanism for expansive reconstruction. By extending reconstruction to under-fitted regions, our approach ensures global geometric consistency for extrapolative novel views while preserving detailed scene surfaces captured by sensors. Experiments on multiple public datasets demonstrate that LiDAR-GS++ achieves state-of-the-art performance for both interpolated and extrapolated viewpoints, surpassing existing GS and NeRF-based methods.
ProFusion: 3D Reconstruction of Protein Complex Structures from Multi-view AFM Images
Sep 17, 2025



AI-based in silico methods have improved protein structure prediction but often struggle with large protein complexes (PCs) involving multiple interacting proteins due to missing 3D spatial cues. Experimental techniques like Cryo-EM are accurate but costly and time-consuming. We present ProFusion, a hybrid framework that integrates a deep learning model with Atomic Force Microscopy (AFM), which provides high-resolution height maps from random orientations, naturally yielding multi-view data for 3D reconstruction. However, generating a large-scale AFM imaging data set sufficient to train deep learning models is impractical. Therefore, we developed a virtual AFM framework that simulates the imaging process and generated a dataset of ~542,000 proteins with multi-view synthetic AFM images. We train a conditional diffusion model to synthesize novel views from unposed inputs and an instance-specific Neural Radiance Field (NeRF) model to reconstruct 3D structures. Our reconstructed 3D protein structures achieve an average Chamfer Distance within the AFM imaging resolution, reflecting high structural fidelity. Our method is extensively validated on experimental AFM images of various PCs, demonstrating strong potential for accurate, cost-effective protein complex structure prediction and rapid iterative validation using AFM experiments.
GLM-4.1V-Thinking: Towards Versatile Multimodal Reasoning with Scalable Reinforcement Learning
Jul 02, 2025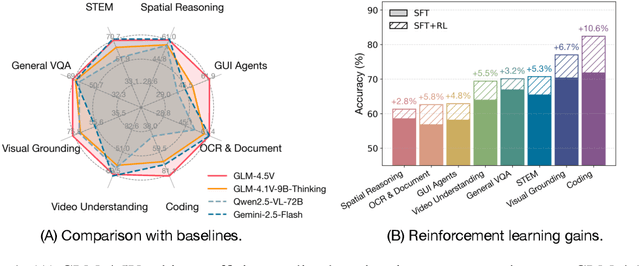
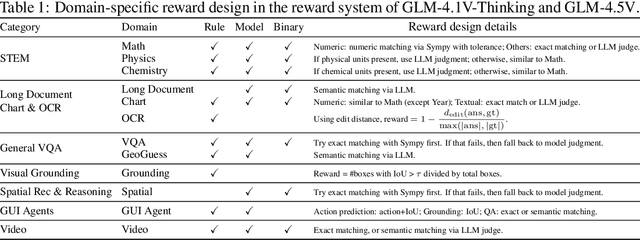
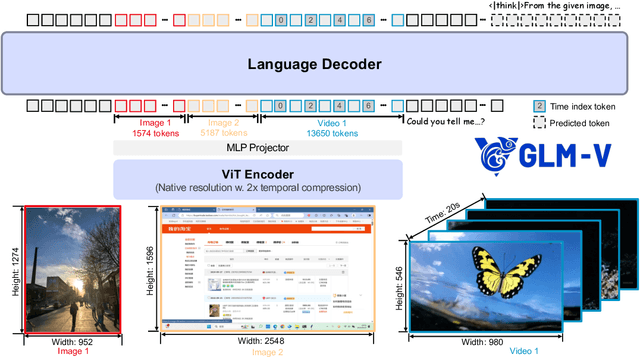

We present GLM-4.1V-Thinking, a vision-language model (VLM) designed to advance general-purpose multimodal understanding and reasoning. In this report, we share our key findings in the development of the reasoning-centric training framework. We first develop a capable vision foundation model with significant potential through large-scale pre-training, which arguably sets the upper bound for the final performance. We then propose Reinforcement Learning with Curriculum Sampling (RLCS) to unlock the full potential of the model, leading to comprehensive capability enhancement across a diverse range of tasks, including STEM problem solving, video understanding, content recognition, coding, grounding, GUI-based agents, and long document understanding. We open-source GLM-4.1V-9B-Thinking, which achieves state-of-the-art performance among models of comparable size. In a comprehensive evaluation across 28 public benchmarks, our model outperforms Qwen2.5-VL-7B on nearly all tasks and achieves comparable or even superior performance on 18 benchmarks relative to the significantly larger Qwen2.5-VL-72B. Notably, GLM-4.1V-9B-Thinking also demonstrates competitive or superior performance compared to closed-source models such as GPT-4o on challenging tasks including long document understanding and STEM reasoning, further underscoring its strong capabilities. Code, models and more information are released at https://github.com/THUDM/GLM-4.1V-Thinking.