 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePROF: An LLM-based Reward Code Preference Optimization Framework for Offline Imitation Learning
Nov 14, 2025



Offline imitation learning (offline IL) enables training effective policies without requiring explicit reward annotations. Recent approaches attempt to estimate rewards for unlabeled datasets using a small set of expert demonstrations. However, these methods often assume that the similarity between a trajectory and an expert demonstration is positively correlated with the reward, which oversimplifies the underlying reward structure. We propose PROF, a novel framework that leverages large language models (LLMs) to generate and improve executable reward function codes from natural language descriptions and a single expert trajectory. We propose Reward Preference Ranking (RPR), a novel reward function quality assessment and ranking strategy without requiring environment interactions or RL training. RPR calculates the dominance scores of the reward functions, where higher scores indicate better alignment with expert preferences. By alternating between RPR and text-based gradient optimization, PROF fully automates the selection and refinement of optimal reward functions for downstream policy learning. Empirical results on D4RL demonstrate that PROF surpasses or matches recent strong baselines across numerous datasets and domains, highlighting the effectiveness of our approach.
Attention as a Compass: Efficient Exploration for Process-Supervised RL in Reasoning Models
Sep 30, 2025Reinforcement Learning (RL) has shown remarkable success in enhancing the reasoning capabilities of Large Language Models (LLMs). Process-Supervised RL (PSRL) has emerged as a more effective paradigm compared to outcome-based RL. However, existing PSRL approaches suffer from limited exploration efficiency, both in terms of branching positions and sampling. In this paper, we introduce a novel PSRL framework (AttnRL), which enables efficient exploration for reasoning models. Motivated by preliminary observations that steps exhibiting high attention scores correlate with reasoning behaviors, we propose to branch from positions with high values. Furthermore, we develop an adaptive sampling strategy that accounts for problem difficulty and historical batch size, ensuring that the whole training batch maintains non-zero advantage values. To further improve sampling efficiency, we design a one-step off-policy training pipeline for PSRL. Extensive experiments on multiple challenging mathematical reasoning benchmarks demonstrate that our method consistently outperforms prior approaches in terms of performance and sampling and training efficiency.
A Survey of Reinforcement Learning for Large Reasoning Models
Sep 10, 2025In this paper, we survey recent advances in Reinforcement Learning (RL) for reasoning with Large Language Models (LLMs). RL has achieved remarkable success in advancing the frontier of LLM capabilities, particularly in addressing complex logical tasks such as mathematics and coding. As a result, RL has emerged as a foundational methodology for transforming LLMs into LRMs. With the rapid progress of the field, further scaling of RL for LRMs now faces foundational challenges not only in computational resources but also in algorithm design, training data, and infrastructure. To this end, it is timely to revisit the development of this domain, reassess its trajectory, and explore strategies to enhance the scalability of RL toward Artificial SuperIntelligence (ASI). In particular, we examine research applying RL to LLMs and LRMs for reasoning abilities, especially since the release of DeepSeek-R1, including foundational components, core problems, training resources, and downstream applications, to identify future opportunities and directions for this rapidly evolving area. We hope this review will promote future research on RL for broader reasoning models. Github: https://github.com/TsinghuaC3I/Awesome-RL-for-LRMs
ReviewRL: Towards Automated Scientific Review with RL
Aug 14, 2025Peer review is essential for scientific progress but faces growing challenges due to increasing submission volumes and reviewer fatigue. Existing automated review approaches struggle with factual accuracy, rating consistency, and analytical depth, often generating superficial or generic feedback lacking the insights characteristic of high-quality human reviews. We introduce ReviewRL, a reinforcement learning framework for generating comprehensive and factually grounded scientific paper reviews. Our approach combines: (1) an ArXiv-MCP retrieval-augmented context generation pipeline that incorporates relevant scientific literature, (2) supervised fine-tuning that establishes foundational reviewing capabilities, and (3) a reinforcement learning procedure with a composite reward function that jointly enhances review quality and rating accuracy. Experiments on ICLR 2025 papers demonstrate that ReviewRL significantly outperforms existing methods across both rule-based metrics and model-based quality assessments. ReviewRL establishes a foundational framework for RL-driven automatic critique generation in scientific discovery, demonstrating promising potential for future development in this domain. The implementation of ReviewRL will be released at GitHub.
GenPRM: Scaling Test-Time Compute of Process Reward Models via Generative Reasoning
Apr 01, 2025Recent advancements in Large Language Models (LLMs) have shown that it is promising to utilize Process Reward Models (PRMs) as verifiers to enhance the performance of LLMs. However, current PRMs face three key challenges: (1) limited process supervision and generalization capabilities, (2) dependence on scalar value prediction without leveraging the generative abilities of LLMs, and (3) inability to scale the test-time compute of PRMs. In this work, we introduce GenPRM, a generative process reward model that performs explicit Chain-of-Thought (CoT) reasoning with code verification before providing judgment for each reasoning step. To obtain high-quality process supervision labels and rationale data, we propose Relative Progress Estimation (RPE) and a rationale synthesis framework that incorporates code verification. Experimental results on ProcessBench and several mathematical reasoning tasks show that GenPRM significantly outperforms prior PRMs with only 23K training data from MATH dataset. Through test-time scaling, a 1.5B GenPRM outperforms GPT-4o, and a 7B GenPRM surpasses Qwen2.5-Math-PRM-72B on ProcessBench. Additionally, GenPRM demonstrates strong abilities to serve as a critic model for policy model refinement. This work establishes a new paradigm for process supervision that bridges the gap between PRMs and critic models in LLMs. Our code, model, and data will be available in https://ryanliu112.github.io/GenPRM.
VLP: Vision-Language Preference Learning for Embodied Manipulation
Feb 17, 2025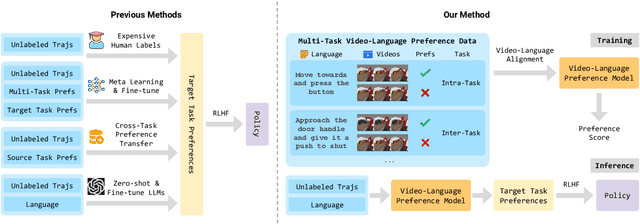
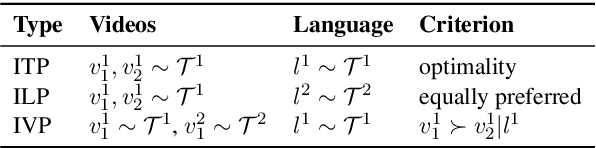
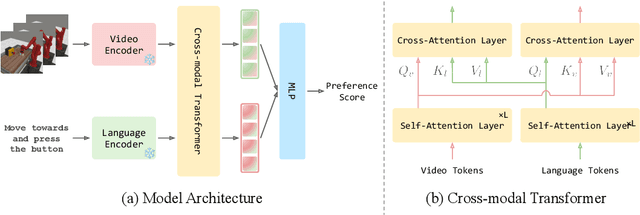
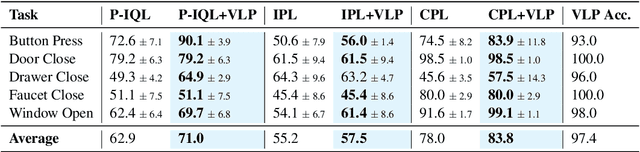
Reward engineering is one of the key challenges in Reinforcement Learning (RL). Preference-based RL effectively addresses this issue by learning from human feedback. However, it is both time-consuming and expensive to collect human preference labels. In this paper, we propose a novel \textbf{V}ision-\textbf{L}anguage \textbf{P}reference learning framework, named \textbf{VLP}, which learns a vision-language preference model to provide preference feedback for embodied manipulation tasks. To achieve this, we define three types of language-conditioned preferences and construct a vision-language preference dataset, which contains versatile implicit preference orders without human annotations. The preference model learns to extract language-related features, and then serves as a preference annotator in various downstream tasks. The policy can be learned according to the annotated preferences via reward learning or direct policy optimization. Extensive empirical results on simulated embodied manipulation tasks demonstrate that our method provides accurate preferences and generalizes to unseen tasks and unseen language instructions, outperforming the baselines by a large margin.
Can 1B LLM Surpass 405B LLM? Rethinking Compute-Optimal Test-Time Scaling
Feb 10, 2025Test-Time Scaling (TTS) is an important method for improving the performance of Large Language Models (LLMs) by using additional computation during the inference phase. However, current studies do not systematically analyze how policy models, Process Reward Models (PRMs), and problem difficulty influence TTS. This lack of analysis limits the understanding and practical use of TTS methods. In this paper, we focus on two core questions: (1) What is the optimal approach to scale test-time computation across different policy models, PRMs, and problem difficulty levels? (2) To what extent can extended computation improve the performance of LLMs on complex tasks, and can smaller language models outperform larger ones through this approach? Through comprehensive experiments on MATH-500 and challenging AIME24 tasks, we have the following observations: (1) The compute-optimal TTS strategy is highly dependent on the choice of policy model, PRM, and problem difficulty. (2) With our compute-optimal TTS strategy, extremely small policy models can outperform larger models. For example, a 1B LLM can exceed a 405B LLM on MATH-500. Moreover, on both MATH-500 and AIME24, a 0.5B LLM outperforms GPT-4o, a 3B LLM surpasses a 405B LLM, and a 7B LLM beats o1 and DeepSeek-R1, while with higher inference efficiency. These findings show the significance of adapting TTS strategies to the specific characteristics of each task and model and indicate that TTS is a promising approach for enhancing the reasoning abilities of LLMs.
Surface-Based Authentication System for Integrated Circuit Chips
Dec 19, 2024The rapid development of the semiconductor industry and the ubiquity of electronic devices have led to a significant increase in the counterfeiting of integrated circuits (ICs). This poses a major threat to public health, the banking industry, and military defense sectors that are heavily reliant on electronic systems. The electronic physically unclonable functions (PUFs) are widely used to authenticate IC chips at the unit level. However, electronic PUFs are limited by their requirement for IC chips to be in working status for measurements and their sensitivity to environmental variations. This paper proposes using optical PUFs for IC chip authentication by leveraging the unique microscopic structures of the packaging surface of individual IC chips. The proposed method relies on color images of IC chip surfaces acquired using a flatbed scanner or mobile camera. Our initial study reveals that these consumer-grade imaging devices can capture meaningful physical features from IC chip surfaces. We then propose an efficient, lightweight verification scheme leveraging specular-reflection-based features extracted from videos, achieving an equal error rate (EER) of 0.0008. We conducted factor, sensitivity, and ablation studies to understand the detailed characteristics of the proposed lightweight verification scheme. This work is the first to apply the optical PUF principle for the authentication of IC chips and has the potential to significantly enhance the security of the semiconductor supply chain.
RAT: Adversarial Attacks on Deep Reinforcement Agents for Targeted Behaviors
Dec 14, 2024Evaluating deep reinforcement learning (DRL) agents against targeted behavior attacks is critical for assessing their robustness. These attacks aim to manipulate the victim into specific behaviors that align with the attacker's objectives, often bypassing traditional reward-based defenses. Prior methods have primarily focused on reducing cumulative rewards; however, rewards are typically too generic to capture complex safety requirements effectively. As a result, focusing solely on reward reduction can lead to suboptimal attack strategies, particularly in safety-critical scenarios where more precise behavior manipulation is needed. To address these challenges, we propose RAT, a method designed for universal, targeted behavior attacks. RAT trains an intention policy that is explicitly aligned with human preferences, serving as a precise behavioral target for the adversary. Concurrently, an adversary manipulates the victim's policy to follow this target behavior. To enhance the effectiveness of these attacks, RAT dynamically adjusts the state occupancy measure within the replay buffer, allowing for more controlled and effective behavior manipulation. Our empirical results on robotic simulation tasks demonstrate that RAT outperforms existing adversarial attack algorithms in inducing specific behaviors. Additionally, RAT shows promise in improving agent robustness, leading to more resilient policies. We further validate RAT by guiding Decision Transformer agents to adopt behaviors aligned with human preferences in various MuJoCo tasks, demonstrating its effectiveness across diverse tasks.
A Large Language Model-Driven Reward Design Framework via Dynamic Feedback for Reinforcement Learning
Oct 18, 2024



Large Language Models (LLMs) have shown significant potential in designing reward functions for Reinforcement Learning (RL) tasks. However, obtaining high-quality reward code often involves human intervention, numerous LLM queries, or repetitive RL training. To address these issues, we propose CARD, a LLM-driven Reward Design framework that iteratively generates and improves reward function code. Specifically, CARD includes a Coder that generates and verifies the code, while a Evaluator provides dynamic feedback to guide the Coder in improving the code, eliminating the need for human feedback. In addition to process feedback and trajectory feedback, we introduce Trajectory Preference Evaluation (TPE), which evaluates the current reward function based on trajectory preferences. If the code fails the TPE, the Evaluator provides preference feedback, avoiding RL training at every iteration and making the reward function better aligned with the task objective. Empirical results on Meta-World and ManiSkill2 demonstrate that our method achieves an effective balance between task performance and token efficiency, outperforming or matching the baselines across all tasks. On 10 out of 12 tasks, CARD shows better or comparable performance to policies trained with expert-designed rewards, and our method even surpasses the oracle on 3 tasks.