 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMARINER: A 3E-Driven Benchmark for Fine-Grained Perception and Complex Reasoning in Open-Water Environments
Apr 09, 2026Fine-grained visual understanding and high-level reasoning in real-world open-water environments remain under-explored due to the lack of dedicated benchmarks. We introduce MARINER, a comprehensive benchmark built under the novel Entity-Environment-Event (3E) paradigm. MARINER contains 16,629 multi-source maritime images with 63 fine-grained vessel categories, diverse adverse environments, and 5 typical dynamic maritime incidents, covering fine-grained classification, object detection, and visual question answering tasks. We conduct extensive evaluations on mainstream Multimodal Large language models (MLLMs) and establish baselines, revealing that even advanced models struggle with fine-grained discrimination and causal reasoning in complex marine scenes. As a dedicated maritime benchmark, MARINER fills the gap of realistic and cognitive-level evaluation for maritime multimodal understanding, and promotes future research on robust vision-language models for open-water applications. Appendix and supplementary materials are available at https://lxixim.github.io/MARINER.
Breaking the Prototype Bias Loop: Confidence-Aware Federated Contrastive Learning for Highly Imbalanced Clients
Mar 03, 2026Local class imbalance and data heterogeneity across clients often trap prototype-based federated contrastive learning in a prototype bias loop: biased local prototypes induced by imbalanced data are aggregated into biased global prototypes, which are repeatedly reused as contrastive anchors, accumulating errors across communication rounds. To break this loop, we propose Confidence-Aware Federated Contrastive Learning (CAFedCL), a novel framework that improves the prototype aggregation mechanism and strengthens the contrastive alignment guided by prototypes. CAFedCL employs a confidence-aware aggregation mechanism that leverages predictive uncertainty to downweight high-variance local prototypes. In addition, generative augmentation for minority classes and geometric consistency regularization are integrated to stabilize the structure between classes. From a theoretical perspective, we provide an expectation-based analysis showing that our aggregation reduces estimation variance, thereby bounding global prototype drift and ensuring convergence. Extensive experiments under varying levels of class imbalance and data heterogeneity demonstrate that CAFedCL consistently outperforms representative federated baselines in both accuracy and client fairness.
AoE: Always-on Egocentric Human Video Collection for Embodied AI
Mar 02, 2026Embodied foundation models require large-scale, high-quality real-world interaction data for pre-training and scaling. However, existing data collection methods suffer from high infrastructure costs, complex hardware dependencies, and limited interaction scope, making scalable expansion challenging. In fact, humans themselves are ideal physically embodied agents. Therefore, obtaining egocentric real-world interaction data from globally distributed "human agents" offers advantages of low cost and sustainability. To this end, we propose the Always-on Egocentric (AoE) data collection system, which aims to simplify hardware dependencies by leveraging humans themselves and their smartphones, enabling low-cost, highly efficient, and scene-agnostic real-world interaction data collection to address the challenge of data scarcity. Specifically, we first employ an ergonomic neck-mounted smartphone holder to enable low-barrier, large-scale egocentric data collection through a cloud-edge collaborative architecture. Second, we develop a cross-platform mobile APP that leverages on-device compute for real-time processing, while the cloud hosts automated labeling and filtering pipelines that transform raw videos into high-quality training data. Finally, the AoE system supports distributed Ego video data collection by anyone, anytime, and anywhere. We evaluate AoE on data preprocessing quality and downstream tasks, demonstrating that high-quality egocentric data significantly boosts real-world generalization.
Enhance and Reuse: A Dual-Mechanism Approach to Boost Deep Forest for Label Distribution Learning
Feb 06, 2026Label distribution learning (LDL) requires the learner to predict the degree of correlation between each sample and each label. To achieve this, a crucial task during learning is to leverage the correlation among labels. Deep Forest (DF) is a deep learning framework based on tree ensembles, whose training phase does not rely on backpropagation. DF performs in-model feature transform using the prediction of each layer and achieves competitive performance on many tasks. However, its exploration in the field of LDL is still in its infancy. The few existing methods that apply DF to the field of LDL do not have effective ways to utilize the correlation among labels. Therefore, we propose a method named Enhanced and Reused Feature Deep Forest (ERDF). It mainly contains two mechanisms: feature enhancement exploiting label correlation and measure-aware feature reuse. The first one is to utilize the correlation among labels to enhance the original features, enabling the samples to acquire more comprehensive information for the task of LDL. The second one performs a reuse operation on the features of samples that perform worse than the previous layer on the validation set, in order to ensure the stability of the training process. This kind of Enhance-Reuse pattern not only enables samples to enrich their features but also validates the effectiveness of their new features and conducts a reuse process to prevent the noise from spreading further. Experiments show that our method outperforms other comparison algorithms on six evaluation metrics.
FGTBT: Frequency-Guided Task-Balancing Transformer for Unified Facial Landmark Detection
Jan 19, 2026Recently, deep learning based facial landmark detection (FLD) methods have achieved considerable success. However, in challenging scenarios such as large pose variations, illumination changes, and facial expression variations, they still struggle to accurately capture the geometric structure of the face, resulting in performance degradation. Moreover, the limited size and diversity of existing FLD datasets hinder robust model training, leading to reduced detection accuracy. To address these challenges, we propose a Frequency-Guided Task-Balancing Transformer (FGTBT), which enhances facial structure perception through frequency-domain modeling and multi-dataset unified training. Specifically, we propose a novel Fine-Grained Multi-Task Balancing loss (FMB-loss), which moves beyond coarse task-level balancing by assigning weights to individual landmarks based on their occurrence across datasets. This enables more effective unified training and mitigates the issue of inconsistent gradient magnitudes. Additionally, a Frequency-Guided Structure-Aware (FGSA) model is designed to utilize frequency-guided structure injection and regularization to help learn facial structure constraints. Extensive experimental results on popular benchmark datasets demonstrate that the integration of the proposed FMB-loss and FGSA model into our FGTBT framework achieves performance comparable to state-of-the-art methods. The code is available at https://github.com/Xi0ngxinyu/FGTBT.
RoboOS-NeXT: A Unified Memory-based Framework for Lifelong, Scalable, and Robust Multi-Robot Collaboration
Oct 30, 2025The proliferation of collaborative robots across diverse tasks and embodiments presents a central challenge: achieving lifelong adaptability, scalable coordination, and robust scheduling in multi-agent systems. Existing approaches, from vision-language-action (VLA) models to hierarchical frameworks, fall short due to their reliance on limited or dividual-agent memory. This fundamentally constrains their ability to learn over long horizons, scale to heterogeneous teams, or recover from failures, highlighting the need for a unified memory representation. To address these limitations, we introduce RoboOS-NeXT, a unified memory-based framework for lifelong, scalable, and robust multi-robot collaboration. At the core of RoboOS-NeXT is the novel Spatio-Temporal-Embodiment Memory (STEM), which integrates spatial scene geometry, temporal event history, and embodiment profiles into a shared representation. This memory-centric design is integrated into a brain-cerebellum framework, where a high-level brain model performs global planning by retrieving and updating STEM, while low-level controllers execute actions locally. This closed loop between cognition, memory, and execution enables dynamic task allocation, fault-tolerant collaboration, and consistent state synchronization. We conduct extensive experiments spanning complex coordination tasks in restaurants, supermarkets, and households. Our results demonstrate that RoboOS-NeXT achieves superior performance across heterogeneous embodiments, validating its effectiveness in enabling lifelong, scalable, and robust multi-robot collaboration. Project website: https://flagopen.github.io/RoboOS/
Survey of Multimodal Geospatial Foundation Models: Techniques, Applications, and Challenges
Oct 27, 2025Foundation models have transformed natural language processing and computer vision, and their impact is now reshaping remote sensing image analysis. With powerful generalization and transfer learning capabilities, they align naturally with the multimodal, multi-resolution, and multi-temporal characteristics of remote sensing data. To address unique challenges in the field, multimodal geospatial foundation models (GFMs) have emerged as a dedicated research frontier. This survey delivers a comprehensive review of multimodal GFMs from a modality-driven perspective, covering five core visual and vision-language modalities. We examine how differences in imaging physics and data representation shape interaction design, and we analyze key techniques for alignment, integration, and knowledge transfer to tackle modality heterogeneity, distribution shifts, and semantic gaps. Advances in training paradigms, architectures, and task-specific adaptation strategies are systematically assessed alongside a wealth of emerging benchmarks. Representative multimodal visual and vision-language GFMs are evaluated across ten downstream tasks, with insights into their architectures, performance, and application scenarios. Real-world case studies, spanning land cover mapping, agricultural monitoring, disaster response, climate studies, and geospatial intelligence, demonstrate the practical potential of GFMs. Finally, we outline pressing challenges in domain generalization, interpretability, efficiency, and privacy, and chart promising avenues for future research.
Beyond Distribution Shifts: Adaptive Hyperspectral Image Classification at Test Time
Sep 10, 2025Hyperspectral image (HSI) classification models are highly sensitive to distribution shifts caused by various real-world degradations such as noise, blur, compression, and atmospheric effects. To address this challenge, we propose HyperTTA, a unified framework designed to enhance model robustness under diverse degradation conditions. Specifically, we first construct a multi-degradation hyperspectral dataset that systematically simulates nine representative types of degradations, providing a comprehensive benchmark for robust classification evaluation. Based on this, we design a spectral-spatial transformer classifier (SSTC) enhanced with a multi-level receptive field mechanism and label smoothing regularization to jointly capture multi-scale spatial context and improve generalization. Furthermore, HyperTTA incorporates a lightweight test-time adaptation (TTA) strategy, the confidence-aware entropy-minimized LayerNorm adapter (CELA), which updates only the affine parameters of LayerNorm layers by minimizing prediction entropy on high-confidence unlabeled target samples. This confidence-aware adaptation prevents unreliable updates from noisy predictions, enabling robust and dynamic adaptation without access to source data or target annotations. Extensive experiments on two benchmark datasets demonstrate that HyperTTA outperforms existing baselines across a wide range of degradation scenarios, validating the effectiveness of both its classification backbone and the proposed TTA scheme. Code will be made available publicly.
SpikePingpong: High-Frequency Spike Vision-based Robot Learning for Precise Striking in Table Tennis Game
Jun 07, 2025

Learning to control high-speed objects in the real world remains a challenging frontier in robotics. Table tennis serves as an ideal testbed for this problem, demanding both rapid interception of fast-moving balls and precise adjustment of their trajectories. This task presents two fundamental challenges: it requires a high-precision vision system capable of accurately predicting ball trajectories, and it necessitates intelligent strategic planning to ensure precise ball placement to target regions. The dynamic nature of table tennis, coupled with its real-time response requirements, makes it particularly well-suited for advancing robotic control capabilities in fast-paced, precision-critical domains. In this paper, we present SpikePingpong, a novel system that integrates spike-based vision with imitation learning for high-precision robotic table tennis. Our approach introduces two key attempts that directly address the aforementioned challenges: SONIC, a spike camera-based module that achieves millimeter-level precision in ball-racket contact prediction by compensating for real-world uncertainties such as air resistance and friction; and IMPACT, a strategic planning module that enables accurate ball placement to targeted table regions. The system harnesses a 20 kHz spike camera for high-temporal resolution ball tracking, combined with efficient neural network models for real-time trajectory correction and stroke planning. Experimental results demonstrate that SpikePingpong achieves a remarkable 91% success rate for 30 cm accuracy target area and 71% in the more challenging 20 cm accuracy task, surpassing previous state-of-the-art approaches by 38% and 37% respectively. These significant performance improvements enable the robust implementation of sophisticated tactical gameplay strategies, providing a new research perspective for robotic control in high-speed dynamic tasks.
Improving Ad matching via Cluster-Adaptive Keyword Expansion and Relevance tuning
May 24, 2025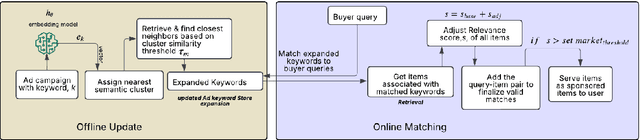

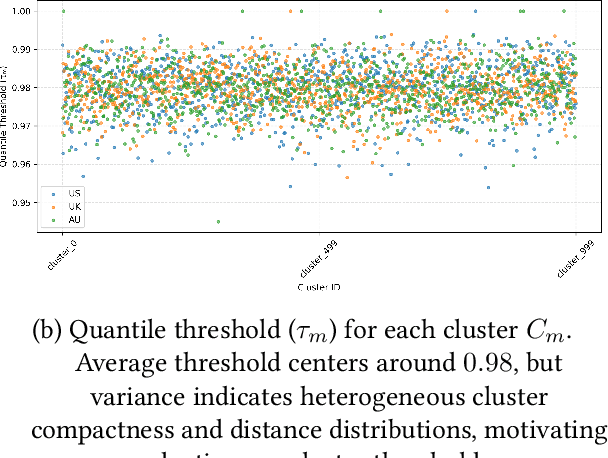
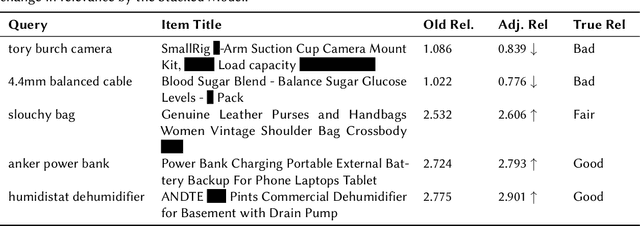
In search advertising, keyword matching connects user queries with relevant ads. While token-based matching increases ad coverage, it can reduce relevance due to overly permissive semantic expansion. This work extends keyword reach through document-side semantic keyword expansion, using a language model to broaden token-level matching without altering queries. We propose a solution using a pre-trained siamese model to generate dense vector representations of ad keywords and identify semantically related variants through nearest neighbor search. To maintain precision, we introduce a cluster-based thresholding mechanism that adjusts similarity cutoffs based on local semantic density. Each expanded keyword maps to a group of seller-listed items, which may only partially align with the original intent. To ensure relevance, we enhance the downstream relevance model by adapting it to the expanded keyword space using an incremental learning strategy with a lightweight decision tree ensemble. This system improves both relevance and click-through rate (CTR), offering a scalable, low-latency solution adaptable to evolving query behavior and advertising inventory.