 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUMI-Bench 1.0: An Open and Reproducible Real-World Benchmark for Tabletop Robotic Manipulation with UMI Data
Jun 09, 2026Real-robot evaluation is essential for understanding whether learned manipulation policies can operate reliably outside curated demonstrations. This need is particularly pressing for Universal Manipulation Interface (UMI)-style policies, whose performance depends on the coupling between wrist-view observations, action representation, data collection, and physical deployment. Existing real-world benchmarks have made important progress, but they are not designed around this UMI data-to-deployment setting. We present UMI-Bench 1.0, a local-first real-robot benchmark for standardized evaluation of UMI-style manipulation policies. To the best of our knowledge, this is the first benchmark dedicated to real-world evaluation of UMI-based manipulation models. UMI-Bench aligns data collection, scene reset, policy execution, result logging, and task-factor analysis within a unified protocol. By making the full evaluation process reproducible and auditable, UMI-Bench provides a practical testbed for measuring how UMI-trained policies generalize to real physical manipulation.
FastUMI-100K: Advancing Data-driven Robotic Manipulation with a Large-scale UMI-style Dataset
Oct 09, 2025Data-driven robotic manipulation learning depends on large-scale, high-quality expert demonstration datasets. However, existing datasets, which primarily rely on human teleoperated robot collection, are limited in terms of scalability, trajectory smoothness, and applicability across different robotic embodiments in real-world environments. In this paper, we present FastUMI-100K, a large-scale UMI-style multimodal demonstration dataset, designed to overcome these limitations and meet the growing complexity of real-world manipulation tasks. Collected by FastUMI, a novel robotic system featuring a modular, hardware-decoupled mechanical design and an integrated lightweight tracking system, FastUMI-100K offers a more scalable, flexible, and adaptable solution to fulfill the diverse requirements of real-world robot demonstration data. Specifically, FastUMI-100K contains over 100K+ demonstration trajectories collected across representative household environments, covering 54 tasks and hundreds of object types. Our dataset integrates multimodal streams, including end-effector states, multi-view wrist-mounted fisheye images and textual annotations. Each trajectory has a length ranging from 120 to 500 frames. Experimental results demonstrate that FastUMI-100K enables high policy success rates across various baseline algorithms, confirming its robustness, adaptability, and real-world applicability for solving complex, dynamic manipulation challenges. The source code and dataset will be released in this link https://github.com/MrKeee/FastUMI-100K.
BestMan: A Modular Mobile Manipulator Platform for Embodied AI with Unified Simulation-Hardware APIs
Oct 17, 2024
Embodied Artificial Intelligence (Embodied AI) emphasizes agents' ability to perceive, understand, and act in physical environments. Simulation platforms play a crucial role in advancing this field by enabling the validation and optimization of algorithms. However, existing platforms face challenges such as multilevel technical integration complexity, insufficient modularity, interface heterogeneity, and adaptation to diverse hardware. We present BestMan, a simulation platform based on PyBullet, designed to address these issues. BestMan introduces an integrated multilevel skill chain for seamless coordination across perception, planning, and control; a highly modular architecture for flexible algorithm integration; unified interfaces for smooth simulation-to-reality transfer; and a hardware-agnostic approach for adapting to various mobile manipulator configurations. These features collectively simplify development and enhance platform expandability, making BestMan a valuable tool for Embodied AI research.
Fast-UMI: A Scalable and Hardware-Independent Universal Manipulation Interface
Sep 29, 2024



Collecting real-world manipulation trajectory data involving robotic arms is essential for developing general-purpose action policies in robotic manipulation, yet such data remains scarce. Existing methods face limitations such as high costs, labor intensity, hardware dependencies, and complex setup requirements involving SLAM algorithms. In this work, we introduce Fast-UMI, an interface-mediated manipulation system comprising two key components: a handheld device operated by humans for data collection and a robot-mounted device used during policy inference. Our approach employs a decoupled design compatible with a wide range of grippers while maintaining consistent observation perspectives, allowing models trained on handheld-collected data to be directly applied to real robots. By directly obtaining the end-effector pose using existing commercial hardware products, we eliminate the need for complex SLAM deployment and calibration, streamlining data processing. Fast-UMI provides supporting software tools for efficient robot learning data collection and conversion, facilitating rapid, plug-and-play functionality. This system offers an efficient and user-friendly tool for robotic learning data acquisition.
AlignBot: Aligning VLM-powered Customized Task Planning with User Reminders Through Fine-Tuning for Household Robots
Sep 18, 2024



This paper presents AlignBot, a novel framework designed to optimize VLM-powered customized task planning for household robots by effectively aligning with user reminders. In domestic settings, aligning task planning with user reminders poses significant challenges due to the limited quantity, diversity, and multimodal nature of the reminders. To address these challenges, AlignBot employs a fine-tuned LLaVA-7B model, functioning as an adapter for GPT-4o. This adapter model internalizes diverse forms of user reminders-such as personalized preferences, corrective guidance, and contextual assistance-into structured instruction-formatted cues that prompt GPT-4o in generating customized task plans. Additionally, AlignBot integrates a dynamic retrieval mechanism that selects task-relevant historical successes as prompts for GPT-4o, further enhancing task planning accuracy. To validate the effectiveness of AlignBot, experiments are conducted in real-world household environments, which are constructed within the laboratory to replicate typical household settings. A multimodal dataset with over 1,500 entries derived from volunteer reminders is used for training and evaluation. The results demonstrate that AlignBot significantly improves customized task planning, outperforming existing LLM- and VLM-powered planners by interpreting and aligning with user reminders, achieving 86.8% success rate compared to the vanilla GPT-4o baseline at 21.6%, reflecting a 65% improvement and over four times greater effectiveness. Supplementary materials are available at: https://yding25.com/AlignBot/
Integrating Action Knowledge and LLMs for Task Planning and Situation Handling in Open Worlds
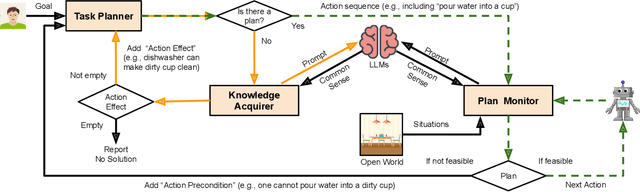
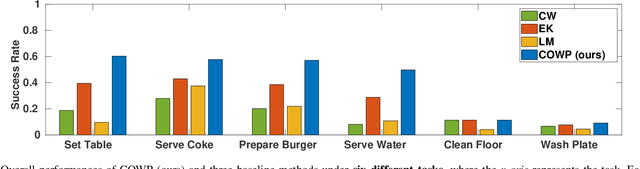
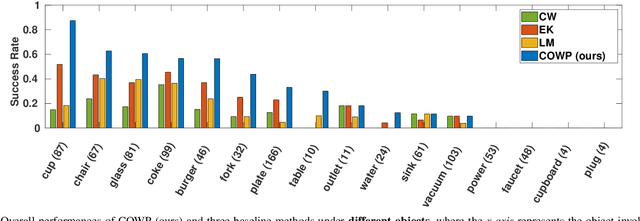
May 27, 2023Task planning systems have been developed to help robots use human knowledge (about actions) to complete long-horizon tasks. Most of them have been developed for "closed worlds" while assuming the robot is provided with complete world knowledge. However, the real world is generally open, and the robots frequently encounter unforeseen situations that can potentially break the planner's completeness. Could we leverage the recent advances on pre-trained Large Language Models (LLMs) to enable classical planning systems to deal with novel situations? This paper introduces a novel framework, called COWP, for open-world task planning and situation handling. COWP dynamically augments the robot's action knowledge, including the preconditions and effects of actions, with task-oriented commonsense knowledge. COWP embraces the openness from LLMs, and is grounded to specific domains via action knowledge. For systematic evaluations, we collected a dataset that includes 1,085 execution-time situations. Each situation corresponds to a state instance wherein a robot is potentially unable to complete a task using a solution that normally works. Experimental results show that our approach outperforms competitive baselines from the literature in the success rate of service tasks. Additionally, we have demonstrated COWP using a mobile manipulator. Supplementary materials are available at: https://cowplanning.github.io/
Robot Task Planning and Situation Handling in Open Worlds
Oct 04, 2022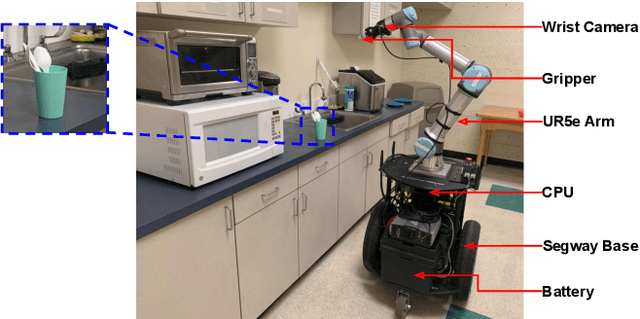
Automated task planning algorithms have been developed to help robots complete complex tasks that require multiple actions. Most of those algorithms have been developed for "closed worlds" assuming complete world knowledge is provided. However, the real world is generally open, and the robots frequently encounter unforeseen situations that can potentially break the planner's completeness. This paper introduces a novel algorithm (COWP) for open-world task planning and situation handling that dynamically augments the robot's action knowledge with task-oriented common sense. In particular, common sense is extracted from Large Language Models based on the current task at hand and robot skills. For systematic evaluations, we collected a dataset that includes 561 execution-time situations in a dining domain, where each situation corresponds to a state instance of a robot being potentially unable to complete a task using a solution that normally works. Experimental results show that our approach significantly outperforms competitive baselines from the literature in the success rate of service tasks. Additionally, we have demonstrated COWP using a mobile manipulator. Supplementary materials are available at: https://cowplanning.github.io/