 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIterCAD: An Iterative Multimodal Agent for Visually-Grounded CAD Generation and Editing
Jun 11, 2026Computer-Aided Design is pivotal in modern manufacturing, yet existing automated methods predominantly rely on open-loop, one-shot generation, creating a mismatch with iterative real-world practices. In this paper, we present IterCAD, a unified multimodal agent framework for closed-loop, interactive CAD generation and editing. We formulate the task as a multi-turn interaction between a multimodal agent and an executable CAD sandbox, covering three tasks: Drawing-to-Code, Text-to-Code, and Interactive Editing. To support this, we develop a data synthesis pipeline incorporating advanced industrial manufacturing features to generate standard-compliant multi-view engineering drawings, complex code-editing tasks, and high-fidelity interaction trajectories. We optimize the agent via progressive SFT followed by geometry-aware reinforcement learning with viable-prefix masking to enhance code executability and geometric fidelity. Finally, we introduce the IterCAD-Bench evaluation suite and propose the Chamfer Distance Tolerance-Recall (CD-TR) curve alongside its AUC-TR metric, establishing a survivor-bias-free standard that unifies code validity and geometric precision. Extensive experiments demonstrate that IterCAD achieves highly competitive performance across multiple benchmarks, significantly outperforming existing approaches in both code executability and geometric precision, while exhibiting superior capabilities in closed-loop iterative refinement.
ComAct: Reframing Professional Software Manipulation via COM-as-Action Paradigm
Jun 11, 2026Existing computer-use agents remain fundamentally limited in professional software manipulation: GUI-based agents suffer from fragile visual grounding and long-horizon error accumulation, while API-basedapproaches struggle with heterogeneous protocols and inaccessible commercial interfaces. In this work,we identify the Component Object Model (COM) as a unified executable abstraction, proposing COM-as-Action: a new paradigm that reframes professional software interaction as deterministic program synthesisrather than sequential visual control. To validate this paradigm in the most demanding environments, weintroduce ComCADBench, the first benchmark for agents operating real industrial CAD software. Ourexperiments reveal a substantial paradigm gap: frontier proprietary models achieve near-zero successunder GUI-based interaction, whereas COM-based execution yields substantial immediate gains. Tobridge the remaining gap between syntactic correctness and geometric accuracy, we develop ComActor, aself-correcting agent trained through a progressive three-stage framework, alongside ComForge, a scalableplatform for large-scale training in Windows containers. Extensive experiments show that ComActorachieves state-of-the-art performance on ComCADBench, with strong resilience in long-horizon taskswhere baselines collapse, and generalizes to external CAD benchmark.
Learning on the Job: An Experience-Driven Self-Evolving Agent for Long-Horizon Tasks
Oct 09, 2025Large Language Models have demonstrated remarkable capabilities across diverse domains, yet significant challenges persist when deploying them as AI agents for real-world long-horizon tasks. Existing LLM agents suffer from a critical limitation: they are test-time static and cannot learn from experience, lacking the ability to accumulate knowledge and continuously improve on the job. To address this challenge, we propose MUSE, a novel agent framework that introduces an experience-driven, self-evolving system centered around a hierarchical Memory Module. MUSE organizes diverse levels of experience and leverages them to plan and execute long-horizon tasks across multiple applications. After each sub-task execution, the agent autonomously reflects on its trajectory, converting the raw trajectory into structured experience and integrating it back into the Memory Module. This mechanism enables the agent to evolve beyond its static pretrained parameters, fostering continuous learning and self-evolution. We evaluate MUSE on the long-horizon productivity benchmark TAC. It achieves new SOTA performance by a significant margin using only a lightweight Gemini-2.5 Flash model. Sufficient Experiments demonstrate that as the agent autonomously accumulates experience, it exhibits increasingly superior task completion capabilities, as well as robust continuous learning and self-evolution capabilities. Moreover, the accumulated experience from MUSE exhibits strong generalization properties, enabling zero-shot improvement on new tasks. MUSE establishes a new paradigm for AI agents capable of real-world productivity task automation.
InternVL3.5: Advancing Open-Source Multimodal Models in Versatility, Reasoning, and Efficiency
Aug 25, 2025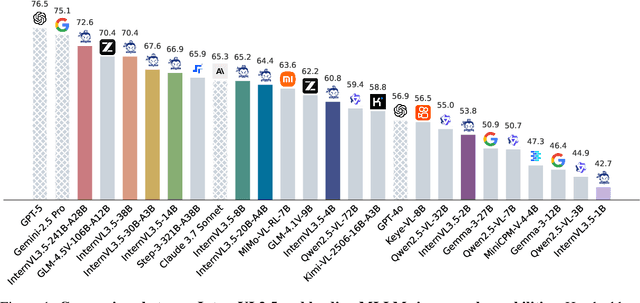
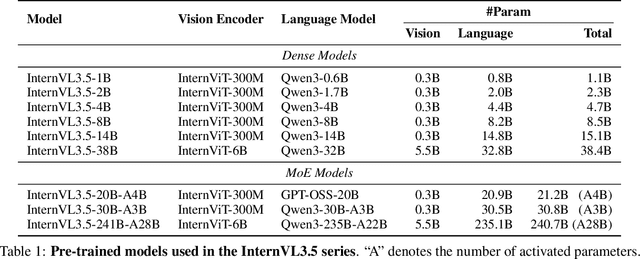
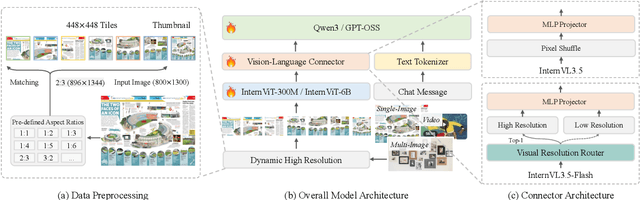
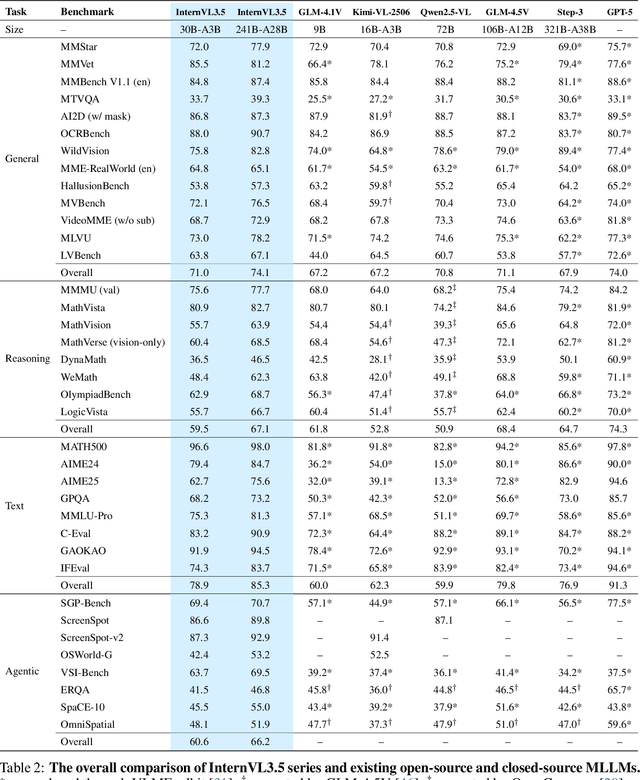
We introduce InternVL 3.5, a new family of open-source multimodal models that significantly advances versatility, reasoning capability, and inference efficiency along the InternVL series. A key innovation is the Cascade Reinforcement Learning (Cascade RL) framework, which enhances reasoning through a two-stage process: offline RL for stable convergence and online RL for refined alignment. This coarse-to-fine training strategy leads to substantial improvements on downstream reasoning tasks, e.g., MMMU and MathVista. To optimize efficiency, we propose a Visual Resolution Router (ViR) that dynamically adjusts the resolution of visual tokens without compromising performance. Coupled with ViR, our Decoupled Vision-Language Deployment (DvD) strategy separates the vision encoder and language model across different GPUs, effectively balancing computational load. These contributions collectively enable InternVL3.5 to achieve up to a +16.0\% gain in overall reasoning performance and a 4.05$\times$ inference speedup compared to its predecessor, i.e., InternVL3. In addition, InternVL3.5 supports novel capabilities such as GUI interaction and embodied agency. Notably, our largest model, i.e., InternVL3.5-241B-A28B, attains state-of-the-art results among open-source MLLMs across general multimodal, reasoning, text, and agentic tasks -- narrowing the performance gap with leading commercial models like GPT-5. All models and code are publicly released.
Is Sora a World Simulator? A Comprehensive Survey on General World Models and Beyond
May 06, 2024General world models represent a crucial pathway toward achieving Artificial General Intelligence (AGI), serving as the cornerstone for various applications ranging from virtual environments to decision-making systems. Recently, the emergence of the Sora model has attained significant attention due to its remarkable simulation capabilities, which exhibits an incipient comprehension of physical laws. In this survey, we embark on a comprehensive exploration of the latest advancements in world models. Our analysis navigates through the forefront of generative methodologies in video generation, where world models stand as pivotal constructs facilitating the synthesis of highly realistic visual content. Additionally, we scrutinize the burgeoning field of autonomous-driving world models, meticulously delineating their indispensable role in reshaping transportation and urban mobility. Furthermore, we delve into the intricacies inherent in world models deployed within autonomous agents, shedding light on their profound significance in enabling intelligent interactions within dynamic environmental contexts. At last, we examine challenges and limitations of world models, and discuss their potential future directions. We hope this survey can serve as a foundational reference for the research community and inspire continued innovation. This survey will be regularly updated at: https://github.com/GigaAI-research/General-World-Models-Survey.
OASim: an Open and Adaptive Simulator based on Neural Rendering for Autonomous Driving
Feb 06, 2024With deep learning and computer vision technology development, autonomous driving provides new solutions to improve traffic safety and efficiency. The importance of building high-quality datasets is self-evident, especially with the rise of end-to-end autonomous driving algorithms in recent years. Data plays a core role in the algorithm closed-loop system. However, collecting real-world data is expensive, time-consuming, and unsafe. With the development of implicit rendering technology and in-depth research on using generative models to produce data at scale, we propose OASim, an open and adaptive simulator and autonomous driving data generator based on implicit neural rendering. It has the following characteristics: (1) High-quality scene reconstruction through neural implicit surface reconstruction technology. (2) Trajectory editing of the ego vehicle and participating vehicles. (3) Rich vehicle model library that can be freely selected and inserted into the scene. (4) Rich sensors model library where you can select specified sensors to generate data. (5) A highly customizable data generation system can generate data according to user needs. We demonstrate the high quality and fidelity of the generated data through perception performance evaluation on the Carla simulator and real-world data acquisition. Code is available at https://github.com/PJLab-ADG/OASim.
StreetSurf: Extending Multi-view Implicit Surface Reconstruction to Street Views
Jun 08, 2023



We present a novel multi-view implicit surface reconstruction technique, termed StreetSurf, that is readily applicable to street view images in widely-used autonomous driving datasets, such as Waymo-perception sequences, without necessarily requiring LiDAR data. As neural rendering research expands rapidly, its integration into street views has started to draw interests. Existing approaches on street views either mainly focus on novel view synthesis with little exploration of the scene geometry, or rely heavily on dense LiDAR data when investigating reconstruction. Neither of them investigates multi-view implicit surface reconstruction, especially under settings without LiDAR data. Our method extends prior object-centric neural surface reconstruction techniques to address the unique challenges posed by the unbounded street views that are captured with non-object-centric, long and narrow camera trajectories. We delimit the unbounded space into three parts, close-range, distant-view and sky, with aligned cuboid boundaries, and adapt cuboid/hyper-cuboid hash-grids along with road-surface initialization scheme for finer and disentangled representation. To further address the geometric errors arising from textureless regions and insufficient viewing angles, we adopt geometric priors that are estimated using general purpose monocular models. Coupled with our implementation of efficient and fine-grained multi-stage ray marching strategy, we achieve state of the art reconstruction quality in both geometry and appearance within only one to two hours of training time with a single RTX3090 GPU for each street view sequence. Furthermore, we demonstrate that the reconstructed implicit surfaces have rich potential for various downstream tasks, including ray tracing and LiDAR simulation.
Foveated Neural Radiance Fields for Real-Time and Egocentric Virtual Reality
Mar 30, 2021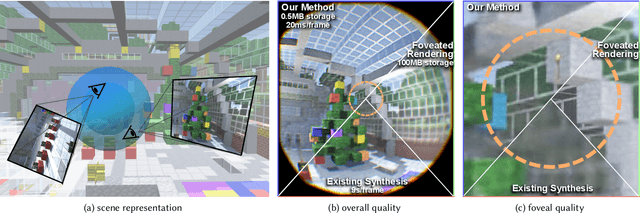
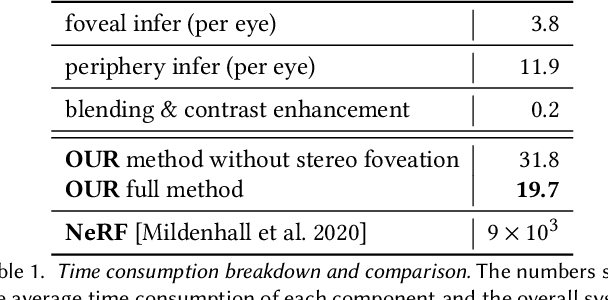
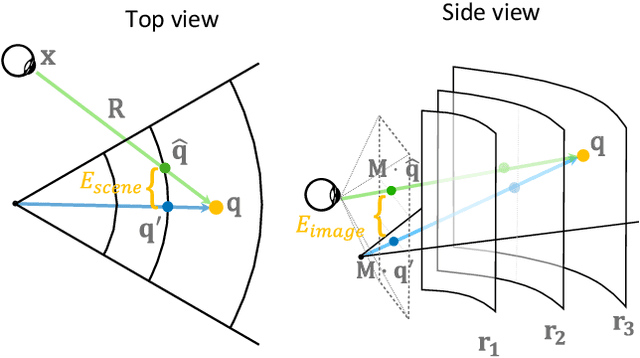
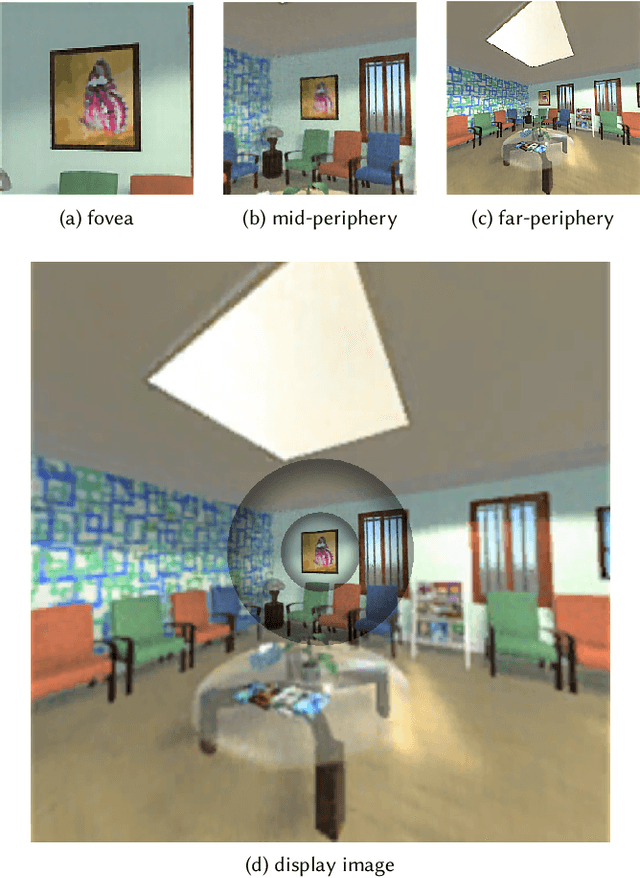
Traditional high-quality 3D graphics requires large volumes of fine-detailed scene data for rendering. This demand compromises computational efficiency and local storage resources. Specifically, it becomes more concerning for future wearable and portable virtual and augmented reality (VR/AR) displays. Recent approaches to combat this problem include remote rendering/streaming and neural representations of 3D assets. These approaches have redefined the traditional local storage-rendering pipeline by distributed computing or compression of large data. However, these methods typically suffer from high latency or low quality for practical visualization of large immersive virtual scenes, notably with extra high resolution and refresh rate requirements for VR applications such as gaming and design. Tailored for the future portable, low-storage, and energy-efficient VR platforms, we present the first gaze-contingent 3D neural representation and view synthesis method. We incorporate the human psychophysics of visual- and stereo-acuity into an egocentric neural representation of 3D scenery. Furthermore, we jointly optimize the latency/performance and visual quality, while mutually bridging human perception and neural scene synthesis, to achieve perceptually high-quality immersive interaction. Both objective analysis and subjective study demonstrate the effectiveness of our approach in significantly reducing local storage volume and synthesis latency (up to 99% reduction in both data size and computational time), while simultaneously presenting high-fidelity rendering, with perceptual quality identical to that of fully locally stored and rendered high-quality imagery.