 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActive Object Tracking using Context Estimation: Handling Occlusions and Detecting Missing Targets
Dec 14, 2019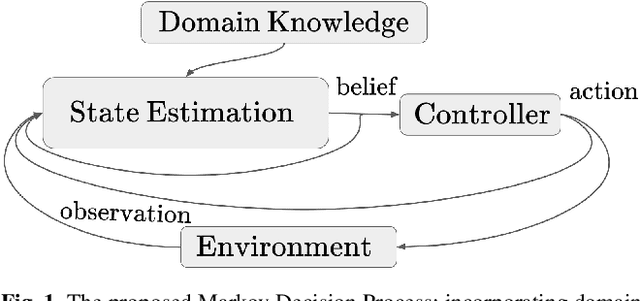
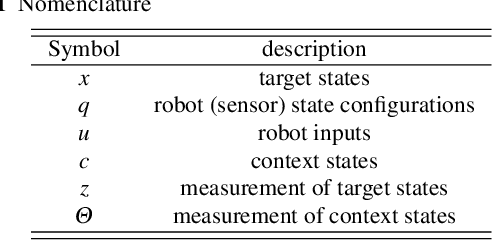
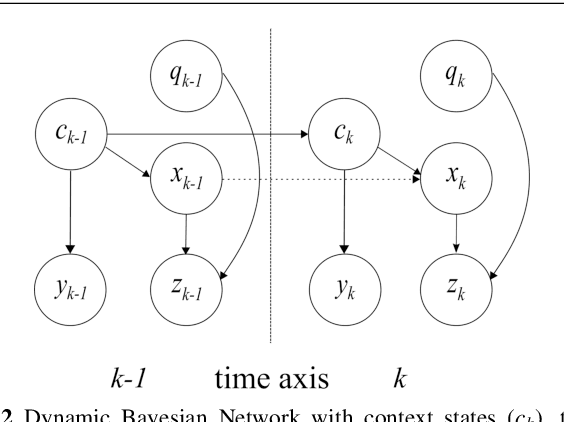
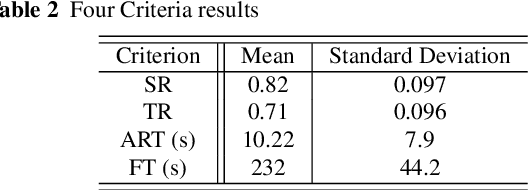
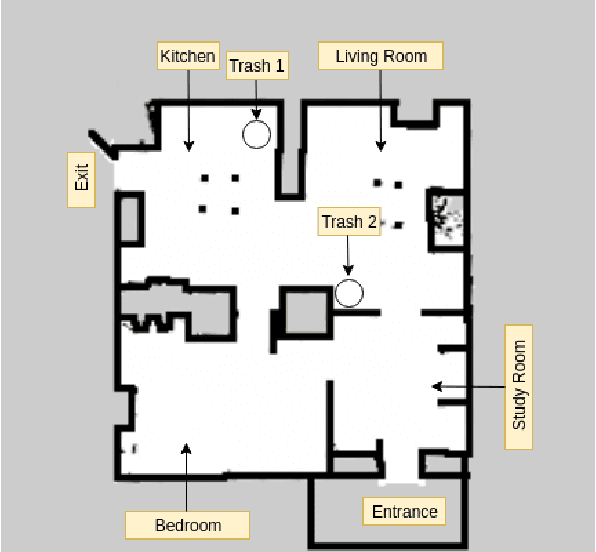
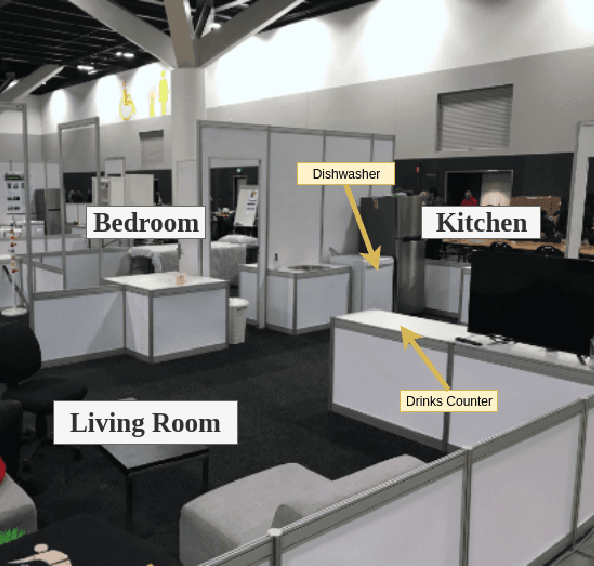
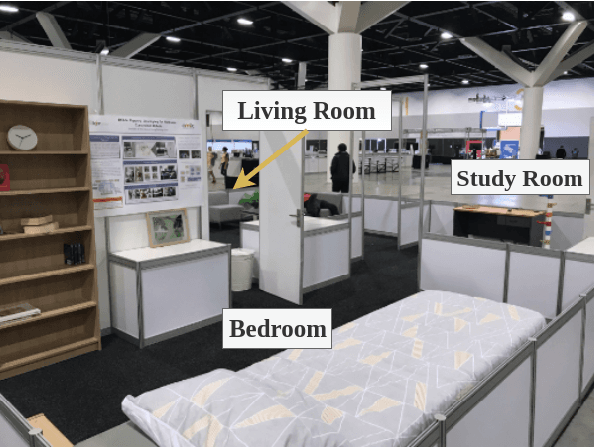
When performing visual servoing or object tracking tasks, active sensor planning is essential to keep targets in sight or to relocate them when missing. In particular, when dealing with a known target missing from the sensor's field of view, we propose using prior knowledge related to contextual information to estimate its possible location. To this end, this study proposes a Dynamic Bayesian Network that uses contextual information to effectively search for targets. Monte Carlo particle filtering is employed to approximate the posterior probability of the target's state, from which uncertainty is defined. We define the robot's utility function via information-theoretic formalism as seeking the optimal action which reduces uncertainty of a task, prompting robot agents to investigate the location where the target most likely might exist. Using a context state model, we design the agent's high-level decision framework using a Partially-Observable Markov Decision Process. Based on the estimated belief state of the context via sequential observations, the robot's navigation actions are determined to conduct exploratory and detection tasks. By using this multi-modal context model, our agent can effectively handle basic dynamic events, such as obstruction of targets or their absence from the field of view. We implement and demonstrate these capabilities on a mobile robot in real-time.
Deploying the NASA Valkyrie Humanoid for IED Response: An Initial Approach and Evaluation Summary
Oct 02, 2019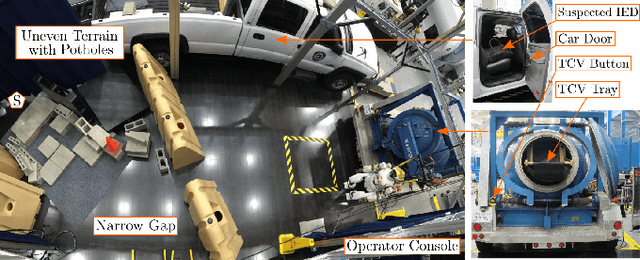
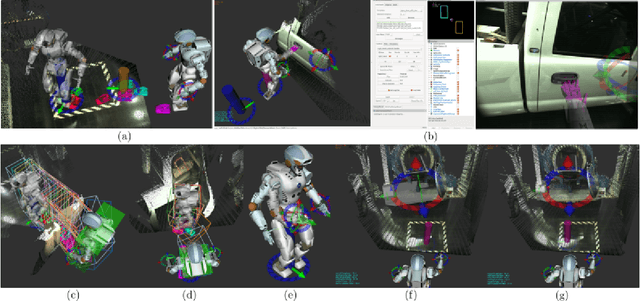
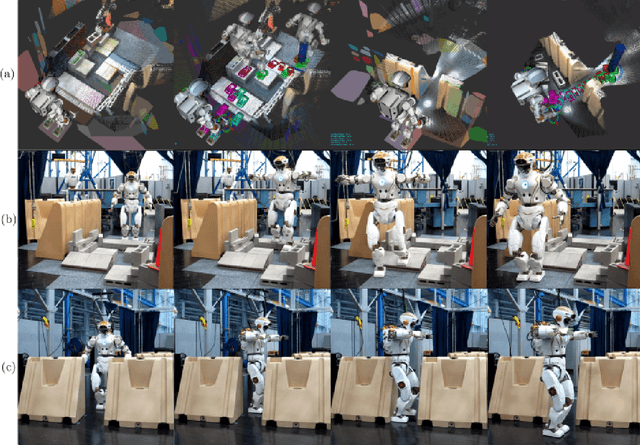
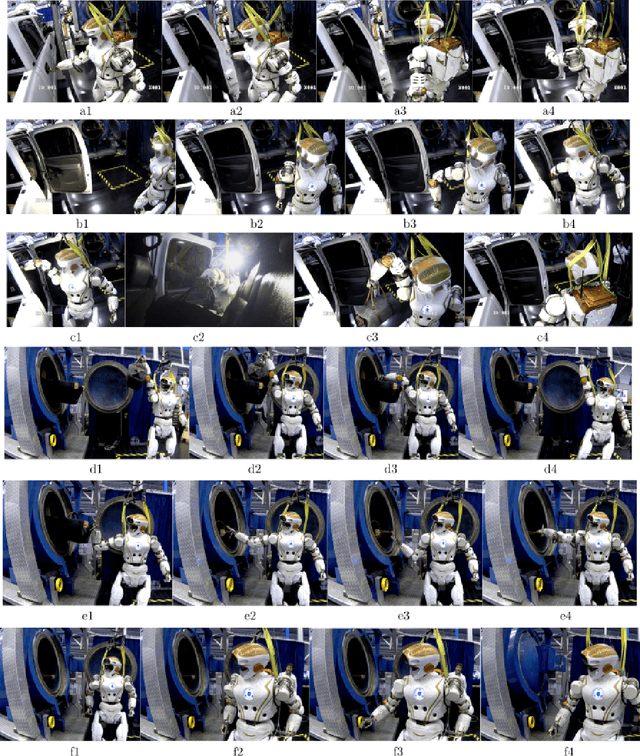
As part of a feasibility study, this paper shows the NASA Valkyrie humanoid robot performing an end-to-end improvised explosive device (IED) response task. To demonstrate and evaluate robot capabilities, sub-tasks highlight different locomotion, manipulation, and perception requirements: traversing uneven terrain, passing through a narrow passageway, opening a car door, retrieving a suspected IED, and securing the IED in a total containment vessel (TCV). For each sub-task, a description of the technical approach and the hidden challenges that were overcome during development are presented. The discussion of results, which explicitly includes existing limitations, is aimed at motivating continued research and development to enable practical deployment of humanoid robots for IED response. For instance, the data shows that operator pauses contribute to 50\% of the total completion time, which implies that further work is needed on user interfaces for increasing task completion efficiency.
Finding Locomanipulation Plans Quickly in the Locomotion Constrained Manifold
Sep 22, 2019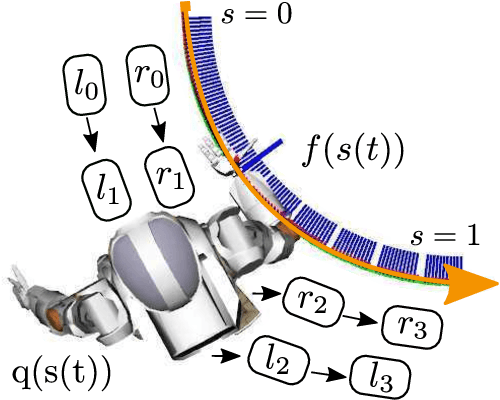
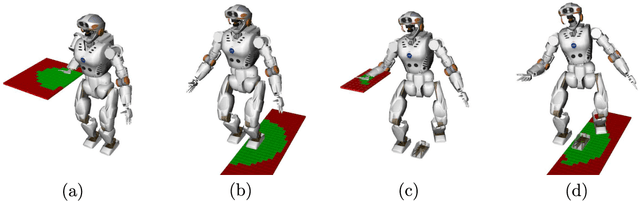
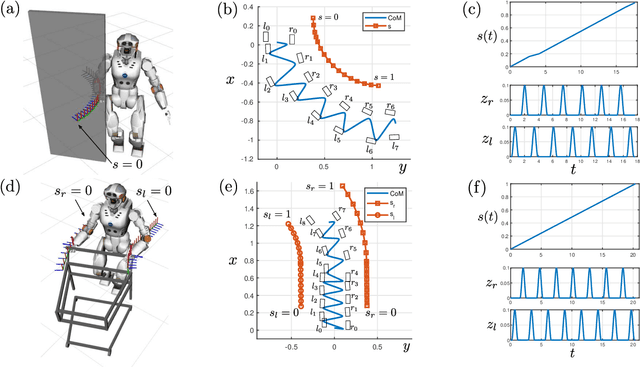
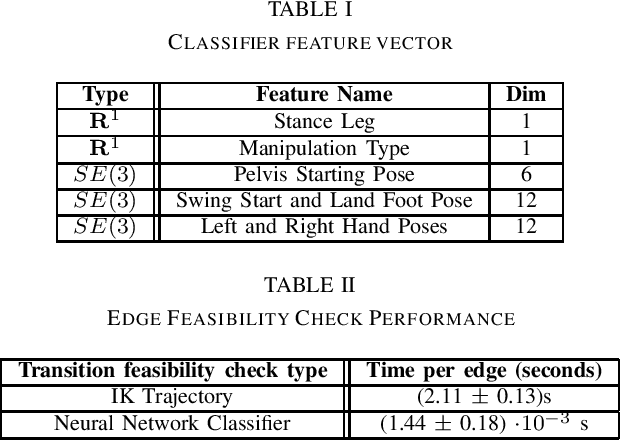
We present a method that finds locomanipulation plans that perform simultaneous locomotion and manipulation of objects for a desired end-effector trajectory. Key to our approach is to consider a generic locomotion constraint manifold that defines the locomotion scheme of the robot and then using this constraint manifold to search for admissible manipulation trajectories. The problem is formulated as a weighted-A* graph search whose planner output is a sequence of contact transitions and a path progression trajectory to construct the whole-body kinodynamic locomanipulation plan. We also provide a method for computing, visualizing and learning the locomanipulability region, which is used to efficiently evaluate the edge transition feasibility during the graph search. Experiments are performed on the NASA Valkyrie robot platform that utilizes a dynamic locomotion approach, called the divergent-component-of-motion (DCM), on two example locomanipulation scenarios.
Solving Service Robot Tasks: UT Austin Villa@Home 2019 Team Report
Sep 14, 2019
RoboCup@Home is an international robotics competition based on domestic tasks requiring autonomous capabilities pertaining to a large variety of AI technologies. Research challenges are motivated by these tasks both at the level of individual technologies and the integration of subsystems into a fully functional, robustly autonomous system. We describe the progress made by the UT Austin Villa 2019 RoboCup@Home team which represents a significant step forward in AI-based HRI due to the breadth of tasks accomplished within a unified system. Presented are the competition tasks, component technologies they rely on, our initial approaches both to the components and their integration, and directions for future research.
Data Efficient and Safe Learning for Locomotion via Simplified Model
Jun 10, 2019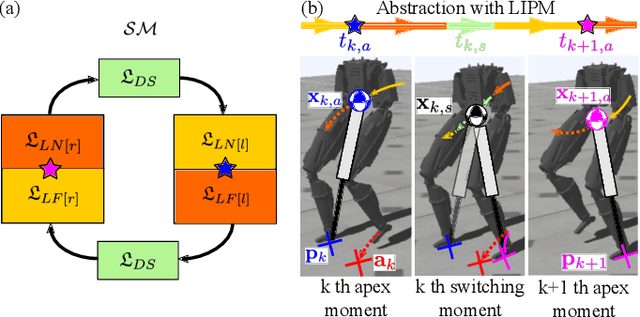
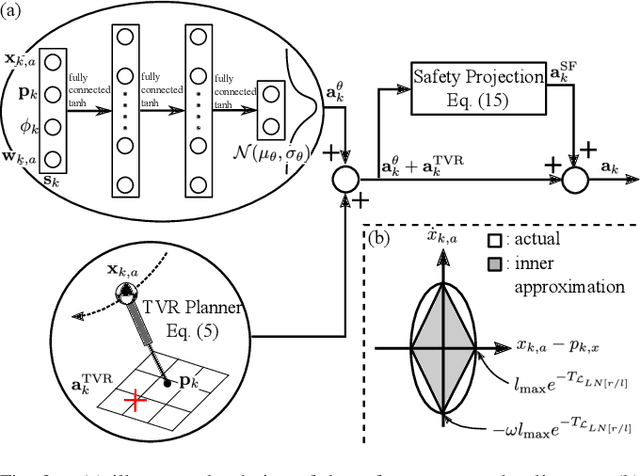
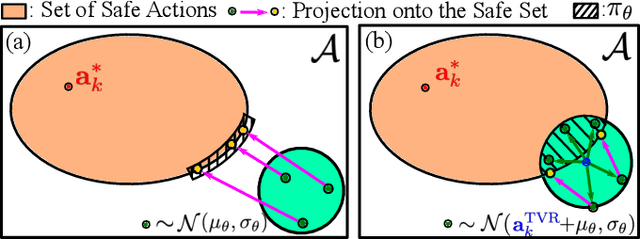
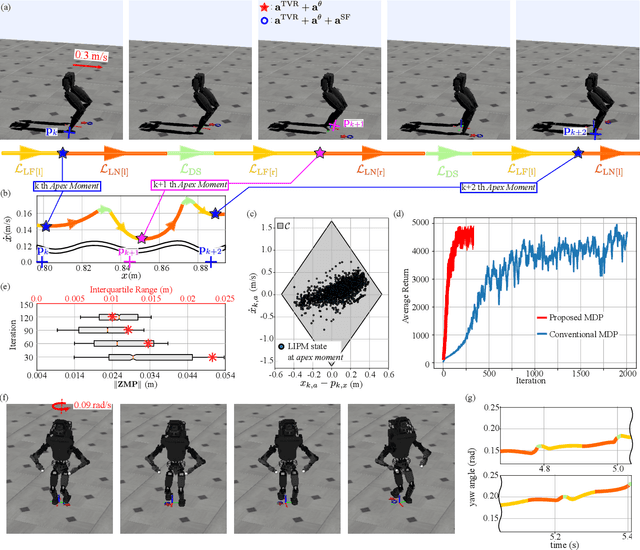
In this letter, we formulate a novel Markov Decision Process (MDP) for data efficient and safe learning for locomotion via a simplified model. In our previous studies on biped locomotion, we relied on a low-dimensional robot model, e.g., the Linear Inverted Pendulum Model (LIPM), commonly used in Walking Pattern Generators (WPG). However, employing low-level control cannot precisely track desired footstep locations due to the discrepancies between the real system and the simplified model. In this work, we propose an approach for mitigating this problem by complementing model-based policies with machine learning. We formulate an MDP process incorporating dynamic properties of robots, desired walking directions, and footstep features. We iteratively update the policy to determine footstep locations based on the previous MDP process aided by a deep reinforcement learning process. The policy of the proposed approach consists of a WPG and a parameterized stochastic policy. In addition, a Control Barrier Function (CBF) process applies corrections the above policy to prevent exploration of unsafe regions during learning. Our contributions include: 1) reduction of footstep tracking errors resulting from employing LIPM; 2) efficient exploration of the data driven process, and; 3) scalability of the procedure to any humanoid robot.
Control of A High Performance Bipedal Robot using Viscoelastic Liquid Cooled Actuators
Jun 10, 2019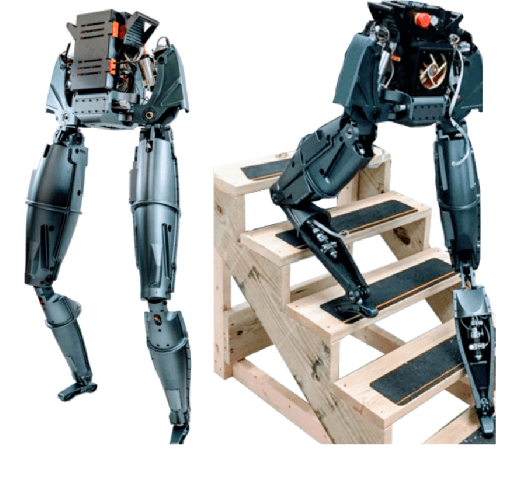
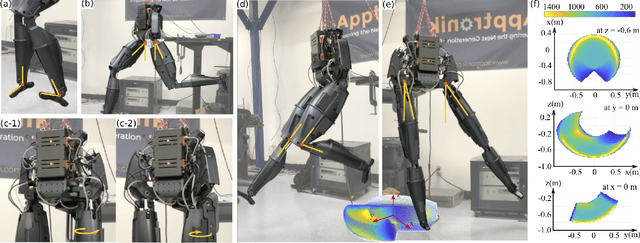
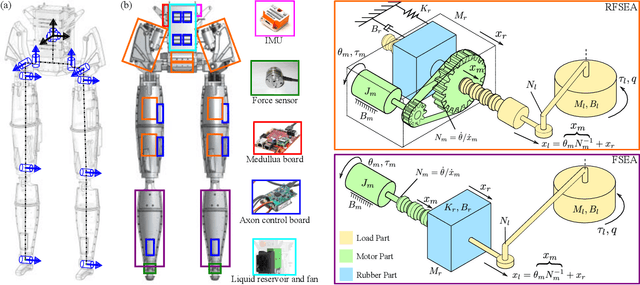
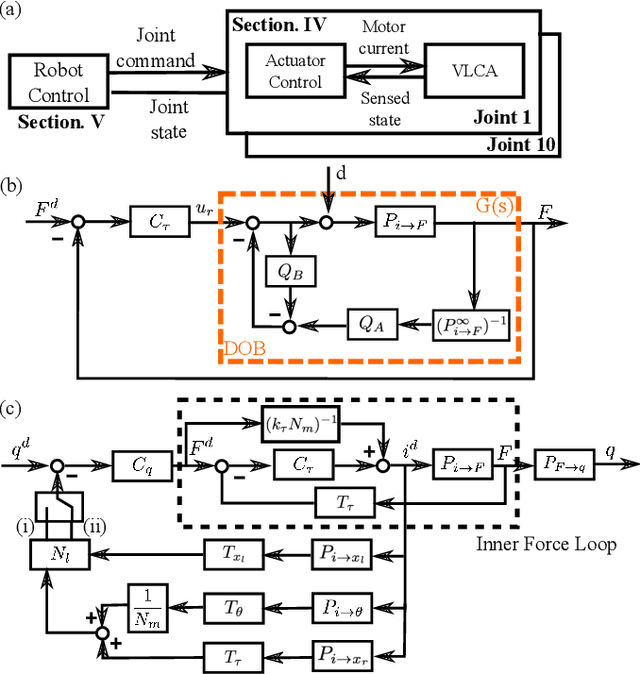
This paper describes the control, and evaluation of a new human-scaled biped robot with liquid cooled viscoelastic actuators (VLCA). Based on the lessons learned from previous work from our team on VLCA [1], we present a new system design embodying a Reaction Force Sensing Series Elastic Actuator (RFSEA) and a Force Sensing Series Elastic Actuator (FSEA). These designs are aimed at reducing the size and weight of the robot's actuation system while inheriting the advantages of our designs such as energy efficiency, torque density, impact resistance and position/force controllability. The system design takes into consideration human-inspired kinematics and range-of-motion (ROM), while relying on foot placement to balance. In terms of actuator control, we perform a stability analysis on a Disturbance Observer (DOB) designed for force control. We then evaluate various position control algorithms both in the time and frequency domains for our VLCA actuators. Having the low level baseline established, we first perform a controller evaluation on the legs using Operational Space Control (OSC) [2]. Finally, we move on to evaluating the full bipedal robot by accomplishing unsupported dynamic walking by means of the algorithms to appear in [3].
Decentralized Control Systems Laboratory Using Human Centered Robotic Actuators
Apr 09, 2019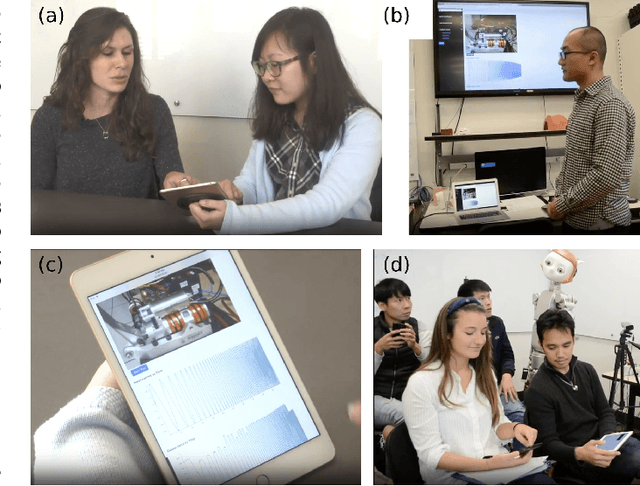
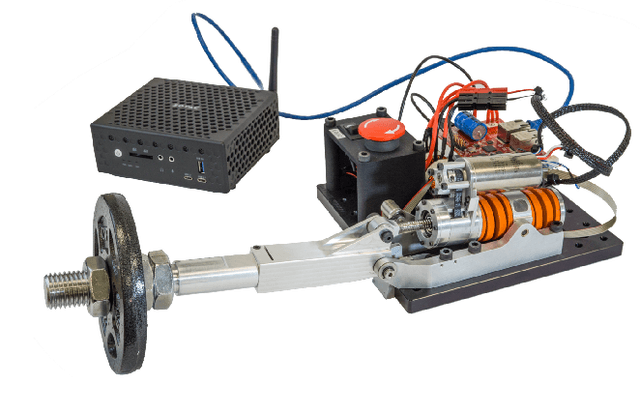
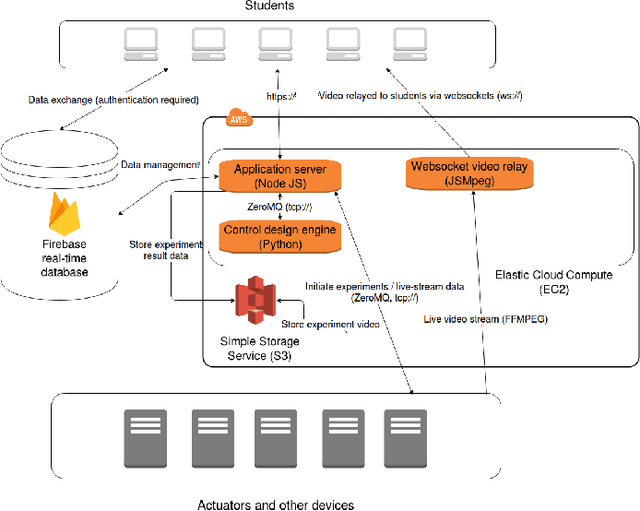
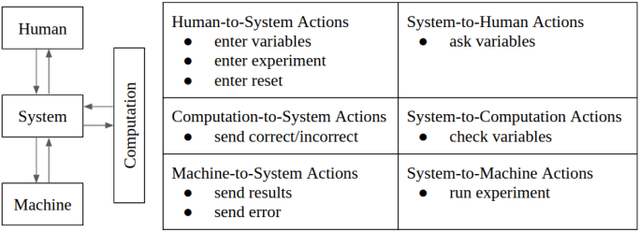
University laboratories deliver unique hands-on experimentation for STEM students but often lack state-of-the-art equipment and provide limited access to their equipment. The University of Texas Cloud Laboratory provides remote access to a cutting-edge series elastic actuators for student experimentation regarding human-centered robotics, dynamical systems, and controls. Through a browser-based interface, students are provided with various learning materials using the remote hardware-in-the-loop system for effective experiment-based education. This paper discusses the methods used to connect remote hardware to mobile browsers, the adaptation of textbook materials regarding system identification and feedback control, data processing to generate clean and useful results for student interpretation, and initial usage of the end-to-end system for individual and group learning.
Efficient Trajectory Generation for Robotic Systems Constrained by Contact Forces
Mar 26, 2019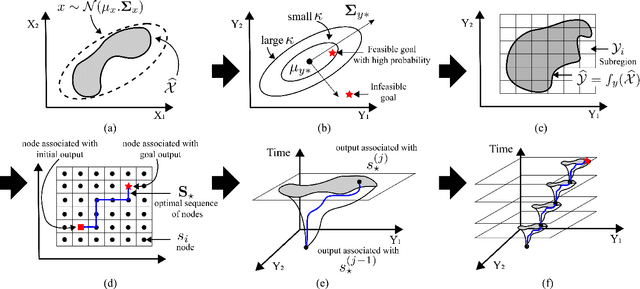
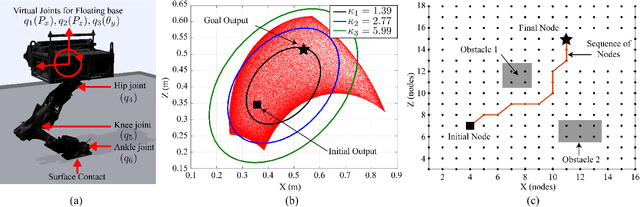
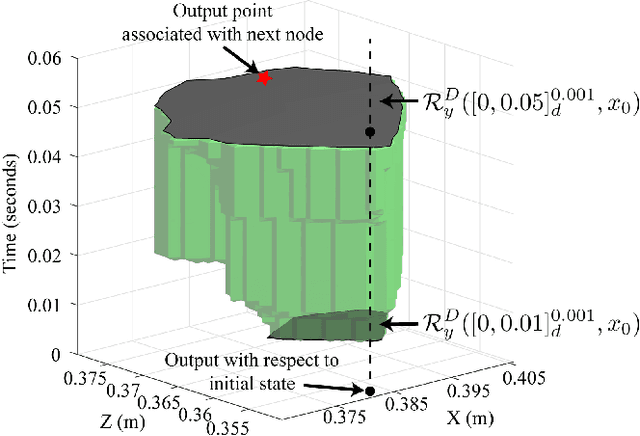
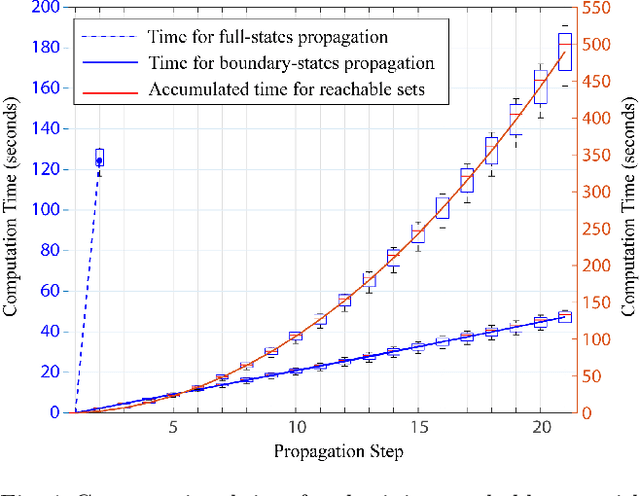
In this work, we propose a trajectory generation method for robotic systems with contact force constraint based on optimal control and reachability analysis. Normally, the dynamics and constraints of the contact-constrained robot are nonlinear and coupled to each other. Instead of linearizing the model and constraints, we directly solve the optimal control problem to obtain the feasible state trajectory and the control input of the system. A tractable optimal control problem is formulated which is addressed by dual approaches, which are sampling-based dynamic programming and rigorous reachability analysis. The sampling-based method and Partially Observable Markov Decision Process (POMDP) are used to break down the end-to-end trajectory generation problem via sample-wise optimization in terms of given conditions. The result generates sequential pairs of subregions to be passed to reach the final goal. The reachability analysis ensures that we will find at least one trajectory starting from a given initial state and going through a sequence of subregions. The distinctive contributions of our method are to enable handling the intricate contact constraint coupled with system's dynamics due to the reduction of computational complexity of the algorithm. We validate our method using extensive numerical simulations with a legged robot.
Compliance Shaping for Control of Strength Amplification Exoskeletons with Elastic Cuffs
Mar 22, 2019
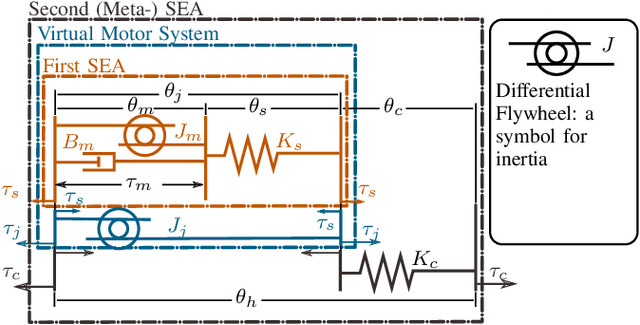
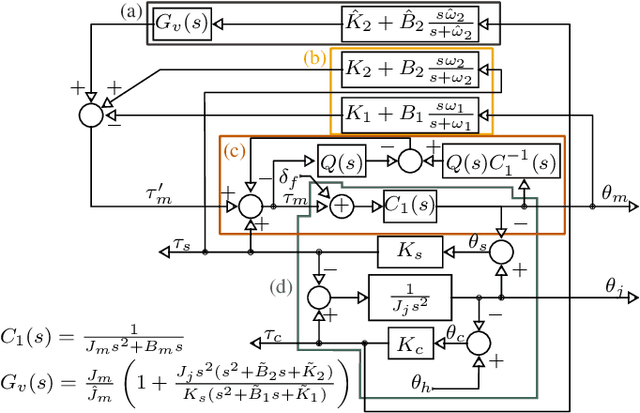
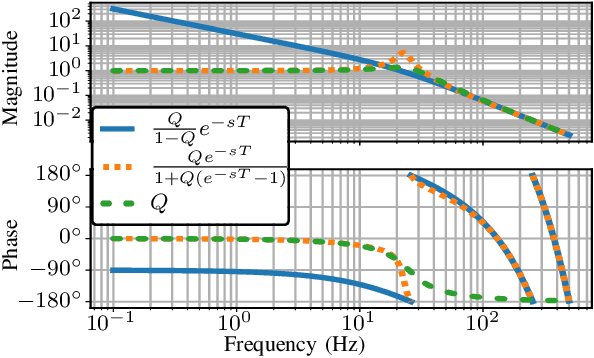
Exoskeletons which amplify the strength of their operators can enable heavy-duty manipulation of unknown objects. However, this type of behavior is difficult to accomplish; it requires the exoskeleton to sense and amplify the operator's interaction forces while remaining stable. But, the goals of amplification and robust stability when connected to the operator fundamentally conflict. As a solution, we introduce a design with a spring in series with the force sensitive cuff. This allows us to design an exoskeleton compliance behavior which is nominally passive, even with high amplification ratios. In practice, time delay and discrete time filters prevent our strategy from actually achieving passivity, but the designed compliance still makes the exoskeleton more robust to spring-like human behaviors. Our exoskeleton is actuated by a series elastic actuator (SEA), which introduces another spring into the system. We show that shaping the cuff compliance for the exoskeleton can be made into approximately the same problem as shaping the spring compliance of an SEA. We therefore introduce a feedback controller and gain tuning method which takes advantage of an existing compliance shaping technique for SEAs. We call our strategy the "double compliance shaping" method. With large amplification ratios, this controller tends to amplify nonlinear transmission friction effects, so we additionally propose a "transmission disturbance observer" to mitigate this drawback. Our methods are validated on a single-degree-of-freedom elbow exoskeleton.
Complex Stiffness Model of Physical Human-Robot Interaction: Implications for Control of Performance Augmentation Exoskeletons
Mar 06, 2019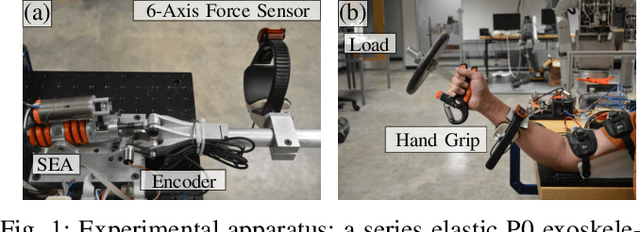
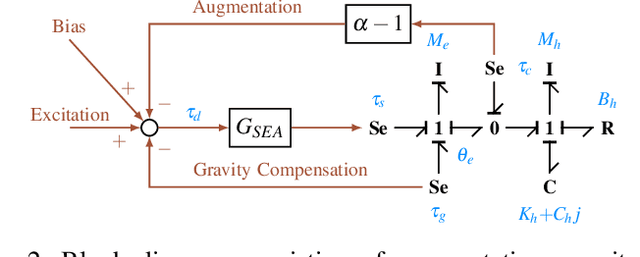
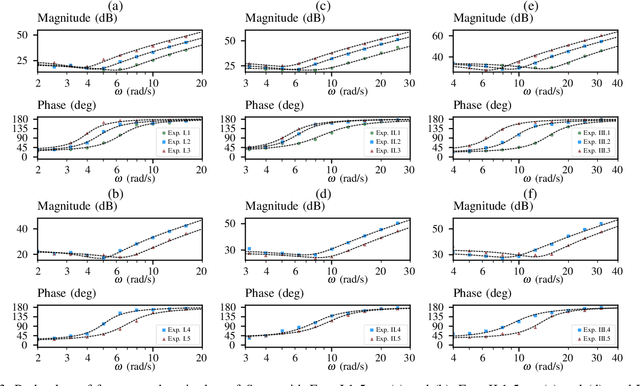
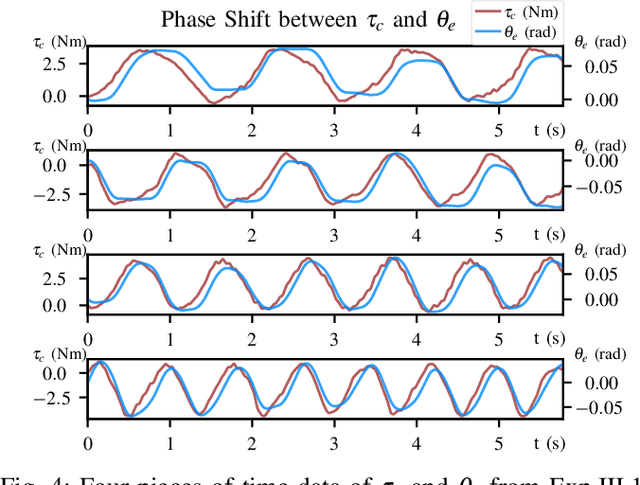
Human joint dynamic stiffness plays an important role in the stability of performance augmentation exoskeletons. In this paper, we consider a new frequency domain model of the human joint dynamics which features a complex value stiffness. This complex stiffness consists of a real stiffness and a hysteretic damping. We use it to explain the dynamic behaviors of the human connected to the exoskeleton, in particular the observed non-zero low frequency phase shift and the near constant damping ratio of the resonant as stiffness and inertia vary. We validate this concept by experimenting with an elbow-joint exoskeleton testbed on a subject while modifying joint stiffness behavior, exoskeleton inertia, and strength augmentation gains. We compare three different models of elbow-joint dynamic stiffness: a model with real stiffness, viscous damping and inertia, a model with complex stiffness and inertia, and a model combining the previous two models. Our results show that the hysteretic damping term improves modeling accuracy, using a statistical F-test. Moreover this improvement is statistically more significant than using classical viscous damping term. In addition, we experimentally observe a linear relationship between the hysteretic damping and the real part of the stiffness which allows us to simplify the complex stiffness model as a 1-parameter system. Ultimately, we design a fractional order controller to demonstrate how human hysteretic damping behavior can be exploited to improve strength amplification performance while maintaining stability.