 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Control of a Compact Series Elastic Actuator Module for Robots in MRI Scanners
Jun 11, 2024



In this study, we introduce a novel MRI-compatible rotary series elastic actuator module utilizing velocity-sourced ultrasonic motors for force-controlled robots operating within MRI scanners. Unlike previous MRI-compatible SEA designs, our module incorporates a transmission force sensing series elastic actuator structure, with four off-the-shelf compression springs strategically placed between the gearbox housing and the motor housing. This design features a compact size, thus expanding possibilities for a wider range of MRI robotic applications. To achieve precise torque control, we develop a controller that incorporates a disturbance observer tailored for velocity-sourced motors. This controller enhances the robustness of torque control in our actuator module, even in the presence of varying external impedance, thereby augmenting its suitability for MRI-guided medical interventions. Experimental validation demonstrates the actuator's torque control performance in both 3 Tesla MRI and non-MRI environments, achieving a settling time of 0.1 seconds and a steady-state error within 2% of its maximum output torque. Notably, our force controller exhibits consistent performance across low and high external impedance scenarios, in contrast to conventional controllers for velocity-sourced series elastic actuators, which struggle with steady-state performance under low external impedance conditions.
A Barrier Pair Method for Safe Human-Robot Shared Autonomy
Dec 01, 2021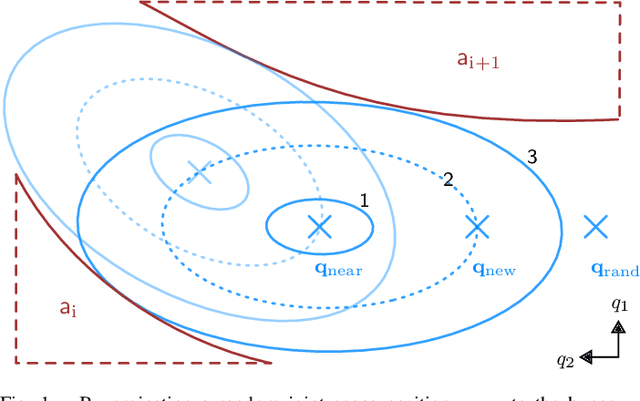
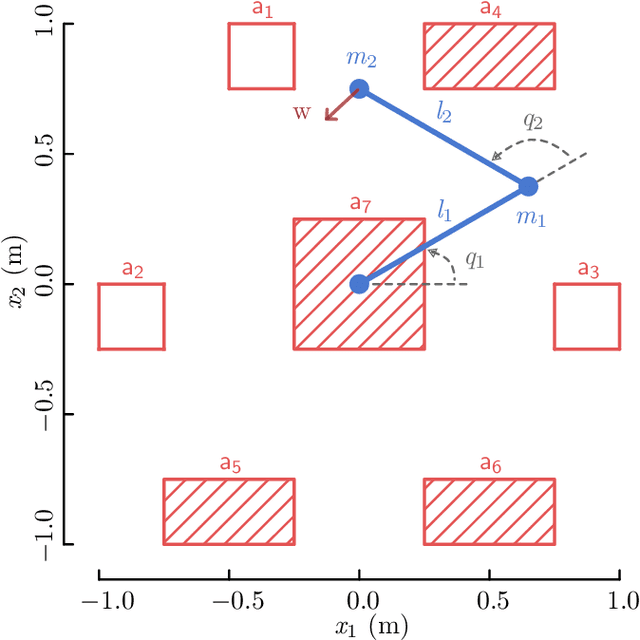
Shared autonomy provides a framework where a human and an automated system, such as a robot, jointly control the system's behavior, enabling an effective solution for various applications, including human-robot interaction. However, a challenging problem in shared autonomy is safety because the human input may be unknown and unpredictable, which affects the robot's safety constraints. If the human input is a force applied through physical contact with the robot, it also alters the robot's behavior to maintain safety. We address the safety issue of shared autonomy in real-time applications by proposing a two-layer control framework. In the first layer, we use the history of human input measurements to infer what the human wants the robot to do and define the robot's safety constraints according to that inference. In the second layer, we formulate a rapidly-exploring random tree of barrier pairs, with each barrier pair composed of a barrier function and a controller. Using the controllers in these barrier pairs, the robot is able to maintain its safe operation under the intervention from the human input. This proposed control framework allows the robot to assist the human while preventing them from encountering safety issues. We demonstrate the proposed control framework on a simulation of a two-linkage manipulator robot.
A Complex Stiffness Human Impedance Model with Customizable Exoskeleton Control
Sep 25, 2020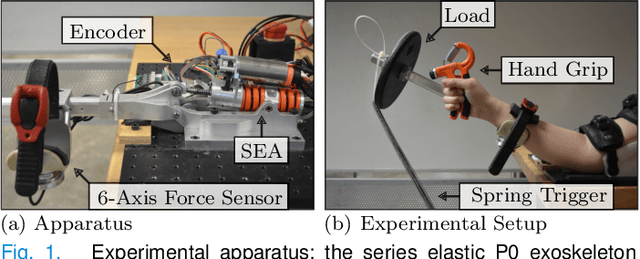
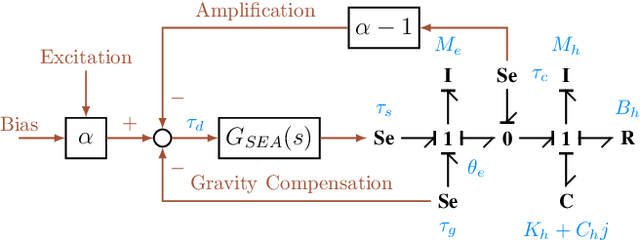
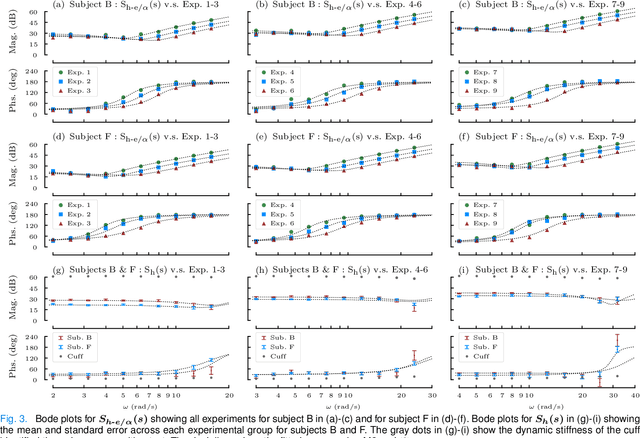
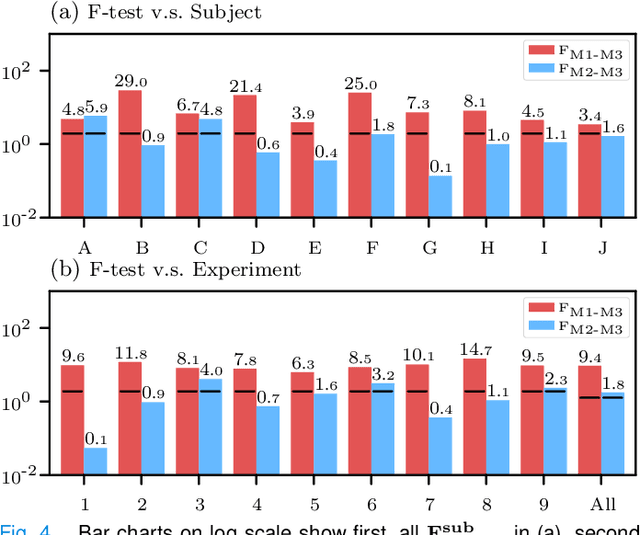
The natural impedance, or dynamic relationship between force and motion, of a human operator can determine the stability of exoskeletons that use interaction-torque feedback to amplify human strength. While human impedance is typically modelled as a linear system, our experiments on a single-joint exoskeleton testbed involving 10 human subjects show evidence of nonlinear behavior: a low-frequency asymptotic phase for the dynamic stiffness of the human that is different than the expected zero, and an unexpectedly consistent damping ratio as the stiffness and inertia vary. To explain these observations, this paper considers a new frequency-domain model of the human joint dynamics featuring complex value stiffness comprising a real stiffness term and a hysteretic damping term. Using a statistical F-test we show that the hysteretic damping term is not only significant but is even more significant than the linear damping term. Further analysis reveals a linear trend linking hysteretic damping and the real part of the stiffness, which allows us to simplify the complex stiffness model down to a 1-parameter system. Then, we introduce and demonstrate a customizable fractional-order controller that exploits this hysteretic damping behavior to improve strength amplification bandwidth while maintaining stability, and explore a tuning approach which ensures that this stability property is robust to muscle co-contraction for each individual.
BP-RRT: Barrier Pair Synthesis for Temporal Logic Motion Planning
Sep 05, 2020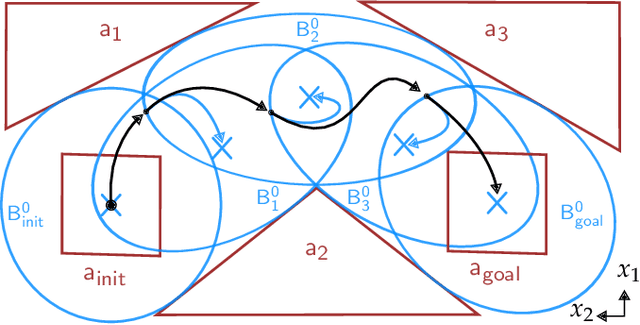
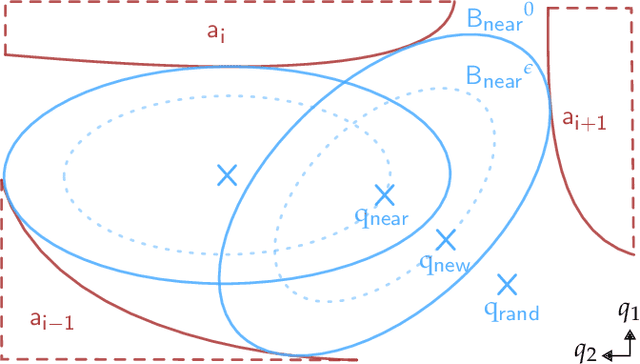
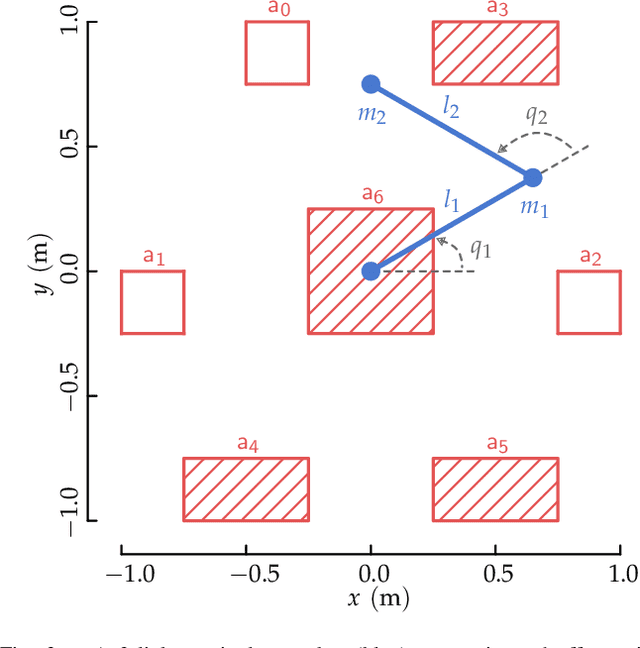
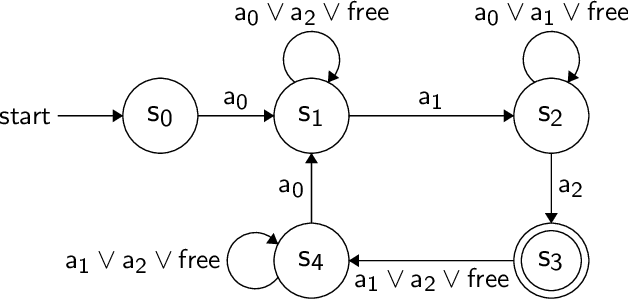
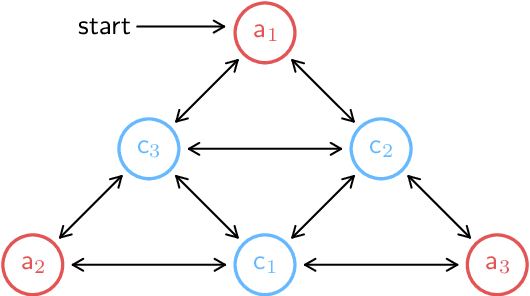
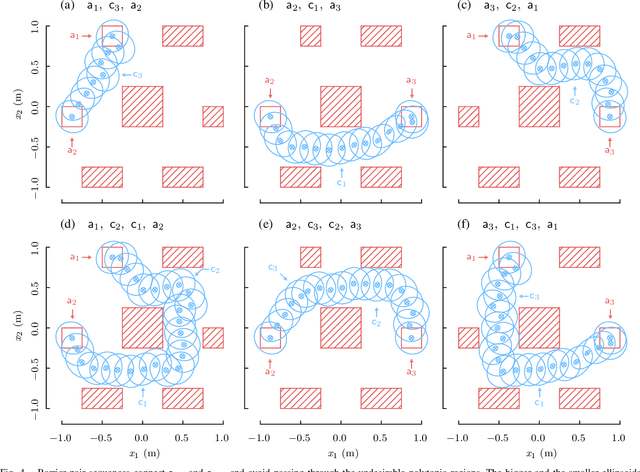
For a nonlinear system (e.g. a robot) with its continuous state space trajectories constrained by a linear temporal logic specification, the synthesis of a low-level controller for mission execution often results in a non-convex optimization problem. We devise a new algorithm to solve this type of non-convex problems by formulating a rapidly-exploring random tree of barrier pairs, with each barrier pair composed of a quadratic barrier function and a full state feedback controller. The proposed method employs a rapid-exploring random tree to deal with the non-convex constraints and uses barrier pairs to fulfill the local convex constraints. As such, the method solves control problems fulfilling the required transitions of an automaton in order to satisfy given linear temporal logic constraints. At the same time it synthesizes locally optimal controllers in order to transition between the regions corresponding to the alphabet of the automaton. We demonstrate this new algorithm on a simulation of a two linkage manipulator robot.
Decentralized Control Systems Laboratory Using Human Centered Robotic Actuators
Apr 09, 2019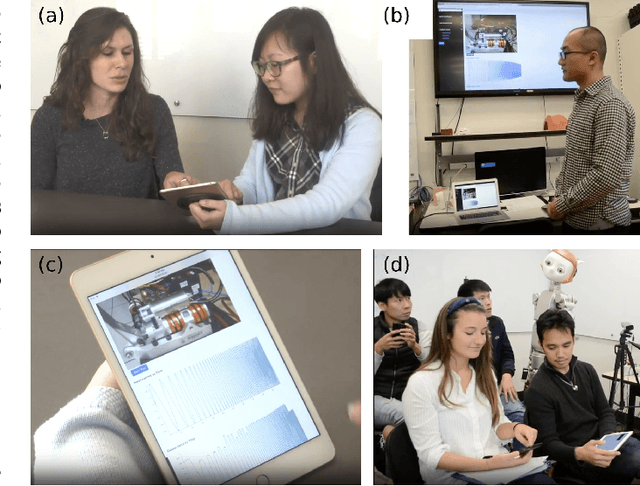
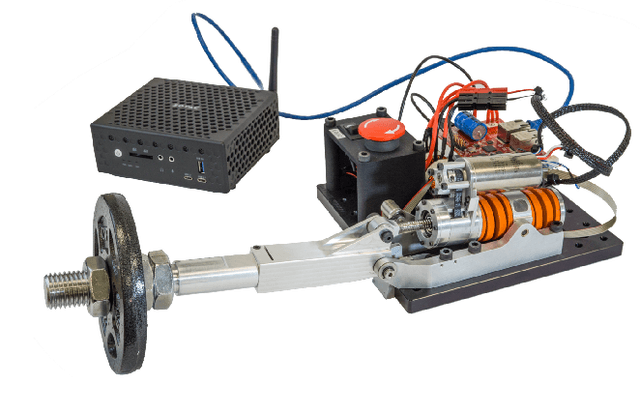
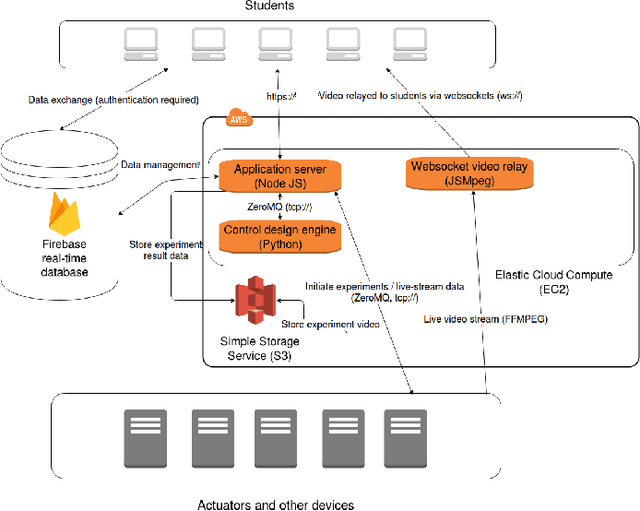
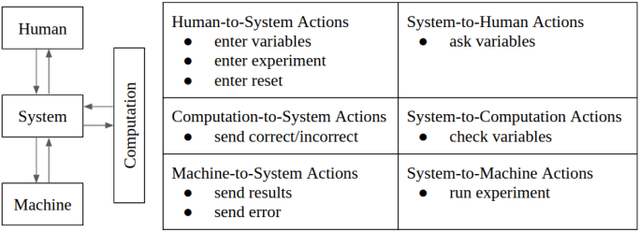
University laboratories deliver unique hands-on experimentation for STEM students but often lack state-of-the-art equipment and provide limited access to their equipment. The University of Texas Cloud Laboratory provides remote access to a cutting-edge series elastic actuators for student experimentation regarding human-centered robotics, dynamical systems, and controls. Through a browser-based interface, students are provided with various learning materials using the remote hardware-in-the-loop system for effective experiment-based education. This paper discusses the methods used to connect remote hardware to mobile browsers, the adaptation of textbook materials regarding system identification and feedback control, data processing to generate clean and useful results for student interpretation, and initial usage of the end-to-end system for individual and group learning.
Complex Stiffness Model of Physical Human-Robot Interaction: Implications for Control of Performance Augmentation Exoskeletons
Mar 06, 2019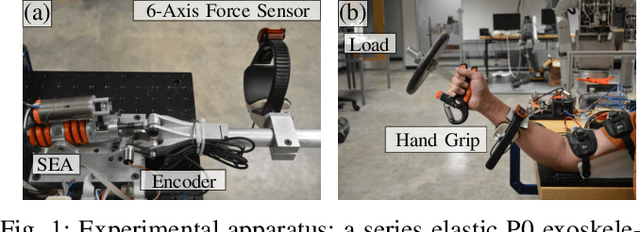
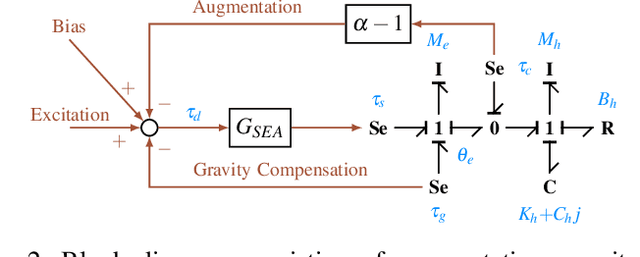
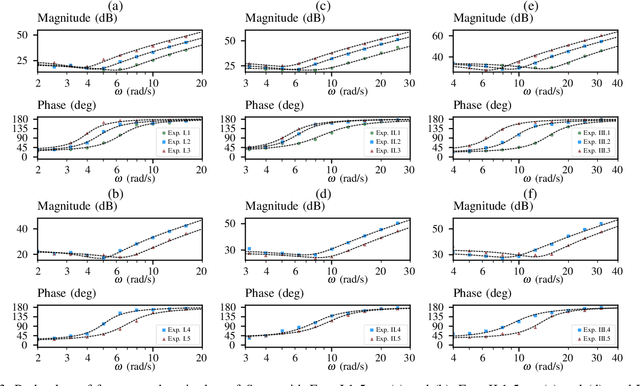
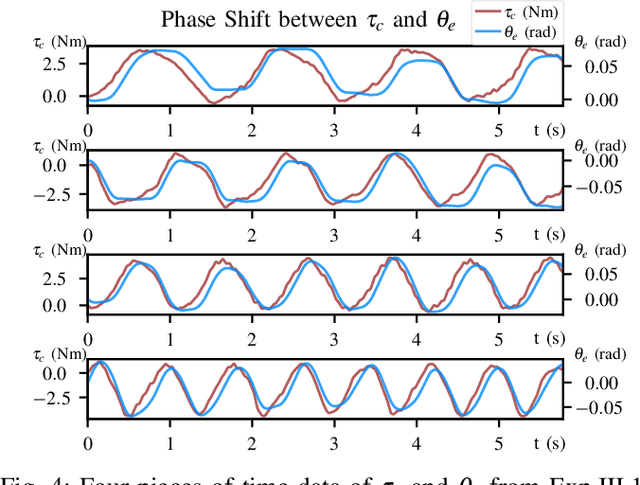
Human joint dynamic stiffness plays an important role in the stability of performance augmentation exoskeletons. In this paper, we consider a new frequency domain model of the human joint dynamics which features a complex value stiffness. This complex stiffness consists of a real stiffness and a hysteretic damping. We use it to explain the dynamic behaviors of the human connected to the exoskeleton, in particular the observed non-zero low frequency phase shift and the near constant damping ratio of the resonant as stiffness and inertia vary. We validate this concept by experimenting with an elbow-joint exoskeleton testbed on a subject while modifying joint stiffness behavior, exoskeleton inertia, and strength augmentation gains. We compare three different models of elbow-joint dynamic stiffness: a model with real stiffness, viscous damping and inertia, a model with complex stiffness and inertia, and a model combining the previous two models. Our results show that the hysteretic damping term improves modeling accuracy, using a statistical F-test. Moreover this improvement is statistically more significant than using classical viscous damping term. In addition, we experimentally observe a linear relationship between the hysteretic damping and the real part of the stiffness which allows us to simplify the complex stiffness model as a 1-parameter system. Ultimately, we design a fractional order controller to demonstrate how human hysteretic damping behavior can be exploited to improve strength amplification performance while maintaining stability.
Web Based Teleoperation of a Humanoid Robot
Jul 19, 2016The Cloud-based Advanced Robotics Laboratory (CARL) integrates a whole body controller and web-based teleoperation to enable any device with a web browser to access and control a humanoid robot. By integrating humanoid robots with the cloud, they are accessible from any Internet-connected device. Increased accessibility is important because few people have access to state-of-the-art humanoid robots limiting their rate of development. CARL's implementation is based on modern software libraries, frameworks, and middleware including Node.js, Socket.IO, ZMQ, ROS, Robot Web Tools, and ControlIt! Feasibility is demonstrated by having inexperienced human operators use a smartphone's web-browser to control Dreamer, a torque-controlled humanoid robot based on series elastic actuators, and make it perform a dual-arm manipulation task. The implementation serves as a proof-of-concept and foundation upon which many advanced humanoid robot technologies can be researched and developed.